基于混合粒子群優(yōu)化算法的多彈協(xié)同航跡規(guī)劃
2013-08-09 05:38:14李帆郝博萬(wàn)聰梅趙建輝薛蕾
飛行力學(xué) 2013年1期
關(guān)鍵詞:規(guī)劃
李帆,郝博,萬(wàn)聰梅,趙建輝,薛蕾
(北京航空航天大學(xué)儀器科學(xué)與光電工程學(xué)院,北京100191)
0 引言
多彈協(xié)同航跡規(guī)劃是實(shí)現(xiàn)多彈低空突防的關(guān)鍵環(huán)節(jié)。單枚導(dǎo)彈作戰(zhàn)時(shí),其作戰(zhàn)范圍、殺傷半徑、摧毀能力及攻擊精度等方面受到很多限制[1],而多彈協(xié)同作戰(zhàn)相對(duì)單枚導(dǎo)彈可提高作戰(zhàn)成功率。多彈協(xié)同低空突防航跡規(guī)劃是指在綜合考慮導(dǎo)彈機(jī)動(dòng)性能、突防概率、碰地概率和飛行時(shí)間等約束下,為導(dǎo)彈設(shè)計(jì)出既滿足團(tuán)隊(duì)時(shí)間協(xié)同要求,又使整體生存概率最大的飛行航跡。
無(wú)論是離線還是在線,多彈協(xié)同航跡規(guī)劃比單枚導(dǎo)彈航跡規(guī)劃要復(fù)雜得多,文獻(xiàn)[2]提出采用分解策略,將航跡規(guī)劃總體結(jié)構(gòu)分為航跡規(guī)劃層、協(xié)同規(guī)劃層和航跡平滑層。目前關(guān)于多彈協(xié)同離線和在線航跡規(guī)劃算法的研究不多,文獻(xiàn)[3]用Voronoi圖法在威脅環(huán)境建模的基礎(chǔ)上采用遺傳算法進(jìn)行離線航跡規(guī)劃,但該方法規(guī)劃出來的是二維幾何路徑,不滿足導(dǎo)彈機(jī)動(dòng)性能要求,且Voronoi圖必須隨時(shí)更新,耗時(shí)長(zhǎng),不能用于彈上實(shí)時(shí)航跡規(guī)劃。文獻(xiàn)[4]采用協(xié)同進(jìn)化算法規(guī)劃出三維離線航跡,此外還有蟻群算法[5]、3DSAS 算法[6],但這些算法所需參數(shù)較多,比較復(fù)雜。
本文采用分解策略將多彈協(xié)同航跡規(guī)劃總體結(jié)構(gòu)分為兩層:航跡規(guī)劃層與協(xié)同規(guī)劃層。與文獻(xiàn)[2]不同的是,沒有航跡平滑層,因?yàn)樵诤桔E規(guī)劃層,本文將K均值聚類算法、小生境算法、模擬退火(SA)算法[7]引入粒子群優(yōu)化(PSO)算法中,提出混合粒子群優(yōu)化(HPSO)算法來規(guī)劃多條備選航跡,與遺傳算法相比,該算法無(wú)需大量的參數(shù)和繁瑣的步驟,所規(guī)劃的航跡平緩,滿足導(dǎo)彈機(jī)動(dòng)性能要求,不需要進(jìn)行平滑計(jì)算,且可分別進(jìn)行離線和在線航跡規(guī)劃。
1 實(shí)現(xiàn)方案
多彈協(xié)同航跡規(guī)劃流程如圖1所示。首先進(jìn)行威脅建模;然后進(jìn)行離線規(guī)劃,航跡規(guī)劃層為每枚導(dǎo)彈規(guī)劃出各自的多條備選航線;協(xié)同規(guī)劃層根據(jù)協(xié)同時(shí)間為每枚導(dǎo)彈選出使導(dǎo)彈編隊(duì)代價(jià)最小的航跡和導(dǎo)彈速度。當(dāng)導(dǎo)彈根據(jù)離線規(guī)劃的航跡飛行遇到突發(fā)威脅時(shí),則以當(dāng)前位置為起始點(diǎn),進(jìn)行在線協(xié)同航跡規(guī)劃。這種分解策略的優(yōu)點(diǎn)在于通過簡(jiǎn)單有效的協(xié)同時(shí)間,把一個(gè)復(fù)雜的高維優(yōu)化問題分解成一個(gè)計(jì)算量小的低維問題,從而大大降低了導(dǎo)彈之間信息傳輸量,提高了整個(gè)系統(tǒng)的效率。
