雙鋼輪振動壓路機混合動力系統仿真
2013-08-16 13:49:36姚運仕馮忠緒沈建軍陳世斌
吉林大學學報(工學版) 2013年4期
姚運仕,劉 龍,馮忠緒,沈建軍,陳世斌
(1.長安大學 道路施工技術與裝備教育部重點實驗室,西安 710064;2.上海三一科技有限公司研究院,上海 201200)
雙鋼輪振動壓路機是一種往復循環作業式機械。在一個循環中,起步/起振過程約3s,僅占總循環時間的5%,但此動態過程卻需克服較大的整機平動慣性力和激振系統轉動慣性力矩。為了滿足循環時間僅占5%左右的起步/起振過程的功率要求,雙鋼輪振動壓路機的裝機功率必須是穩定壓實過程所需功率的2倍多,造成較大的功率浪費[1-6]。在停振/停車過程,較大的慣性負荷又易造成發動機反拖。因此,實現功率優化匹配、降低功率損失、提高經濟性是雙鋼輪振動壓路機的重要研究方向。
混合動力在節能環保方面顯示出巨大的優勢,許多國家和地區已經把混合動力系統應用在汽車上,并取得了較好的節能效果[7-10]。工程機械混合動力技術的研究和應用得到廣泛關注[11]。混合動力裝載機和混合動力挖掘機具有高效、節能、低排放、低噪聲、低振動等特點[12-14]。
與汽車或鏟土運輸類工程機械不同,雙鋼輪振動壓路機最基本的要求是保證壓實質量。為了進一步提高雙鋼輪振動壓路機的燃油經濟性和作業質量,本文擬根據某雙鋼輪振動壓路機的工作特點和負荷特性進行其混合動力系統的仿真研究,在保證壓實質量的前提下為雙鋼輪振動壓路機的功率匹配和新型節能技術提供參考。
1 混合動力系統要求及特點
為了保證雙鋼輪振動壓路機的壓實質量,其混合動力系統有如下要求和特點:
(1)發動機轉速必須恒定。雙鋼輪振動壓路機液壓傳動系統中發動機與行走變量泵和振動變量泵等直接相連,發動機轉速變化會引起兩個變量泵輸出流量的變化,導致行走速度和振動頻率的波動,從而造成壓實不均勻等的作業質量問題。因此,雙鋼輪振動壓路機不能以低油耗和高生產效率為最高控制目標,而應首要保證發動機轉速恒定。
(2)載荷大小及變化較規律。雙鋼輪振動壓路機是典型的循環往復作業式機械,作業過程的載荷大小及變化較規律,可較準確和方便地預測,有利于優化和簡化控制策略。因此,雙鋼輪振動壓路機可實現荷電維持型混合動力系統,即在一個工作循環前后電池的SOC(State of charge,荷電狀態)保持不變,或滿足<0.05,波動很小。
(3)需求轉矩的預測較準確、簡單。混合動力系統控制策略的重要內容之一是準確預測需求轉矩,這是轉矩分配策略的前提。雙鋼輪振動壓路機的液壓系統壓力直接反映需求轉矩,通過檢測液壓系統壓力和變量泵斜盤位置即可預測需求轉矩。
(4)制動能量回收方便。傳統雙鋼輪振動壓路機停振/停車過程中,行走系統和振動系統較大的慣性負荷成為動力源,液壓馬達和液壓泵角色互換,制動慣性負荷帶動液壓馬達(充當泵)驅動液壓泵(充當馬達)反拖發動機實現制動。若采用混合動力系統,制動過程中液壓泵充當液壓馬達直接驅動電機,只需將電機狀態改為發電模式就可回收制動能量。
現有的汽車或鏟土運輸類工程機械混合動力技術并不能完全適用于雙鋼輪振動壓路機,必須結合其要求和特點予以研究。
2 混合動力系統方案及元件選型
2.1 混合動力系統方案
某雙鋼輪振動壓路機采用全液壓驅動,行走系統和振動系統均為閉式單變量泵雙定量馬達系統,行走變量泵和振動變量泵及輔助系統驅動泵等通過分動箱由發動機驅動。根據串聯式和并聯式混合動力系統兩種結構形式的對比,結合雙鋼輪振動壓路機液壓傳動系統傳動效率低和整機結構布置困難等特點,采用并聯式混合動力系統較合適。
因行走系統與振動系統方案類似,以行走系統為例進行說明。圖1為某雙鋼輪振動壓路機雙軸合成式并聯混合動力系統[15]。與參考文獻[1-5]所述原系統相比增加了電機、動力電池、壓力傳感器、泵斜盤傾角檢測器、轉矩合成裝置等。在電機與轉矩合成裝置之間安裝變速器以調整電機的工作點,若與電控發動機配合還可實現純電動工況。轉矩合成裝置可以采用常嚙合的齒輪、鏈傳動或帶傳動。
兩只壓力傳感器分別檢測系統高壓側與低壓側的壓力,并將檢測結果送入控制器,由控制器計算系統壓差;斜盤傾角檢測器將檢測到的斜盤位置送入控制器并在控制器中轉化為斜盤的排量;控制器通過壓差與排量計算泵傳動軸上的轉矩需求,并根據控制策略向電機發出控制指令,從而實現發動機驅動、混合驅動、充電、能量回收等模式。
2.2 元件選型
考慮起步/起振過程和穩定壓實過程不同的動力性特點,結合壓實作業中須保持發動機恒定轉速的要求,某雙鋼輪振動壓路機行走系統的并聯混合動力系統采用發動機為主、電機為輔的混合驅動方式,發動機在整個壓路機工作、運行過程中連續運行,電機只是在系統功率需求較高時提供輔助動力。原雙鋼輪振動壓路機功率匹配以滿足系統最大組合功率消耗來選擇發動機功率,裝機功率為93kW,而實際穩定工作所需要的功率只占起步/起振過程峰值功率的45%左右,甚至更低。對于混合動力系統而言,發動機功率僅需滿足穩定工作要求即可,動態過程所需功率不足的部分可由電機提供。混合動力系統主要元件選型如下:采用康明斯4BTA3.9-C80發動機,額定功率為60kW,額定轉速為2200r/min;采用永磁同步電機,額定功率為49kW;采用NIMH45鎳氫電池20節,最大功率為60kW,電池組額定電壓為240V,單體指標12V/45Ah。液壓元件與原系統相同。
3 工作模式及控制策略
3.1 工作模式
根據雙鋼輪振動壓路機工作特點和混合動力系統方案分析,將雙鋼輪振動壓路機混合動力系統的發動機與電機工作狀態分為幾個模式:純發動機模式、混合驅動模式、行車充電模式、減速/制動能量回收模式、停車/怠速模式。各工作模式在液壓系統壓力曲線上的位置如圖2所示。考慮壓實作業對速度穩定性的要求,通過控制發動機最大輸出轉矩使其轉速穩定在小范圍內,近似實現發動機恒定工作點控制。

