基于VAPID的道路清障車扶正控制研究
2013-07-25 03:34:50呂成緒張為公
中國(guó)機(jī)械工程 2013年10期
關(guān)鍵詞:模型
呂成緒 張為公 李 旭
1.東南大學(xué),南京,210018 2.南京農(nóng)業(yè)大學(xué),南京,210031
0 引言
道路清障車是交通事故救援的主要裝備。扶正作為道路清障車的主要功能,是影響道路交通事故救援效率的關(guān)鍵因素。目前國(guó)內(nèi)對(duì)道路清障車的研究主要集中在結(jié)構(gòu)設(shè)計(jì)方面[1-7]。與道路清障車扶正系統(tǒng)類似的汽車起重機(jī)起升系統(tǒng)的研究,主要面向其伸縮臂控制及二次起升問(wèn)題[8-10],而針對(duì)扶正控制的研究成果較少。
國(guó)內(nèi)道路清障車主要配備雙卷?yè)P(yáng)[11-12],國(guó)外多為四到六個(gè)卷?yè)P(yáng)。清障救援作業(yè)時(shí),由清障救援人員手動(dòng)控制、協(xié)調(diào)各卷?yè)P(yáng)位移,實(shí)現(xiàn)事故車輛扶正[13-16]。扶正過(guò)程中,具體操作因清障救援人員經(jīng)驗(yàn)而異,缺乏規(guī)范,自動(dòng)化程度低,嚴(yán)重影響救援效率。采用雙卷?yè)P(yáng)扶正時(shí),捆扎復(fù)雜,且不能保證扶正過(guò)程的穩(wěn)定性,容易引發(fā)二次事故。
為了順應(yīng)工程機(jī)械自動(dòng)化、智能化的發(fā)展趨勢(shì)[17],提高救援效率,本文對(duì)道路清障車的自動(dòng)扶正控制進(jìn)行了研究。根據(jù)事故車輛與道路清障車的幾何位置關(guān)系,建立了扶正控制模型,獲得了控制對(duì)象的變化規(guī)律,并分別利用常規(guī)PID控制算法和變參數(shù)PID(VAPID)控制算法,對(duì)該模型進(jìn)行了仿真研究。
