基于結(jié)構(gòu)光的3D激光掃描儀系統(tǒng)研究*
2013-07-25 03:19:16萬韜阮
微處理機 2013年2期
林 靜,湯 汶,2,萬韜阮,3
(1.西安工程大學電子信息學院,西安710048;2.英國提塞德大學計算機學院,英國TS1 3BA;3.英國布拉德福德大學信息學院,英國BD7 1DP)
1 引言
在三維重建過程中,要想得到高精度的三維模型,需要獲得目標物體幾萬個,甚至幾百萬個以上的高精度三維坐標點。而基于單點精度測量的傳統(tǒng)測繪技術(shù)在數(shù)據(jù)數(shù)量上很難滿足這個要求。三維激光掃描技術(shù)可以很好地解決這一難題。它是一種能夠直接獲取被測物體深度信息的高新技術(shù),能夠全自動高精度地直接對目標物體進行激光掃描,然后將各種復(fù)雜的目標實物的三維數(shù)據(jù)完整地采集到電腦中,從而快速地重建出三維物體模型。
由于三維激光掃描儀能夠快速獲取目標景物的深度信息,簡單快捷,同時能夠有效地恢復(fù)出真實準確的三維模型,因此,基于激光掃描技術(shù)的三維重建研究成為近年來的研究熱點[1-2]。目前,已有多種三維激光掃描儀產(chǎn)品被開發(fā)出來投放到市場,比如,Polhcmus公司研制的Fastscan掃描儀,MENSI公司出品的S25系列三維激光掃描儀等等。基于不同的原理所研制出來的掃描儀,有不同的適用范圍和技術(shù)特點,比如有的適合長距離的室外使用,有的適合短距離的室內(nèi)使用等。但這些三維激光掃描儀卻有一個共同的缺點即價格昂貴,不利于大范圍的推廣。
2 方法
2.1 原理
文中所研究的激光掃描系統(tǒng)主要是基于結(jié)構(gòu)光法,將一字狀激光投射到待掃描的物體上形成光條紋,再由相機獲取物體上的光條紋,并對條紋中心進行提取,然后由相機與光源的相對位置,通過三角法和計算機視覺理論[3],計算出被照射點的三維坐標。激光三角測距原理圖如圖1所示。在圖中,L表示物體和激光器之間的距離;d表示激光器中心和攝像頭中心距離;f表示攝像頭的焦距;β表示激光器的夾角;x表示待測物體上激光光點在攝像頭感光元件上的成像到一側(cè)邊緣的距離。要求得L,可由如下公式求得:
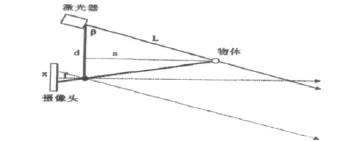
圖1 激光三角測距原理圖


其中,β,d,f,在測距設(shè)備安裝后就固定不變,數(shù)值為已知。x可以通過在攝像頭畫面中查找并計算激光點中心位置的像素坐標來求得。這樣即可求得被掃描物體和激光器之間的距離L。以上介紹的是基于單點的三角測距原理,3D激光掃描原理采用類似的方式進行擴充。
2.2 系統(tǒng)流程