圖2 雙鋼輪振動壓路機混合動力系統工作模式Fig.2 Work modes of parallel hybrid system for tandem vibratory rollers
3.2 控制策略
混合動力系統控制策略的主要目的是將需求轉矩最優地分配給發動機和電機。
根據發動機性能參數、起步/起振峰值功率、穩定壓實功率及輔助系統功率等要求,確定150 N·m為發動機最大輸出轉矩,即在系統需求轉矩小于150N·m時完全由發動機提供,大于150 N·m時不足部分由電機提供。相應的控制策略為:
(1)純發動機模式:在整機起動的初始階段和其穩定工作階段,需求轉矩小于150N·m時,由發動機提供全部的動力:

式中:Tp為液壓泵的需求轉矩,可通過檢測系統壓力與泵斜盤位置計算得到;Te為發動機輸出轉矩;Tm為電機輸出轉矩。
此模式下,當動力電池的SOC低于設定的下限值(即SOC<SOClow)時,切換到充電模式。
(2)混合驅動模式:在整機起動階段的中后期或爬坡等大負荷工況下,當系統的轉矩需求超過發動機提供的最大轉矩限值時,動力電池輸出能量驅動電機提供輔助動力。即,若SOC>SOClow,則:

此模式下,若動力電池的SOC較低,為保護電池不被過度放電,控制電機不工作。為保證系統仍能起動,取消發動機輸出轉矩限值,以提供足夠的轉矩。即,若SOC<SOClow,則:

(3)行車充電模式:當動力電池的電量比較低時,為保證下一個工作循環的能量供應,發動機除了提供正常工作所需動力外還要提供多余的動力驅動電機充電。即,若SOC<SOClow,則:

式中:Tm_gen為電機充電轉矩。
需要說明的是,對于荷電維持型混合動力系統,行車充電模式并不是一個經常的狀態,只在電池電量低于最低限值時才為電池充電,以保護電池和保證電機所需電量。
(4)減速/制動能量回收模式:在停振/停車過程中,液壓系統反向壓力增大,采用電機制動,同時可吸收部分制動能量至電池。電機制動能力不足時,再利用發動機反拖制動進行補充。即:

式中:Tm_gen= min (Tp,Tm_gen_max);Tm_gen_max為電機最大充電轉矩。
此模式下,若SOC>SOChigh,則Tm_gen=0。即為防止對電池過度充電,完全由發動機反拖制動。
(5)怠速停車模式:在停車或發動機怠速時,需根據電池的電量判斷是否需充電,即:

4 混合動力系統仿真分析
根據上述控制策略,在某雙鋼輪振動壓路機原有行走液壓系統的基礎上建立了并聯混合動力系統仿真模型,如圖3所示,包括電機模型、動力電池模型、電機控制單元模型以及轉矩合成裝置模型等。

圖3 行走系統的并聯混合動力系統模型Fig.3 Parallel hybrid system model for driving system
對仿真模型用AMESim和ADAMS聯合仿真方法進行了從高速起步到停車制動的一個載荷循環過程仿真分析,結果見圖4~圖9。

圖4 行走加速度變化規律Fig.4 Curve of driving acceleration

圖5 行走速度變化規律Fig.5 Curve of driving speed
由圖4、圖5可知:起步最大加速度約為1.5 m/s2,加速度峰值不大,降低了液壓系統峰值壓力,改善了液壓系統性能。加速過程持續了約2.8s,略短于原液壓傳動系統,改善了起步過程壓實質量。加速過程結束后行走速度穩定在3.2 m/s附近,波動較小,保證了壓實均勻性。停車制動過程相反,最大加速度約為1.85m/s2,制動過程略短于加速過程。

圖6 轉矩特性Fig.6 Characteristics for torque

圖7 功率特性Fig.7 Characteristics for power
由圖6、圖7可知:起步過程發動機的輸出轉矩被限制在一定范圍,起步初始階段(第1s內)發動機轉矩不斷增加,但未達到限值150N·m,發動機提供全部轉矩,電機轉矩為零。起步中后期轉矩繼續增加,超過限值150N·m時,所需轉矩不足部分由電機提供。穩定行駛過程需求轉矩下降至不足70N·m,發動機提供全部轉矩,此時電機處于空轉狀態,輸出轉矩為零。制動過程,電機作為發電機運行,克服大部分制動力矩。制動力矩超過電機最大發電力矩的部分由發動機反拖提供。發動機的最大輸出功率為35kW,電機的最大輸出功率為42kW,說明對發動機和電機額定功率的選擇是合理的,同時發動機的功率利用率由原來的15%提高到23%。
由圖8可知:與原液壓傳動系統相比,起步過程發動機的掉速由原350r/min降低到150r/min,停車制動過程發動機的反拖升速由原250r/min降低到100r/min,發動機轉速波動范圍減小一半以上,極大地改善了發動機工作狀態,降低了慣性負荷對發動機的損傷。
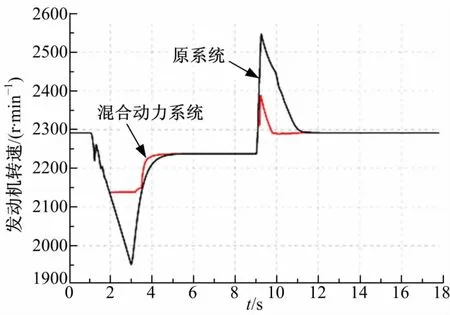
圖8 發動機轉速變化規律Fig.8 Curve of engine speed