1 扶正過(guò)程建模
為簡(jiǎn)化模型,將事故車輛以長(zhǎng)方體剛體代替,不考慮側(cè)向位移,將扶正過(guò)程簡(jiǎn)化為定軸轉(zhuǎn)動(dòng)。模型采用四卷?yè)P(yáng)(主副卷?yè)P(yáng)各2個(gè))。為保證扶正過(guò)程平穩(wěn),以扶正過(guò)程中事故車輛姿態(tài)為控制對(duì)象,研究扶正過(guò)程中各卷?yè)P(yáng)之間的位移關(guān)系。建立圖1所示的扶正模型。圖1中,AB為事故車輛高度;BC為事故車輛寬度;CD為事故車輛長(zhǎng)度;AJ為事故車輛前懸長(zhǎng)度;JK為事故車輛軸距;KF為事故車輛后懸長(zhǎng)度;P、Q為道路清障車吊臂上主副卷?yè)P(yáng)固定滑輪位置;K、J、L、M為事故車輛輪胎鋼圈位置;AOEF為事故車輛底盤(pán)。
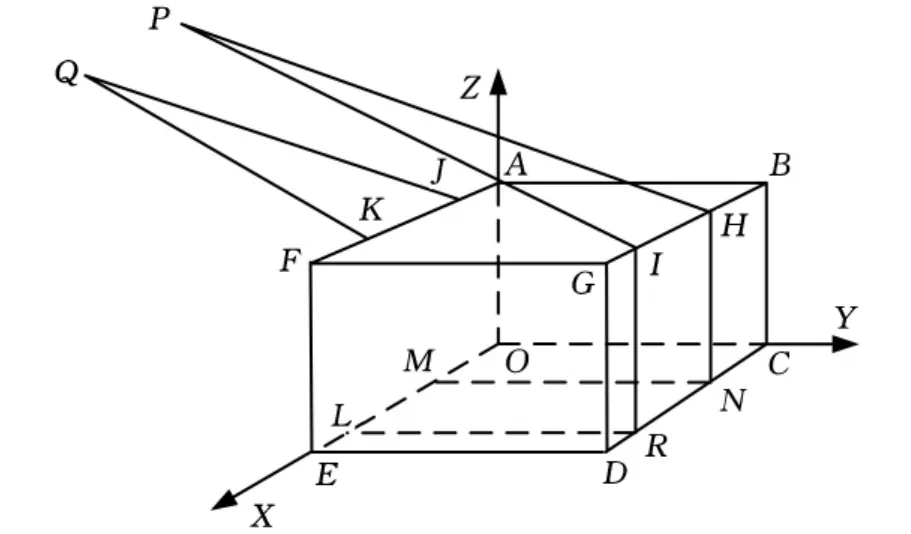
圖1 扶正模型
扶正時(shí)以4個(gè)輪胎鋼圈作為捆扎固定位置。捆扎時(shí),要求MN∥LR∥AB,NH∥RI∥OA,繩索PHM和PIL分別連接2個(gè)主卷?yè)P(yáng),QK、QJ連接2個(gè)副卷?yè)P(yáng)。扶正過(guò)程中,設(shè)卷?yè)P(yáng)到吊鉤的距離及LI、MH等長(zhǎng)度保持不變,只有PH、PI、QK、QJ隨事故車輛翻轉(zhuǎn)角度而變化。
圖2所示為扶正模型在YOZ平面的投影。設(shè)AB=a,BC=b,CD=c,AJ=d,AK=e,P點(diǎn)坐標(biāo)為(x1,y1,z1),Q點(diǎn)坐標(biāo)為(x2,y2,z2)。根據(jù)幾何關(guān)系,可得