該系統(tǒng)由一個標定板、一臺PC電腦和一個網(wǎng)絡(luò)攝像頭及一個一字線狀激光器組成。首先對標定背景進行設(shè)置,然后對相機進行標定,最后讓激光線劃過被掃描物體進行數(shù)據(jù)采集。
3 系統(tǒng)具體實現(xiàn)
3.1 設(shè)置標定背景
在相機標定之前,由傳統(tǒng)的標定方法可知采用三維標定系統(tǒng)的直接線性法[4]及Tsai的兩步法[5],要求標定板是立體的,即兩塊標定板必須正交。如圖2所示,Simon Winkelbach和Sven Molenstruck研制出的DAVID三維激光掃描儀系統(tǒng)所采用的手工制作標定板如圖3所示,介于實際手工制作的繁瑣及很難保證完全的正交,而利用實驗桌角的正交性,直接將貼有標志點的紙張貼到桌角,如圖4所示。

圖2 正交的標定背景
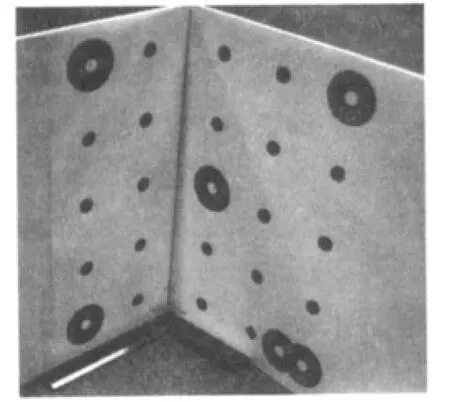
圖3 正交的標定背景
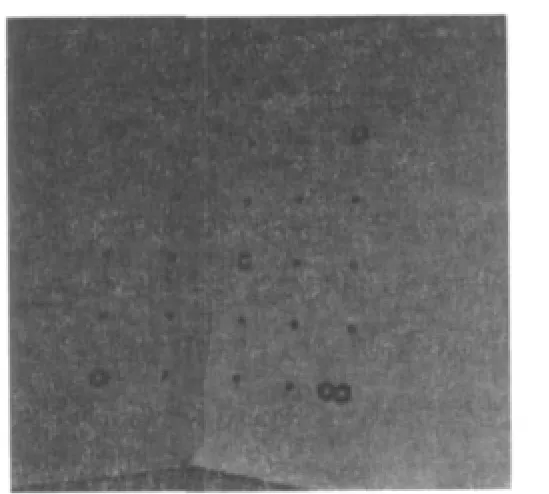
圖4 正交的標定背景
3.2 相機標定
設(shè)置好標定板后,對相機進行標定。相機標定的目的是求得相機的內(nèi)外參數(shù)。因為空間物體表面上的一點P(x,y,z)與物體相應(yīng)圖像上的一點p(u,v)是由相機模型決定的,而這些模型參數(shù)稱為相機參數(shù)。它們的轉(zhuǎn)換關(guān)系為:

其中P為內(nèi)外參數(shù)求得的標定矩陣。標定過程中,采用DAVID系統(tǒng)提供的免費軟件,標定過程如圖5所示。

圖5 相機標定
3.3 數(shù)據(jù)采集
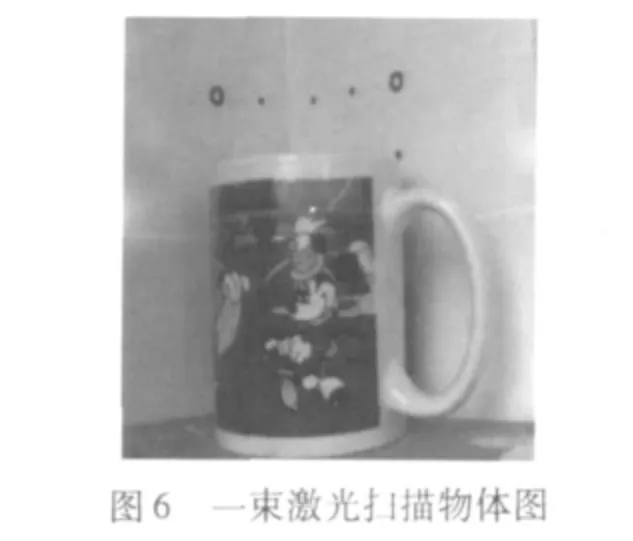
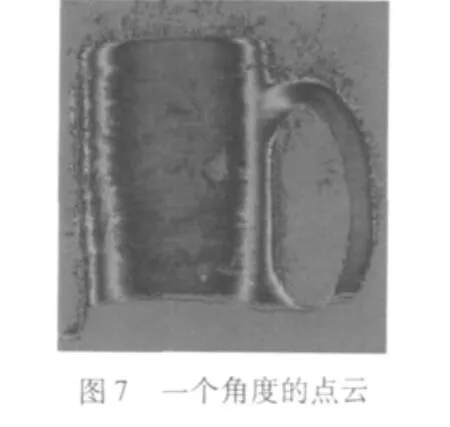
將被掃描物體放在桌角前面的空位置上,同時攝像頭的位置保持不動,手持線激光發(fā)射器對被掃描物體進行上下掃描,攝像頭對此過程進行拍攝,同時,與攝像頭相連的pc機上的軟件系統(tǒng)同步處理攝像頭所采集的每一幀圖像,如圖6所示。通過上面的處理,可以得到被掃描物體的一個曲面點云,如圖7所示。
4 實驗結(jié)果及分析
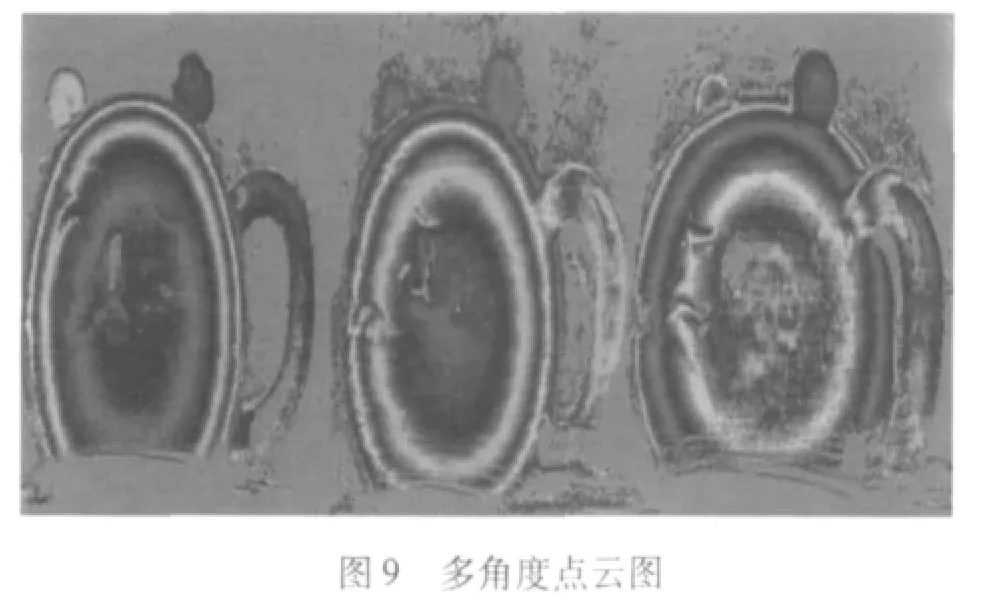
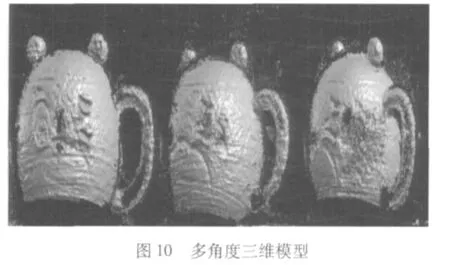
將被掃描物旋轉(zhuǎn)一個角度,重復(fù)上面的步驟,可得到被掃描物體另外一個角度上的曲面點云。通過多次旋轉(zhuǎn),如圖8所示,多次重復(fù)上面的掃描過程,可獲得被掃描物體不同方向上的曲面點云,如圖9所示,所得的各個角度的三維模型如圖10所示。