圖9 電池SOC變化規律Fig.9 Curve of SOC
仿真結果表明,并聯式混合動力系統可應用在雙鋼輪振動壓路機上,能有效降低裝機功率,提高功率利用率,降低能耗,改善發動機工作條件。若采用電控發動機,制定更加復雜的控制策略,對發動機實行恒速多工作點控制,在保證壓實質量的前提下,以降低油耗和改善排放為控制目標,混合動力系統的優勢將更加明顯。
5 結 論
將并聯式混合動力系統應用在雙鋼輪振動壓器機上,具有以下優點。
(1)雙鋼輪振動壓路機起步和制動過程發動機轉速波動范圍減小一半以上,降低了慣性負荷對發動機的損傷。穩定壓實過程的行走速度較穩定,保證了壓實質量。
(2)雙鋼輪振動壓路機起步過程發動機的輸出轉矩未超過設定的限值,不足轉矩由電機提供;穩定行駛過程發動機提供全部轉矩。
(3)雙鋼輪振動壓路機制動過程實現了能量回收;循環前后<0.005,基本上實現了電池荷電的維持。
[1]沈建軍,劉龍,唐紅彩.基于AMESim與ADAMS的雙鋼輪壓路機振動液壓系統的仿真分析[J].中國工程機械學報,2009,7(1):31-35.Shen Jian-jun,Liu Long,Tang Hong-cai.Simulation and analysis on vibratory hydraulic system on tandem rollers using AMESim and ADAMS[J].Chinese Journal of Construction Machinery,2009,7(1):31-35.
[2]沈建軍.雙鋼輪壓路機動態特性分析及慣性負荷的抑制[D].西安:長安大學工程機械學院,2009.Shen Jian-jun.Analysis of dynamic characteristic and control of inertial loads on tandem vibratory roller[D].Xi'an:School of Construction Machinery,Chang'an University,2009.
[3]沈建軍,馮忠緒,侯勁汝,等.雙鋼輪壓路機行走液壓系統參數的匹配[J].長安大學學報:自然科學版,2009,29(5):122-126.Shen Jian-jun,Feng Zhong-xu,Hou Jin-ru,et al.Parameters matching of hydraulic driving system of tandem vibratory roller[J].Journal of Chang'an University(Natural Science Edition),2009,29(5):122-126.
[4]劉龍,唐紅彩,沈建軍.雙鋼輪壓路機行走液壓系統仿真分析[J].建筑機械,2009,29(7):62-67.Liu Long,Tang Hong-cai,Shen Jian-jun.Simulation analysis of travel hydraulic system on tandem roller[J].Construction Mechinery,2009,29(7):62-67.
[5]馮忠緒,侯勁汝,沈建軍,等.雙鋼輪振動壓路機功率的配置[J].長安大學學報:自然科學版,2009,29(6):107-110.Feng Zhong-xu,Hou Jin-ru,Shen Jian-jun,et al.Power balance of double-drum vibratory roller[J].Journal of Chang'an University(Natural Science Edition),2009,29(6):107-110.
[6]李立民,馮忠緒,張藝莎,等.中國與外國雙鋼輪振動壓路機的主要差距[J].長安大學學報:自然科學版,2011,31(3):102-106.Li Li-min,Feng Zhong-xu,Zhang Yi-sha,et al.Main performance difference of double-drum vibration roller made in China compared with that made in other countries[J].Journal of Chang'an University(Natural Science Edition),2011,31(3):102-106.
[7]G?kdere L U ,Benlyazid K,Dougal R A ,et al.A virtual prototype for a hybrid electric vehicle[J].Mechatronics,2002,12(4):575-593.
[8]Baumann B M,Washington G,Glenn B C,et al.Mechatronic design and control of hybrid electric vehicles[J].IEEE/ASME Transactions on Mechatronics,2000,5(1):58-72.
[9]劉濤,劉清河,姜繼海.并聯式液壓混合動力車輛再生制動的影響因素[J].吉林大學學報:工學版,2010,40(6):1473-1477.Liu Tao,Liu Qing-he,Jiang Ji-hai.Factors influencing regenerative braking of parallel hydraulic hybrid vehicles[J].Journal of Jilin University(Engineering and Technology Edition),2010,40(6):1473-1477.
[10]崔星,項昌樂.多模式機電混合驅動系統特性[J].吉林大學學報:工學版,2011,41(2):303-308.Cui Xing,Xiang Chang-le.Characteristics of multimode electro-mechanical vehicular drivetrain[J].Journal of Jilin University (Engineering and Technology Edition),2011,41(2):303-308.
[11]于安才,姜繼海.液壓混合動力挖掘機回轉裝置控制方式的研究[J].西安交通大學學報,2011,45(7):30-33,49.Yu An-cai,Jiang Ji-hai.Control strategy for hydraulic hybrid excavator slewing[J].Journal of Xi'an Jiaotong University,2011,45(7):30-33,49.
[12]Xiao Qing,Wang Qing-feng,Zhang Yan-ting.Control strategies of power system in hybrid hydraulic excavator[J].Automation in Construction,2008,17(4):361-367.
[13]王慶豐,張彥亭,肖清.混合動力工程機械節能效果評價及液壓系統節能的仿真研究[J].機械工程學報,2005,41(12):135-140.Wang Qing-feng,Zhang Yan-ting,Xiao Qing.Evaluation for energy saving effect and simulation research on energy saving of hydraulic system in hybrid construction machinery[J].Chinese Journal of Mechanical Engineering,2005,41(12):135-140.
[14]Lin Tian-liang,Wang Qing-feng,Hu Bao-zan,et al.Development of hybrid powered hydraulic construction machinery[J].Automation in Construction,2010,19(1):11-19.
[15]劉龍.雙鋼輪壓路機液壓系統分析與仿真[D].西安:長安大學工程機械學院,2010.Liu Long.Simulation and analysis of hydraulic system on tandem roller[D].Xi'an:School of Construction Machinery,Chang'an University,2010.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44