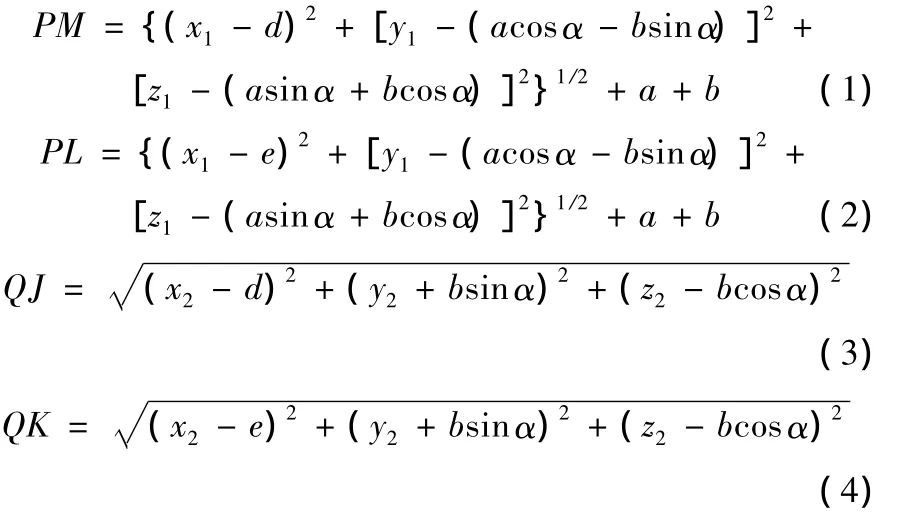
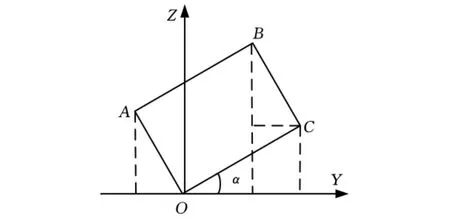
圖2 扶正模型在YOZ平面投影圖
扶正過(guò)程應(yīng)安全平穩(wěn),避免二次事故,因此控制策略以事故車輛姿態(tài)平穩(wěn)為首要考慮。假設(shè)事故車輛以角速度ω勻速扶正,即α=ωt。一旦確定ω及事故車輛特征參數(shù)、清障救援車輛與事故車輛的相對(duì)位置,根據(jù)上述公式即可求得扶正過(guò)程各卷?yè)P(yáng)位移變化曲線。
以一般的家用轎車為例,設(shè)事故車輛長(zhǎng)寬高為4.8m、1.8m、1.4m,車輛前懸長(zhǎng)度為 0.9m,后懸長(zhǎng)度為1.2m,軸距為2.7m,即a=1.4m,b=1.8m,c=4.8m,d=0.9m,e=0.9+2.7=3.6m。道路清障車主副卷?yè)P(yáng)固定滑輪坐標(biāo)為P(2m,-3m,4m)、Q(2m,-3.5m,3m),角速度ω=10°/min。將上述參數(shù)代入式(1)~式(4),可分別求得4個(gè)卷?yè)P(yáng)的位移曲線,如圖3所示。
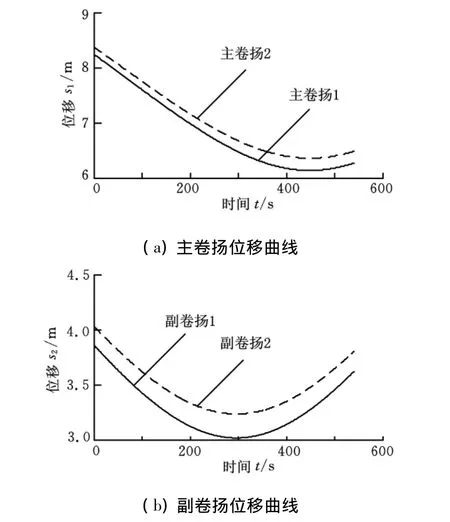
圖3 卷?yè)P(yáng)位移曲線
扶正過(guò)程中,該位移曲線的變化量即為各卷?yè)P(yáng)收放繩索的長(zhǎng)度,負(fù)值表示繩索收緊,正值表示卷?yè)P(yáng)放繩。因?yàn)榉稣^(guò)程比較緩慢,以60s為間隔進(jìn)行計(jì)算,將t+60時(shí)刻位移與t時(shí)刻位移相減,即可得到各卷?yè)P(yáng)工作時(shí),位移隨時(shí)間的變化曲線,如圖4所示。
