基于滑模控制的三相四線制有源濾波器的研究
2013-08-20 04:57:50吳雷周怡
電子設(shè)計(jì)工程 2013年18期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
吳雷,周怡
(江南大學(xué) 江蘇 無(wú)錫 214122)
隨著科學(xué)技術(shù)的迅猛發(fā)展,電力電子技術(shù)變得更加成熟,各種大功率開(kāi)關(guān)器件得到了廣泛的應(yīng)用。技術(shù)的發(fā)展雖然給電能的變換應(yīng)用帶來(lái)了很大的方便,但是也造成了嚴(yán)重的電力系統(tǒng)諧波污染[1]。有源電力濾波器是一種功能強(qiáng)大的電力電子裝置,它對(duì)諧波能快速跟蹤同時(shí)實(shí)現(xiàn)諧波和無(wú)功功率的補(bǔ)償。
在我國(guó)的電力系統(tǒng)中,工廠和居民用電一般采用三相四線制的形式接入。以往的研究主要集中于三相三線制系統(tǒng),所設(shè)計(jì)的有源電力濾波器并不適用于三相四線制系統(tǒng)。三相四線制系統(tǒng)往往與不平衡負(fù)載相連接,中線電流不為零。系統(tǒng)中不僅有諧波正序分量,還有負(fù)序分量和零序分量。由于以上因素,設(shè)計(jì)三相四線制系統(tǒng)中的有源濾波器的難度較大。有源電力濾波器的主電路為變流器,變流器的控制策略在很大程度上影響了有源電力濾波器的補(bǔ)償性能。常見(jiàn)的有源濾波器控制策略有電流滯環(huán)控制、三角波比較控制、無(wú)差拍控制和電壓空間矢量控制等,在應(yīng)用中都有一定的局限性。分析有源電力濾波器的主電路可知,它工作在不同的開(kāi)關(guān)模態(tài)下,是一個(gè)變結(jié)構(gòu)控制系統(tǒng)。滑模控制具有很強(qiáng)的魯棒性,對(duì)于外界干擾表現(xiàn)自適應(yīng)性,適合作為變結(jié)構(gòu)非線性系統(tǒng)的控制策略[2]。因此,本文將滑模控制理論應(yīng)用于有源電力濾波器的電流跟蹤控制中。
1 三相四線制有源電力濾波器主電路數(shù)學(xué)模型
文中主電路變流器的拓?fù)浣Y(jié)構(gòu)采用三相四橋臂拓?fù)浣Y(jié)構(gòu),如圖1所示。其中,橋臂的輸出電感用L來(lái)表示,開(kāi)關(guān)器件用T1~T8來(lái)表示,直流側(cè)電容用C來(lái)表示,三相輸出電流用ifa、ifb、ifc來(lái)表示,直流側(cè)電流用 idc來(lái)表示,中線電流用 ifn來(lái)表示,電網(wǎng)電壓分別用Usa,Usb,Usc來(lái)表示,各個(gè)橋臂的中點(diǎn)相對(duì)于直流母線負(fù)端 N 點(diǎn)的電位分別由 Ua,Ub,Uc,Un來(lái)表示,直流母線電壓由Udc來(lái)表示。
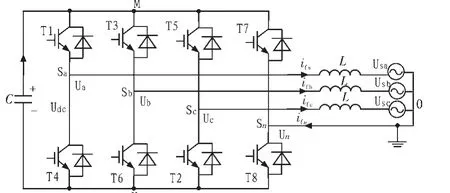
圖1 四橋臂變流器主電路拓?fù)浣Y(jié)構(gòu)Fig.1 Topology structure of main circuit with four bridge inverter
開(kāi)關(guān)函數(shù)Si定義為如下:

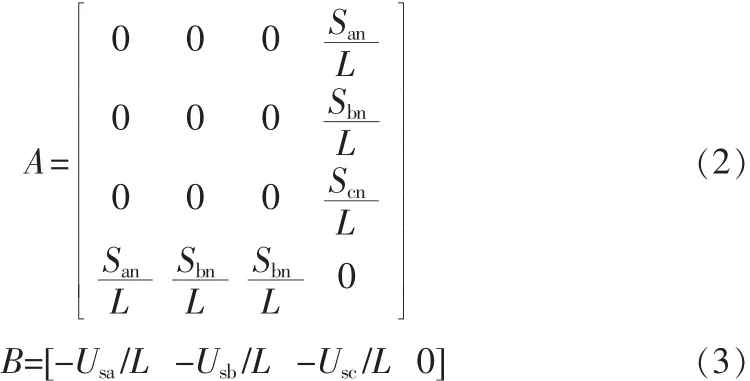
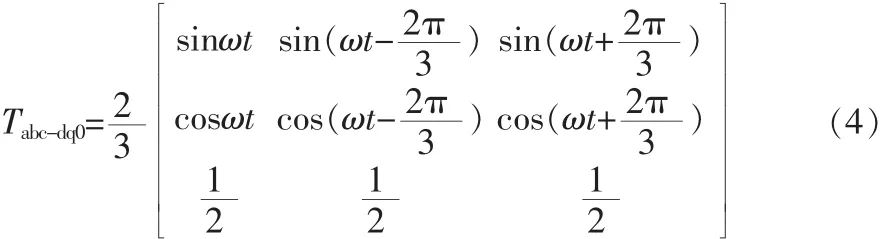
其中,Ua_ref=Ua-Un,Ub_ref=Ub-Un,Uc_ref=Uc-Un。 另外,令 San=Sa-Sn,Sbn=Sb-Sn,Scn=Sc-Sn,同時(shí)引入狀態(tài)變量 X,X=[ifaifbifcifn]T將abc坐標(biāo)系轉(zhuǎn)換到dq0同步坐標(biāo)系,以方便設(shè)計(jì)控制器。考慮到坐標(biāo)變換在實(shí)際系統(tǒng)中關(guān)聯(lián)到鎖相,本文鎖相信號(hào)由正弦A相相電壓來(lái)表示,同時(shí)根據(jù)正弦制作坐標(biāo)變換的表,變換矩陣和Park變換的變換矩陣稍有差別,如式(4)所示:
得出d-q-0坐標(biāo)下的數(shù)學(xué)模型:
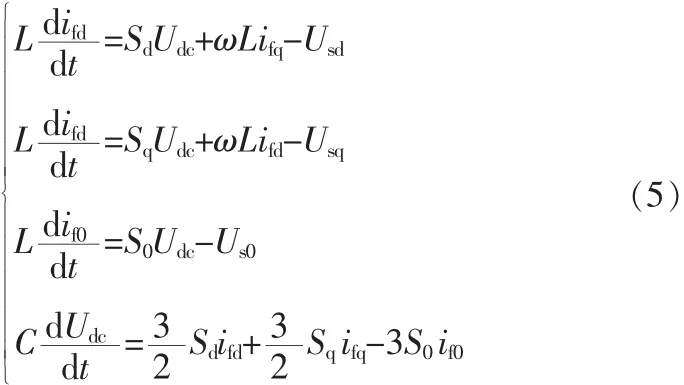
由式(5)可知,同步旋轉(zhuǎn)坐標(biāo)變換的時(shí)候引入d、q軸之間的耦合項(xiàng)。當(dāng)電流控制器采取閉環(huán)調(diào)節(jié)的時(shí)候,d軸或者q軸的輸出電流通常會(huì)受到彼此控制量的影響,這將會(huì)對(duì)控制系統(tǒng)產(chǎn)生嚴(yán)重的影響,在設(shè)計(jì)控制器時(shí)需要先進(jìn)行解耦的處理。
2 逆系統(tǒng)解耦線性化
逆系統(tǒng)方法的基本原理[3]可概括為:原系統(tǒng)和原系統(tǒng)的α階可逆系統(tǒng)之間帶有一個(gè)狀態(tài)反饋,這個(gè)狀態(tài)反饋是根據(jù)原系統(tǒng)的初始值和α階可逆系統(tǒng)的初始值之間的關(guān)系設(shè)定的α。階可逆系統(tǒng)逆系統(tǒng)和原系統(tǒng)串聯(lián)起來(lái)之后得到偽線性系統(tǒng)。得到偽線性系統(tǒng)后,一般將該系統(tǒng)分成幾個(gè)獨(dú)立的子線性系統(tǒng),再分別設(shè)計(jì)控制器。可見(jiàn),通過(guò)逆系統(tǒng)將原本的非線性系統(tǒng)轉(zhuǎn)化為了偽線性系統(tǒng),使問(wèn)題得以簡(jiǎn)化,降低了控制器設(shè)計(jì)的難度。
在上文中已經(jīng)推導(dǎo)出了三相四橋臂有源電力濾波器在d-q-0 坐標(biāo)下的變量表示。 在式(5)中,令[x1,x2,x3,x4]=[ifd,ifq,if0,Udc],[u1,u2,u3]=[Sd,Sq,S0],[y1,y2,y3]=[x1,x2,x3],將原系統(tǒng)的狀態(tài)方程寫(xiě)作:
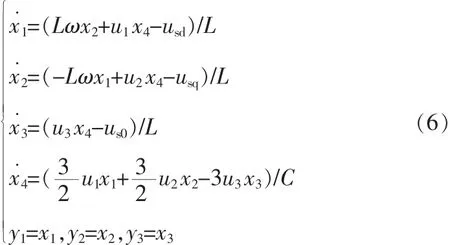
由式(6)可知,三相四橋臂有源電力濾波器系統(tǒng)具有3個(gè)輸入[x1,x2,x3]和 3 個(gè)輸出[y1,y2,y3],具有非線性特征,且變量之間存在耦合的關(guān)系。將被控對(duì)象進(jìn)行逆系統(tǒng)構(gòu)造,得到一個(gè)線性解耦的系統(tǒng),利于控制器的設(shè)計(jì)[4]。