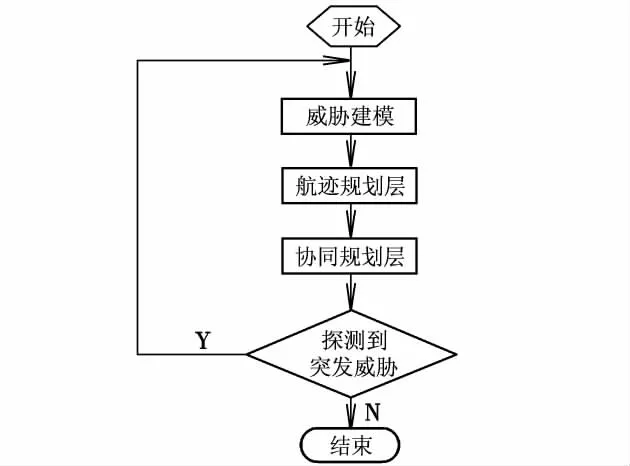
圖1 多彈協(xié)同航跡規(guī)劃流程圖
2 威脅建模
本文采用的最小威脅曲面模型如下:

式中,T(x,y)為威脅信息;f(x,y)為地形信息,設(shè)置最小離地高度為0.05 km以避免巡航導(dǎo)彈低空飛行時(shí)撞擊地面。T(x,y)采用山峰威脅建模方法:
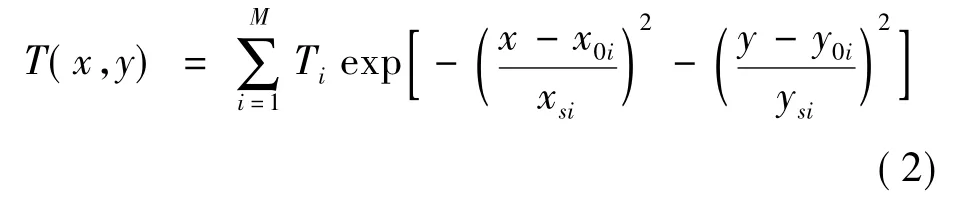
式中,Ti,(x0i,y0i),(xsi,ysi)分別為山峰模擬算法參數(shù)中的峰高、山峰中心、峰衰減系數(shù)。
3 航跡規(guī)劃層
航跡規(guī)劃層的目的是規(guī)劃出多條備選航跡,文獻(xiàn)[8]提出采用PSO算法來進(jìn)行多航跡的規(guī)劃,但PSO算法易陷入局部最優(yōu)、進(jìn)化后期收斂速度慢。文獻(xiàn)[9]提出將SA算法引入PSO算法,以提高PSO算法全局搜索的能力,故本文將兩種算法結(jié)合形成PSOSA算法,并總結(jié)出算法流程圖如圖2所示。
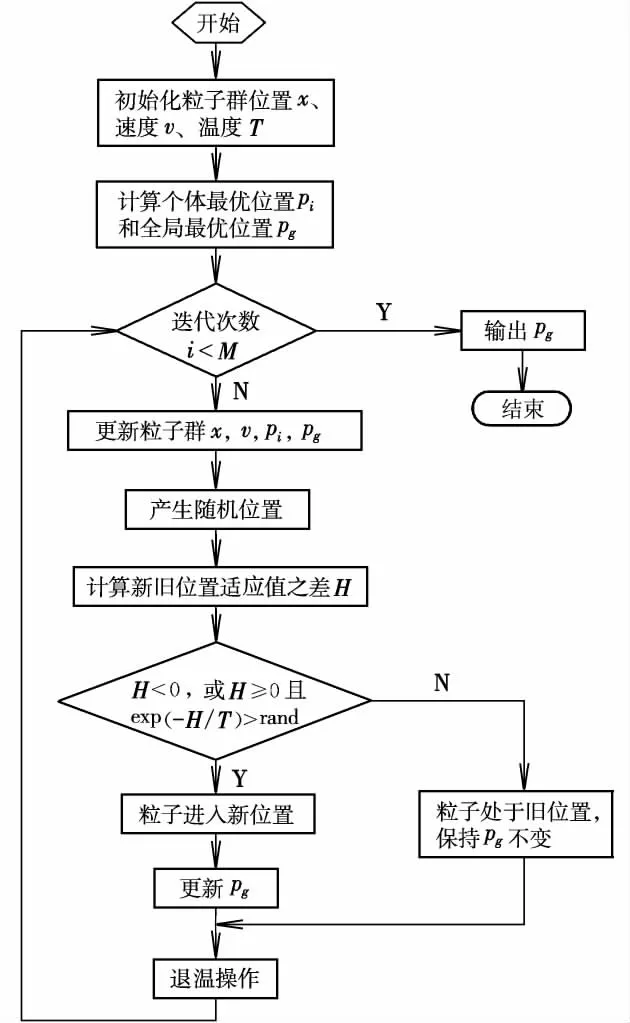
圖2 PSOSA算法流程圖
多航跡規(guī)劃要求生成的航跡在空間上不應(yīng)聚集在一起,本文采用小生境算法來解決此問題,同時(shí)為保證所有小生境子種群在空間上隔離,先采用K均值聚類算法對(duì)所有粒子進(jìn)行一次聚類,每個(gè)個(gè)體只在各自的子種群中利用PSOSA算法獨(dú)立進(jìn)化,最后,每個(gè)子種群將分別生成一條最優(yōu)航跡。將K均值聚類算法、小生境算法與PSOSA算法結(jié)合,所得HPSO算法流程如圖3所示。
4 協(xié)同規(guī)劃層
航跡規(guī)劃層為每枚導(dǎo)彈規(guī)劃出了多條最優(yōu)、次優(yōu)航跡,將其傳給協(xié)同規(guī)劃層。協(xié)同規(guī)劃層首先選擇每枚導(dǎo)彈對(duì)應(yīng)的最優(yōu)航跡,假設(shè)導(dǎo)彈速度的變化范圍為V∈[Vmin,Vmax],設(shè)第i枚導(dǎo)彈的最優(yōu)航跡長(zhǎng)為 Li,則此航跡對(duì)應(yīng)飛行時(shí)間 ti∈[Li/Vmax,Li/Vmin];然后求出所有導(dǎo)彈時(shí)間集合的交集S=t1∩t2∩…∩tN,在戰(zhàn)爭(zhēng)中,導(dǎo)彈飛行時(shí)間越短越好,故所有導(dǎo)彈到達(dá)時(shí)間(即協(xié)同時(shí)間)ETA定義為:ETA=min(S);最后協(xié)同規(guī)劃層根據(jù)ETA和每枚導(dǎo)彈的最優(yōu)航跡求出對(duì)應(yīng)速度。如果所有導(dǎo)彈按各自的最優(yōu)航跡計(jì)算出來的到達(dá)時(shí)間集合沒有交集,則協(xié)同規(guī)劃層從飛行航跡代價(jià)最小的導(dǎo)彈開始,依次選擇某幾個(gè)導(dǎo)彈按次優(yōu)甚至更次優(yōu)的航跡計(jì)算S,直到每枚導(dǎo)彈到達(dá)目標(biāo)的時(shí)間集合有交集為止。協(xié)同規(guī)劃層流程圖如圖4所示。

圖3 HPSO算法流程圖
5 仿真實(shí)驗(yàn)
情形一:3枚導(dǎo)彈對(duì)一個(gè)固定的敵方目標(biāo)從不同方向?qū)嵤┕簟R笏袑?dǎo)彈同時(shí)到達(dá),以減小被擊中的概率。基本參數(shù)設(shè)置:粒子數(shù)為40,搜索空間為3維,迭代次數(shù)為400。仿真數(shù)據(jù)如表1所示,所規(guī)劃航跡如圖5所示。可見該算法能夠得到3條空間上相距比較遠(yuǎn)的航跡,取得了較好的規(guī)避效果,以相同的時(shí)間不同的突防角度進(jìn)入,提高了打擊成功率。