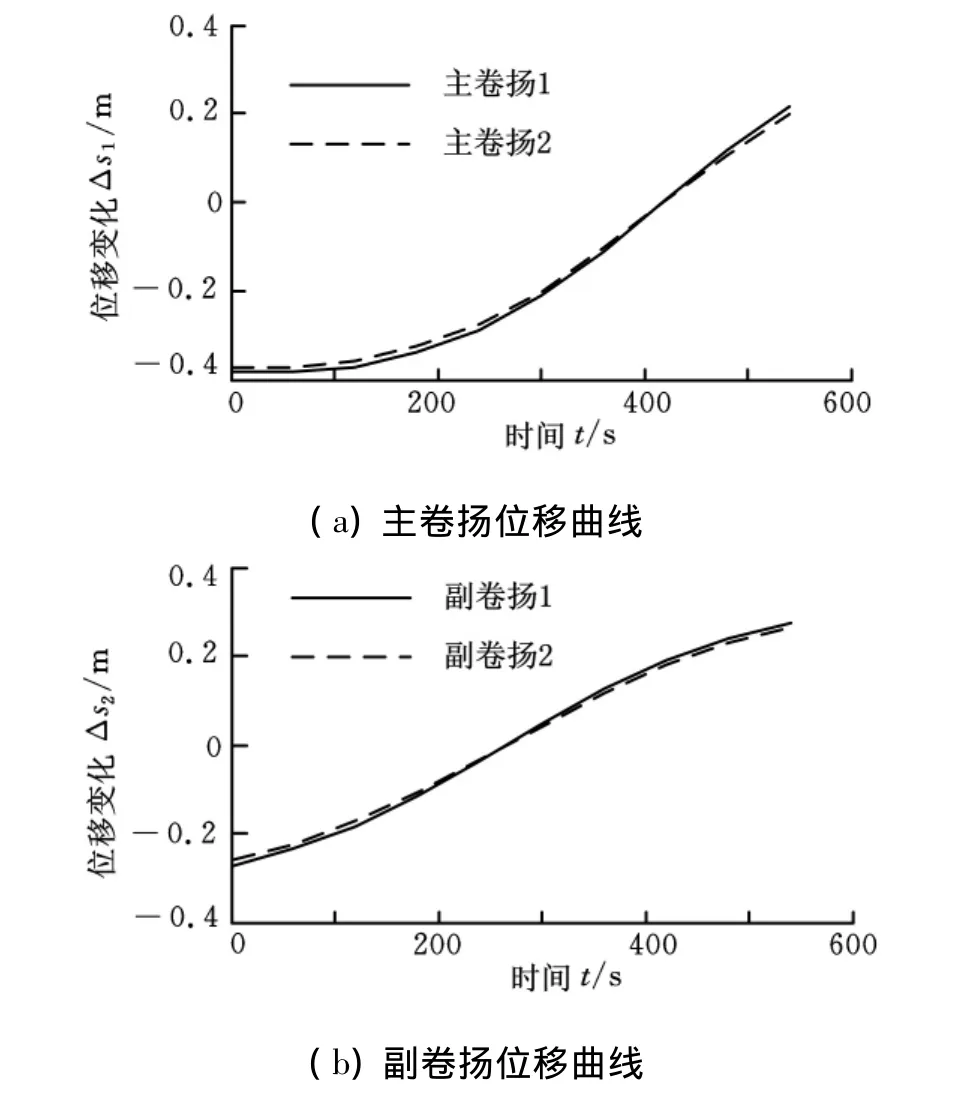
圖4 卷?yè)P(yáng)位移變化曲線
2 液壓回路AMESim建模
在AMESim環(huán)境下,根據(jù)道路清障車的實(shí)際起升回路[18],建立其扶正系統(tǒng)電液伺服模型,單個(gè)卷?yè)P(yáng)液壓回路模型如圖5所示。模型主要參數(shù)設(shè)定見(jiàn)表1。
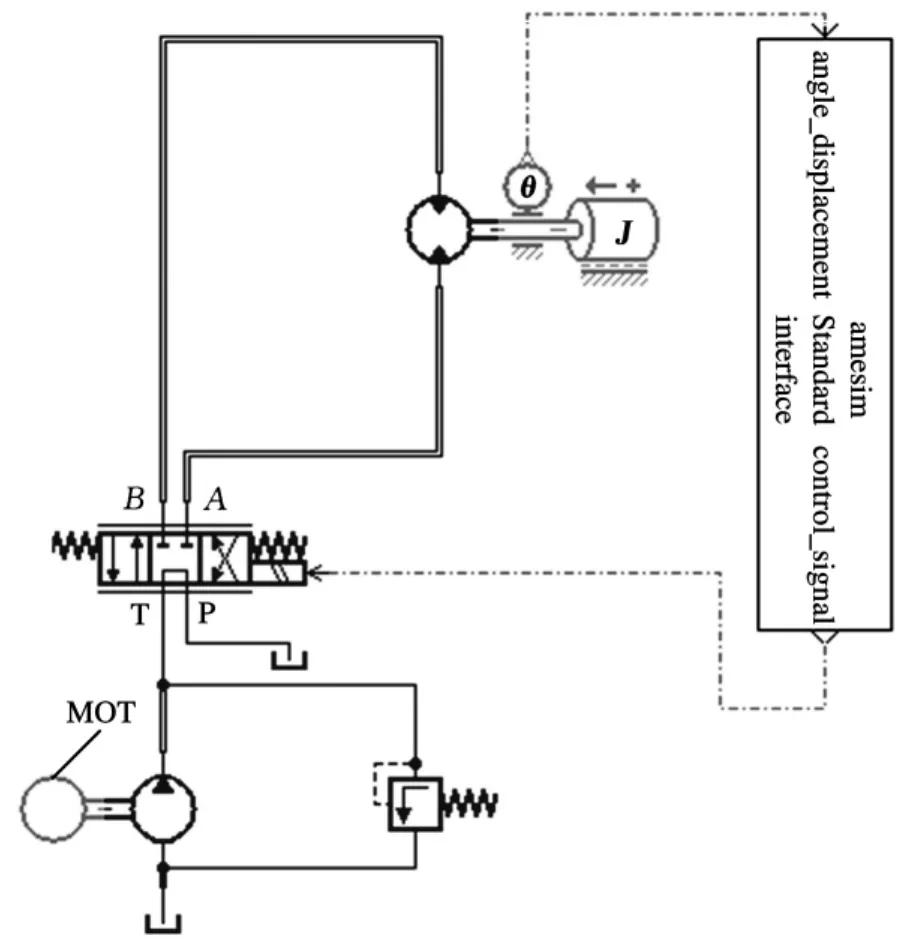
圖5 基于AMESim的道路清障車扶正系統(tǒng)仿真模型
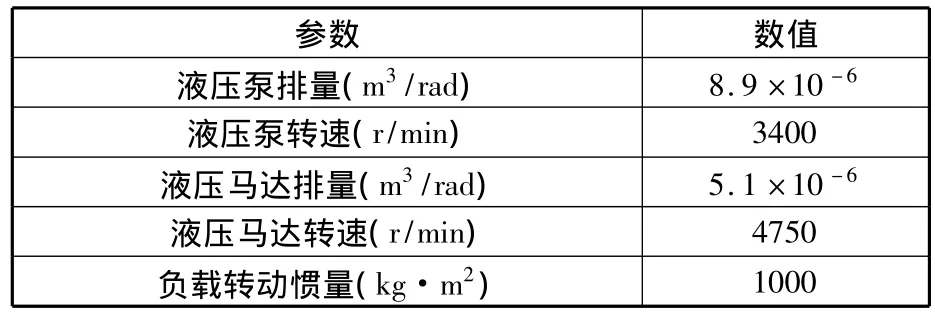
表1 重要液壓元件參數(shù)
3 AMESim與MATLAB聯(lián)合仿真
工程實(shí)踐中,經(jīng)常采用常規(guī)PID控制。常規(guī)PID控制中,Kp、Ki、Kd根據(jù)對(duì)象模型或動(dòng)態(tài)響應(yīng)曲線進(jìn)行整定[19]。變參數(shù)PID控制器將Kp、Ki、Kd取為偏差E的函數(shù)。根據(jù)偏差E的大小,實(shí)時(shí)改變這3個(gè)系數(shù),加快對(duì)小偏差的反應(yīng),提高控制器對(duì)干擾的靈敏度,出現(xiàn)干擾時(shí)及時(shí)調(diào)節(jié)[20]。
VAPID控制算法的參數(shù)調(diào)整公式如下:
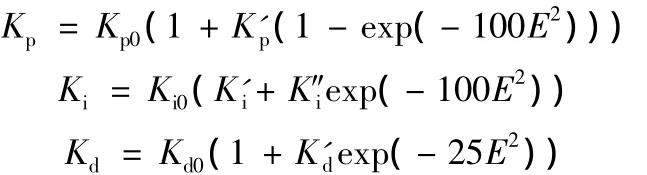
通過(guò)設(shè)置環(huán)境變量等,MATLAB可以實(shí)現(xiàn)與AMESim 的聯(lián)合仿真[21]。在 MATLAB/Simulink環(huán)境中,分別搭建常規(guī)PID與VAPID控制系統(tǒng)。