對(duì) APF 的系統(tǒng)輸出[y1,y2,y3]分別求導(dǎo)可得:
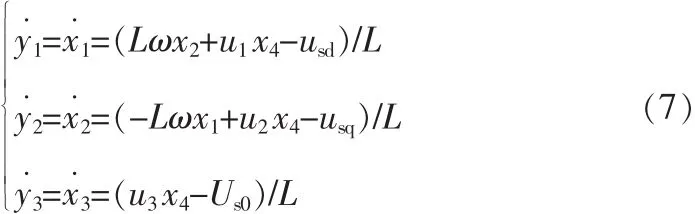
式中可明顯看出含有[u1,u2,u3],由式(7)可求得有源電力濾波器的逆系統(tǒng)如下:
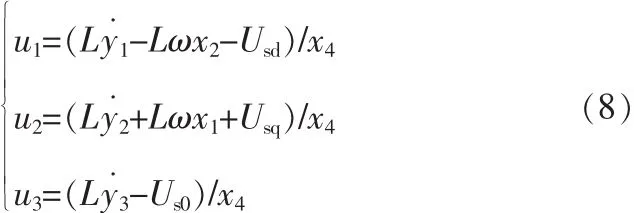
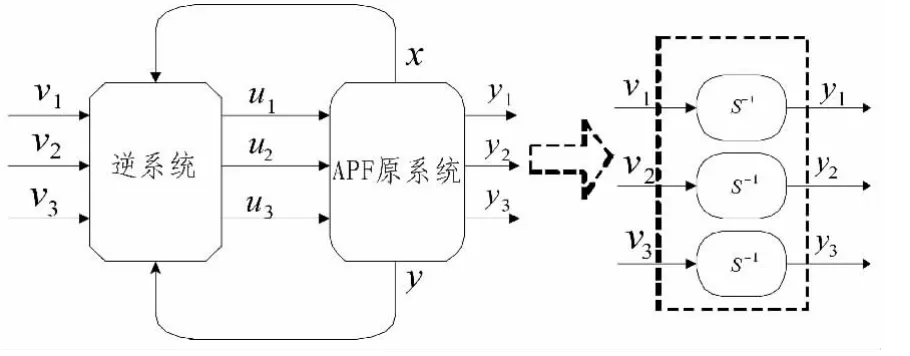
圖2 線性化解耦后的有源電力濾波器系統(tǒng)Fig.2 Active power filter system after linearization and decoupling
圖2中的偽線性具有三輸入和三輸出,狀態(tài)變量之間彼此不存在耦合,可以看成3個(gè)獨(dú)立的子線性系統(tǒng):

3 滑模控制器的設(shè)計(jì)
本文設(shè)計(jì)的滑模控制器必須保證能實(shí)現(xiàn)對(duì)指令電流的快速、精確跟蹤。此外,由于電網(wǎng)的不穩(wěn)定和負(fù)載的突變,補(bǔ)償電流也是不斷變化的,這就要求系統(tǒng)具有良好的魯棒性。眾所周知,滑模控制的魯棒性非常優(yōu)良,所以控制器的設(shè)計(jì)重點(diǎn)應(yīng)該解決合適的切換面和性能優(yōu)良的控制律。
1)切換面的選擇
2)滑模控制律的設(shè)計(jì)
該部分即確定系統(tǒng)在趨近運(yùn)動(dòng)段的運(yùn)動(dòng)狀態(tài),選取指數(shù)趨近規(guī)律進(jìn)行設(shè)計(jì),如式(12)所示:

指數(shù)趨近律中的-ks部分稱作指數(shù)趨近項(xiàng),-εsgn(s)部分稱作等速趨近項(xiàng)[5]。考慮將等速趨近變?yōu)樽兯仝吔兯仝吔?xiàng)為-εs2sgn(s),變速趨近的速度與s2成正比。當(dāng)運(yùn)動(dòng)點(diǎn)遠(yuǎn)離滑模面時(shí)趨近速度很大,運(yùn)動(dòng)到滑模面附近時(shí),速度較小,改進(jìn)后的指數(shù)趨近律如式(13)所示:

下面檢驗(yàn)改進(jìn)后的指數(shù)趨近律是否滿足滑動(dòng)模態(tài)存在和可達(dá)條件:

以上分析可知,改進(jìn)后的指數(shù)趨近律可以滿足條件。
為了更近一步減小抖振,考慮用飽和函數(shù)代替式(13)中的符號(hào)函數(shù)。飽和函數(shù)圖像如圖3所示。
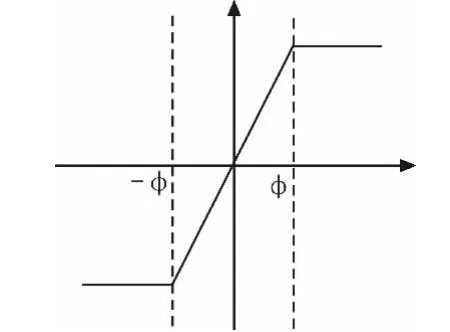
圖3 飽和函數(shù)圖像Fig.3 Image of saturated function
飽和函數(shù)的公式表達(dá)如式(16)所示:
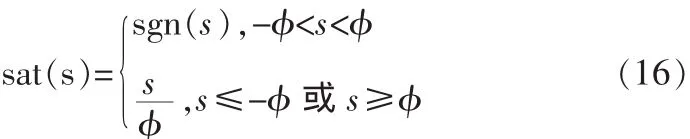
符號(hào)函數(shù)具有繼電器特性,開(kāi)關(guān)切換會(huì)造成系統(tǒng)控制的不連續(xù)性。用飽和函數(shù)代替符號(hào)函數(shù),在[-φ,φ]的區(qū)間內(nèi)采用線性控制而不是變結(jié)構(gòu)控制。飽和函數(shù)的邊界層附近增益高,并有一定量的時(shí)間滯后,可以緩和開(kāi)關(guān)切換的不連續(xù)性[6]。本文采用指數(shù)趨近律與飽和函數(shù)切換相結(jié)合的方法設(shè)計(jì)滑模趨近律,大大減弱了抖振,同時(shí)也能保證快速趨近,使控制器具有更好的動(dòng)態(tài)性能。