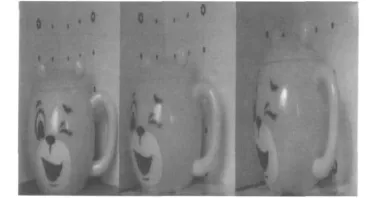
圖8 多角度原圖
在激光掃描過程中,掃描質(zhì)量的好壞和激光光源及測量環(huán)境有很重要的關(guān)系,比如反射率較低的待測物體表面,會直接導致光條很暗等。
5 結(jié)束語
該研究從傳統(tǒng)的激光掃描儀價格昂貴難以普及這一缺點出發(fā),借鑒了DAVID三維激光掃描儀系統(tǒng)的相關(guān)方法,基于激光3D掃描儀的相關(guān)原理,利用常見的攝像頭及線狀激光器和pc機搭建了一個低成本的激光掃描系統(tǒng)。雖然本系統(tǒng)只適合短距離小件物體的掃描,但已使得激光掃描系統(tǒng)更加的平民化,也使大家能夠進行自制三維模型的體驗。
為了獲得更精確完整的三維模型,需要采用相關(guān)的點云匹配算法,將這些曲面點云匹配成一個完整的三維模型點云,這也是下一步的工作重點。
[1] 王曉南,鄭順義.基于激光掃描和高分辨率影像的文物三維重建[J].測繪工程,2009,18(6):53-57.
[2] 王茹.古建筑數(shù)字化及三維建模關(guān)鍵技術(shù)研究[D].西安:西北大學,2010,06.
[3] M POTMESIL.Generating Models of Solid Objects by Matching 3D Surface Segments:Proceedings 8th International JointConference ArtificialIntelligence[C].Karlsruhe,1983:1089-1093.
[4] J WENG,P COHEN,M HCRNIOU.Calibration of Stereo Cameras Using a Non-linearDistortion Model[J].Proceedings International Conference on Pattern Recognition,1990:246-253.
[5] TSAI R.A versatile camera calibration technique for high-accuracy 3D Machinevision metrology using offshelf TV cameras and lenses[J].IEEE Journal of Robotics and Automation.1987,3(4):323-344.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