系統(tǒng) Simulink模塊見(jiàn)圖 6、圖 7,其中,AMESim Model模塊為AMESim中經(jīng)過(guò)系統(tǒng)編譯、參數(shù)設(shè)置等生成供Simulink使用的S函數(shù)。圖7中封裝的VAPID模塊內(nèi)部組成如圖8所示。
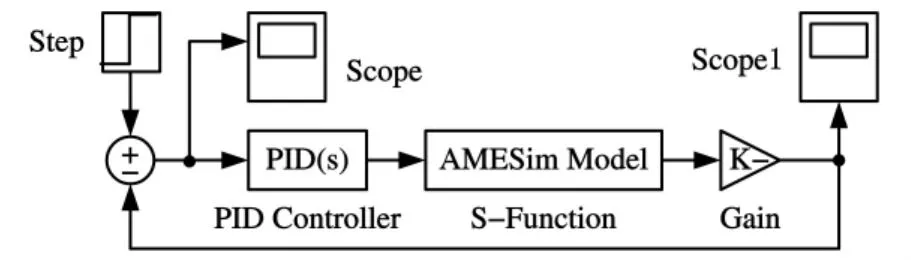
圖6 常規(guī)PID控制系統(tǒng)Sim ulink模塊圖
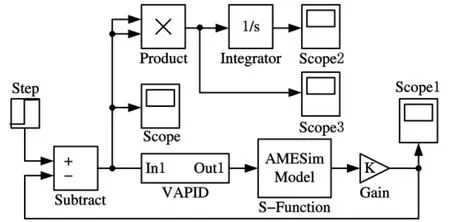
圖7 VAPID控制系統(tǒng)Sim ulink模塊圖
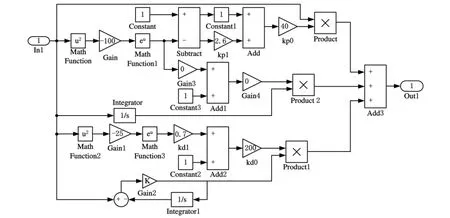
圖8 VAPID Sim ulink模塊圖
常規(guī)PID與VAPID階躍響應(yīng)曲線如圖9所示。將輸入信號(hào)由階躍信號(hào)改為4個(gè)卷?yè)P(yáng)實(shí)際位移變化曲線,仿真得到的跟蹤誤差見(jiàn)圖10。
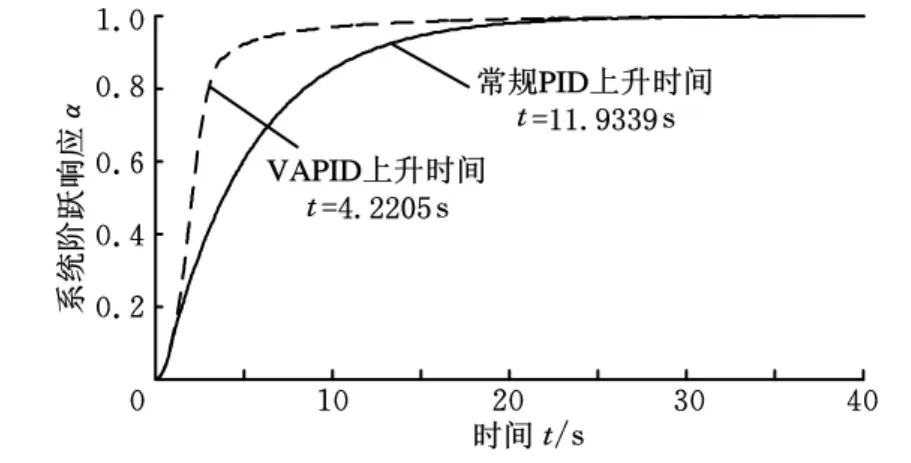
圖9 階躍響應(yīng)曲線
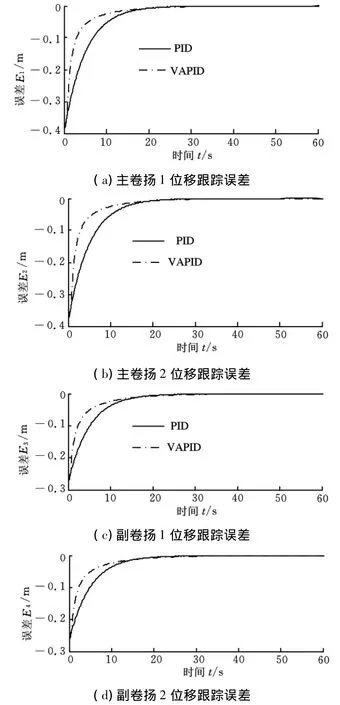
圖10 位移跟蹤誤差

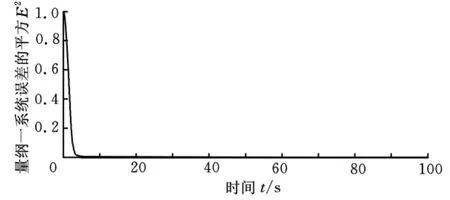
圖11 系統(tǒng)誤差E2(t)曲線
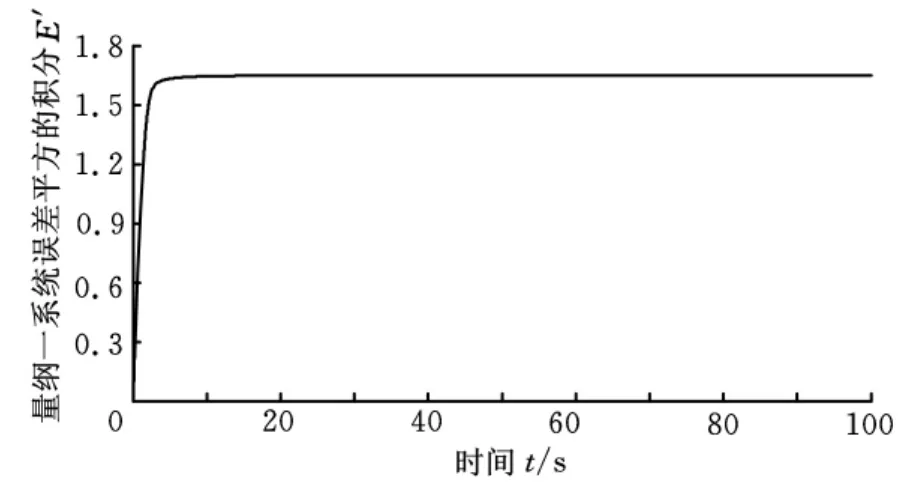
圖12 系統(tǒng)誤差E2(t)的積分
由階躍響應(yīng)曲線及跟蹤誤差曲線可知:
(1)從仿真結(jié)果來(lái)看,常規(guī)PID也可以實(shí)現(xiàn)系統(tǒng)的穩(wěn)定,但是利用VAPID控制,不僅能保證系統(tǒng)穩(wěn)定,而且能使系統(tǒng)的階躍響應(yīng)更快,到達(dá)穩(wěn)態(tài)的時(shí)間更短,基本無(wú)超調(diào)。