式(9)所示子系統(tǒng)經(jīng)過(guò)改進(jìn)滑模控制律分別為:

按照同樣的方法設(shè)計(jì)式(10)和式(11)所示的子系統(tǒng)的控制律:

取趨近律函數(shù)的參數(shù) k1=k2=k3=105,ε1=ε2=ε3=1。
4 仿真分析
搭建好系統(tǒng)仿真模塊之后,進(jìn)行仿真來(lái)驗(yàn)證本文理論的正確性。仿真時(shí)間為0.2 s,在0.04 s向系統(tǒng)中投入有源濾波器,負(fù)載為三相整流橋。
當(dāng)三相整流橋諧波源負(fù)載工作時(shí),向電網(wǎng)注入大量5次和7次諧波,負(fù)載側(cè)電流發(fā)生畸變,成為鞍形波,此時(shí),電源側(cè)電流也是鞍形波。經(jīng)0.04 s時(shí),有源濾波器投入,電網(wǎng)側(cè)畸變?yōu)榘靶尾ǖ碾娏骰謴?fù)為正弦波,諧波被濾除,如圖4所示。
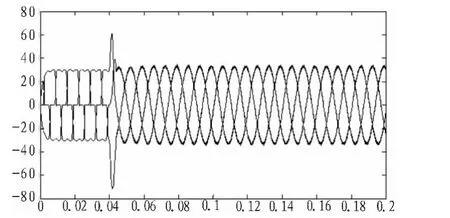
圖4 電網(wǎng)側(cè)電流Fig.4 Grid-side current
在沒(méi)有投切有源濾波器的時(shí)候,對(duì)電網(wǎng)諧波電流進(jìn)行FFT分析。補(bǔ)償前的諧波畸變率THD=24.66%,電網(wǎng)被嚴(yán)重污染,如圖5所示。
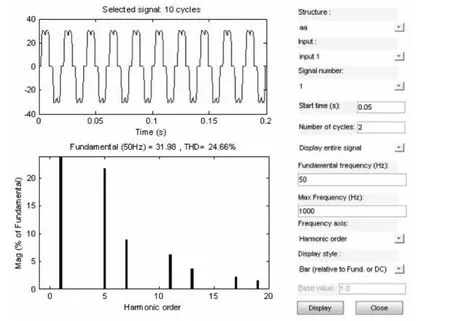
圖5 補(bǔ)償前電網(wǎng)側(cè)電流的FFT分析Fig.5 FFT analysis of grid-side current before the compensation
采用滑模控制,補(bǔ)償后的諧波畸變率THD=0.60%。由此可見(jiàn),采用滑模控制能讓有源濾波器具有良好的補(bǔ)償效果,如圖6所示。
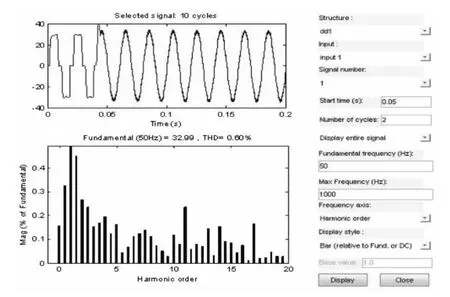
圖6 補(bǔ)償后電網(wǎng)側(cè)電流的FFT分析Fig.6 FFT analysis of grid-side current after the compensation
5 結(jié) 論
基于三相四線制有源濾波器的主電路的數(shù)學(xué)模型,用逆系統(tǒng)方法實(shí)現(xiàn)解耦和線性化,對(duì)三個(gè)獨(dú)立的子系統(tǒng)分別設(shè)計(jì)滑模控制器。針對(duì)滑模控制的抖振問(wèn)題,提出一種指數(shù)趨近律結(jié)合飽和函數(shù)的設(shè)計(jì)方法,緩解結(jié)構(gòu)切換的不連續(xù)性,有效削弱抖振。仿真結(jié)果證明,本方法適于有源濾波器的工作特點(diǎn),能提高有源電力濾波器的指令電流跟蹤能力,同時(shí)系統(tǒng)具有強(qiáng)魯棒性。本方法具有較好的理論和實(shí)用價(jià)值,為工程實(shí)踐提供了新的思路。