表1 3枚導(dǎo)彈攻擊1個(gè)目標(biāo)的仿真數(shù)據(jù)
圖5 3枚導(dǎo)彈攻擊1個(gè)目標(biāo)的離線航跡圖
情形二:3枚導(dǎo)彈攻擊3個(gè)目標(biāo),假設(shè)航跡規(guī)劃之前已為每枚導(dǎo)彈分配好了固定目標(biāo),同樣要求所有導(dǎo)彈同時(shí)到達(dá)目標(biāo)。仿真數(shù)據(jù)如表2所示,所規(guī)劃航跡如圖6所示,3枚導(dǎo)彈以相同的時(shí)間不同的突防角度到達(dá)不同的目標(biāo),成功實(shí)現(xiàn)了突防。
表2 3枚導(dǎo)彈攻擊3個(gè)目標(biāo)離線仿真數(shù)據(jù)
情形三:當(dāng)導(dǎo)彈飛行過程中遇到突發(fā)威脅時(shí),需要進(jìn)行多彈協(xié)同在線航跡規(guī)劃,重新確定規(guī)劃起點(diǎn),航跡終點(diǎn)和突防進(jìn)入方位角不變。仿真數(shù)據(jù)如表3所示,所規(guī)劃航跡如圖7所示,和圖6比較新增加了3個(gè)突發(fā)威脅,可見導(dǎo)彈重規(guī)劃部分成功地對(duì)新出現(xiàn)的威脅進(jìn)行了規(guī)避,規(guī)劃效果基本滿足導(dǎo)彈任務(wù)需求。
圖6 3枚導(dǎo)彈攻擊3個(gè)目標(biāo)的離線航跡圖

表3 3枚導(dǎo)彈攻擊3個(gè)目標(biāo)在線規(guī)劃仿真數(shù)據(jù)
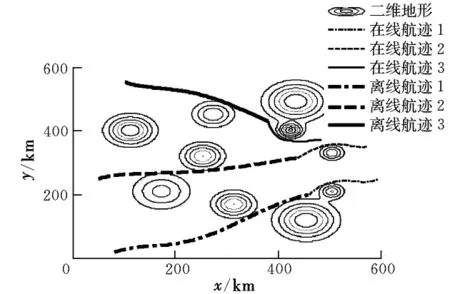
圖7 3枚導(dǎo)彈攻擊3個(gè)目標(biāo)的在線航跡圖
圖8給出了情形一的航跡高度曲線,可以看到三條航跡高度均不過100 m,在超低空飛行的范圍內(nèi),可減小被雷達(dá)探測(cè)到的概率,增強(qiáng)導(dǎo)彈的突防能力,且彈道平緩,可使過載較小,節(jié)省燃料。
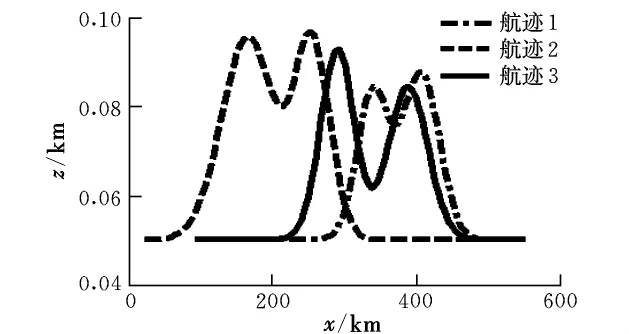
圖8 3枚導(dǎo)彈攻擊1個(gè)目標(biāo)的高度曲線
6 結(jié)束語(yǔ)
本文提出了HPSO算法,并將其成功地用于多彈協(xié)同低空突防航跡規(guī)劃。采用分解策略將多彈協(xié)同航跡規(guī)劃總體結(jié)構(gòu)分為兩層:航跡規(guī)劃層和協(xié)同規(guī)劃層。在航跡規(guī)劃層提出HPSO算法以規(guī)劃出多條在空間上較為離散的備選航跡,協(xié)同規(guī)劃層根據(jù)協(xié)同時(shí)間為每枚導(dǎo)彈選出合適的航跡和速度,當(dāng)導(dǎo)彈遇到突發(fā)威脅時(shí),則以當(dāng)前位置為起點(diǎn)重新規(guī)劃航跡。最后以3枚導(dǎo)彈為例,針對(duì)單目標(biāo)和3個(gè)目標(biāo)進(jìn)行了離線和在線仿真驗(yàn)證,均生成了滿足協(xié)同時(shí)間要求的航跡,且所得航跡彈道平緩。
[1]樊瓊劍,楊忠,方挺,等.多無(wú)人機(jī)協(xié)同編隊(duì)飛行控制的研究現(xiàn)狀[J].航空學(xué)報(bào),2009,30(4):683-691.