(2)在跟蹤道路清障車各卷?yè)P(yáng)位移時(shí),VAPID控制的系統(tǒng)跟蹤誤差比常規(guī)PID控制的系統(tǒng)跟蹤誤差衰減更快,且系統(tǒng)誤差無(wú)回調(diào)現(xiàn)象,可以實(shí)現(xiàn)事故車輛的平穩(wěn)扶正。
(3)在仿真過(guò)程中,VAPID控制比常規(guī)PID控制增加了3個(gè)參數(shù),但設(shè)置并不復(fù)雜,能夠使得控制效果提升明顯。
4 結(jié)論
(1)建立了道路清障車扶正模型。通過(guò)扶正模型,只需確定事故車輛前懸長(zhǎng)度、后懸長(zhǎng)度、軸距及清障救援車作業(yè)位置等參數(shù),即可獲得控制對(duì)象的變化規(guī)律。(2)利用AMESim軟件建立了道路清障車扶正系統(tǒng)的液壓回路模型,分別采用VAPID與常規(guī) PID算法進(jìn)行了扶正控制,在MATLAB/Simulink環(huán)境中進(jìn)行了仿真分析。仿真結(jié)果表明,VAPID相對(duì)于常規(guī)PID控制算法,在跟蹤各卷?yè)P(yáng)實(shí)際位移時(shí),誤差衰減更快,且基本無(wú)超調(diào)現(xiàn)象出現(xiàn),可以實(shí)現(xiàn)事故車輛的自動(dòng)平穩(wěn)快速扶正。研究結(jié)果為增強(qiáng)道路清障救援行業(yè)自動(dòng)化水平、提高救援效率奠定了理論研究基礎(chǔ)。(3)在實(shí)際情況中,車輛外形各式各樣,事故對(duì)車輛外形的影響也不盡相同,本文將車輛側(cè)翻后理想化為長(zhǎng)方體剛體只是其中較為典型的事故形態(tài)。對(duì)于其他如混凝土車等車輛的扶正,需要根據(jù)實(shí)際情況進(jìn)行建模和理論分析。