[1]Ying Jie-he,Yunping Zou,F(xiàn)ei Liuet al.Research on parallel operation of active power filters[C]//IEEE Power Electronics Specialists Conference,2006.18-22.
[2]馬皓,張濤,韓思亮.新型逆變器滑模控制方案研究[J].電工技術(shù)學(xué)報(bào),2005,20(7):50-56.
MA Hao,ZHANG Tao,HAN Si-liang.Analysis and design of sliding mode control for novel buck inverter[J].Transactions of China Electrotechnical Society,2005,20(7):50-56.
[3]李泰,王奔.基于逆系統(tǒng)方法的三相PWM整流器直接功率控制[J].電氣傳動(dòng),2008,38(10):33-38.
LI Tai,WANG Ben.Direct power control of three phase PWM rectifier based on the inverse system theory[J].Electric Drive,2008,38(10):33-38.
[4]魏文輝,劉文華,宋強(qiáng),等.基于逆系統(tǒng)方法有功無(wú)功解耦PWM控制的鏈?zhǔn)絊TATCOM動(dòng)態(tài)控制策略研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2005,25(3):23-28.
WEI Wen-hui,LIU Wen-hua,SONG Qiang,et al.Research on fast dynamic control of static synchronous compensator using cascade multilevel inverters[J].Proceedings of the CSEE,2005,25(3):23-28.
[5]Cortes D,Alvarez J,Vazquez N.Output Feedback Sliding-Mode Control for the Boost Inverter[C]//Proceedings.of IEEE IECON’06.Paris:2006:1890-1895.
[6]金鴻章,羅延明,肖真,等.抑制滑模抖振的新型飽和函數(shù)法研究[J].哈爾濱工程大學(xué)學(xué)報(bào),2007,28(3):288-291.
JIN Hong-zhang,LUO Yan-ming,XIAO Zhen,et al.Investigation of a novel method of saturation function for chattering reduction of sliding mode control[J].Journal of Harbin Engineering University,2007,28(3):288-291.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17