[2]毛云云.多飛行器協(xié)同航跡規(guī)劃算法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[3]Eun Yeonju,Bang Hyochoong.Cooperative task assignment/path planning of multiple unmanned aerial vehicles using genetic algorithms[J].Journal of Aircraft,2009,46(1):338-343.
[4]Yan Jiangjiang,Ding Mingyue,Zhou Cheng ping.Cooperative route planning algorithm for unmanned air vehicles based on evolutionary computation[C]//Remote Sensing and GISData Processing and Applications,and Innovative Multi spectral Technology and Applications.United States:SPIE,2007.
[5]Lu Jiangsong,Wang Nan,Chen Jing.Cooperative path planning for multiple UCAVs using an AIS-ACO hybrid approach[C]//2011 International Conference on Electronic and Mechanical Engineering and Information Technology.United States:IEEE Computer Society,2011:4301-4305.
[6]馬培軍,毛云云,張洪濤,等.基于3DSAS的多約束多航跡協(xié)同規(guī)劃與搜索方法[J].系統(tǒng)工程與電子技術(shù),2011,33(7):1527-1533.
[7]Mohammad Mehdi Keikha.Improved simulated annealing using momentum terms[C]//2011 IEEE Second International Conference on Intelligent Systems,Modelling and Simulation.United States:IEEE Computer Society,2011:44-48.
[8]Wang Guoshi,Li Qiang,Guo Lejiang.Multiple UAVs routes planning based on particle swarm optimization algorithm[C]//2010 2nd International Symposium on Information Engineering and Electronic Commerce.United States:IEEE Computer Society,2010:150-154.
[9]Shu Jun,Li Jian.An improved self-adaptive particle swarm optimization algorithm with simulated annealing[C]//Intelligent Information Technology Application,Third International Symposium.United States:IEEE Computer Society,2009:396-399.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國(guó)石油石化(2021年9期)2021-07-17 09:24:00
中國(guó)農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41