[1]張占國(guó).重型清障車吊臂和托架強(qiáng)度剛度的有限元分析研究[D].長(zhǎng)春:吉林大學(xué),2005.
[2]張占國(guó),周金來(lái).重型清障車吊臂結(jié)構(gòu)模態(tài)有限元分析[J].工程機(jī)械,2007,38(12):34-39.
Zhang Zhanguo,Zhou Jinlai.Finite Element Analysis in Boom Structural Mode of Heavy Barrier-clearing Vehicle[J].Construction Machinery and Equipment,2007,38(12):34-39.
[3]張占國(guó),于畔光.拖吊分離型清障車拖架有限元模態(tài)分析[J].北華大學(xué)學(xué)報(bào)(自然科學(xué)版),2010,11(5):449-452.
Zhang Zhanguo,Yu Panguang.Finite Element Modal Analysis for Bracket of the Bracing-h(huán)oisting Separated Barrier- clearing Vehicle[J].Journal of Beihua University(Natural Science),2010,11(5):449-452.
[4]王書(shū)賢.汽車交通事故模式分析與救援車輛的研究開(kāi)發(fā)[D].武漢:武漢理工大學(xué),2007.
[5]樂(lè)韻斐,施俊俊,王臨春.可折疊式道路清障車的機(jī)構(gòu)設(shè)計(jì)及優(yōu)化[J].現(xiàn)代制造工程,2010(3):115-118.
Le Yunfei,Shi Junjun,Wang Linchun.Mechanism Design and Optimization of the Road FoldableWrecker[J].Modern Manufacturing Engineering,2010(3):115-118.
[6]湯辛華.清障車:一種經(jīng)濟(jì)實(shí)用的操縱機(jī)構(gòu)[J].商用汽車,2008(1):102-103.
Tang Xinhua.Introduction of Several Operating Methods of Hydraulic Pressure Systems of Wrecker[J].Commercial Vehicle,2008(1):102-103.
[7]湯辛華.道路清障車感應(yīng)式隨動(dòng)托舉裝置[J].專用汽車,2006(5):13-14.
Tang Xinhua.Induced Servo Lift- up Equipment of Wrecker[J].Special Purpose Vehicle,2006(5):13-14.
[8]于睿坤,李萬(wàn)莉,周奇才.工程起重機(jī)伸縮臂控制回路動(dòng)態(tài)模型與仿真[J].中國(guó)機(jī)械工程,2006,17(23):2457-2460.
Yu Ruikun,LiWanli,Zhou Qicai.Dynamic Model and Simulation of Crane Telescopic Boom Control Circuit[J].China Mechanical Engineering,2006,17(23):2457-2460.
[9]王宜華.現(xiàn)代大型液壓起重機(jī)起升性能研究[D].大連:大連理工大學(xué),2006.
[10]安振偉.中小型液壓起重機(jī)起升系統(tǒng)仿真研究[D].長(zhǎng)春:吉林大學(xué),2008.
[11]張啟君.清障車市場(chǎng)情況及發(fā)展簡(jiǎn)析[J].商用汽車,2007(1):85-87.
Zhang Qijun.Analysis of the Road- block Removal Truck Market and Its Development[J].Commercial Vehicle,2007(1):85-87.
[12]李忠生.國(guó)內(nèi)清障車的技術(shù)現(xiàn)狀及發(fā)展趨勢(shì)[J].商用汽車,2003(11):50-51.
Li Zhongsheng.Domestic Technical Status and Developing Trend of Wrecker[J].Commercial Vehicle,2003(11):50-51.
[13]寧文祥.國(guó)外清障車救援實(shí)例展示[J].專用汽車,2010(3):35-36.
Ning Wenxiang.Foreign Wrecker Rescue Examples Show[J].Special Purpose Vehilce,2010(3):35-36.
[14]Olsen R.Teamwork Can Save Lives[J].On Call 24/7,2008,4(1):12.
[15]Luciano T.A Steep Challenge[J].On Call 24/7,2008,4(2):21-23.
[16]Luciano T.Different Conditions May Require You to“Think Out of the Box”[J].On Call 24/7,2008,4(3):6-8.
[17]王慶豐,魏建華,吳根茂,等.工程機(jī)械液壓控制技術(shù)的研究進(jìn)展與展望[J].機(jī)械工程學(xué)報(bào),2003,39(12):51-56.
Wang Qingfeng,Wei Jianhua,Wu Maogen,et al.Progress and Prospects in the Research of Hydraulic Control for Construction Machinery[J].Chinese Journal of Mechanical Engineering,2003,39(12):51-56.
[18]沈全興.液壓傳動(dòng)與控制[M].北京:國(guó)防工業(yè)出版社,2010.
[19]Rovira A A,Murrill P W,Smith C L.Tuning Controllers for Set- point Changes[J].Instruments and Control Systems,1969,42(12):67-76.
[20]鐘慶昌,謝劍英,李輝.變參數(shù)PID控制器[J].信息與控制,1999(8):273-277.
Zhong Qingchang,Xie Jianying,Li Hui. PID Controller with Variable Arguments[J].Information and Control,1998(8):273-277.
[21]陳娟娟.基于AMESim的靜液傳動(dòng)車輛驅(qū)動(dòng)系統(tǒng)控制及仿真[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[22]Slotine J- JE,LiWeiping.Applied Nonlinear Control[M].Upper Saddle River,New Jersey,USA:Prentice Hall,1991.
[23]閔穎穎,劉允剛.Barbalat引理及其在系統(tǒng)穩(wěn)定性分析中的應(yīng)用[J].山東大學(xué)學(xué)報(bào)(工學(xué)版),2007,37(1):51-55.
Min Yingying,Liu Yungang.Barbalat Lemma and Its Application in Analysis of System Stability[J].Journal of Shandong University (Engineering Science),2007,37(1):51-55.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
