基于計算機圖像定位的伺服平臺研究
2013-08-20 04:58:18聶華
電子設計工程 2013年18期
關鍵詞:計算機
聶華
(陜西職業技術學院 陜西 西安 710100)
計算機視覺是指用計算機實現人視覺的某些功能,其最終目標是對三維客觀世界的理解[1]。計算機視覺作為當今最為活躍和富有挑戰意義的研究領域,其研究內容和應用領域是相當廣泛的。
它是工業自動化、機器人智能化、自主導航、目標跟蹤、工業檢測及軍事武器應用的核心技術之一。計算機視覺的開創性工作從20世紀60年代中期開始。以美國MIT的Robert把二維圖像分析推廣至三維實體景物分析,標志著計算機立體視覺技術的誕生,并在隨后的20年內發展成為一門新的學科。特別是20世紀70年代末,Marr等創立的計算機視覺理論框架對計算機視覺發展產生了巨大影響,已經形成了從圖像獲取到景物表面重建的完整體系[2]。而高精度的實時跟隨伺服性能就需要有靈敏性高的傳感器和可靠性高的跟隨性穩定伺服電路作為支撐。經實驗可驗證將高精度三軸陀螺儀引入到伺服平臺,可以達到伺服平臺對特定目標圖像的精確跟隨。
1 計算機圖像定位原理
要確定空間某目標的位置,需要參考坐標系,那么可以通過計算機對攝像機獲得的該目標圖像進行處理,得到該目標的位置和距離,如圖1所示。
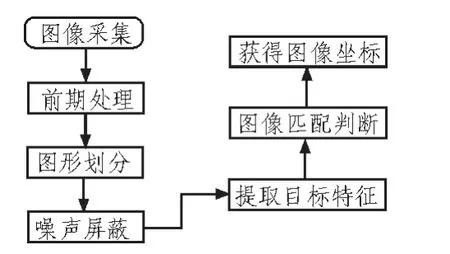
圖1 圖像處理工作流程Fig.1 Workflow of Image processing
攝像機成像的圖像是由M×N個點組成,圖像中的每個元素稱為像素,每個像素點的大小就形成了灰度或亮度。攝像機的成像是由針孔模型為基礎,通過透視投影將三維空間的景物映射到二維像素矩陣中的灰度值來形成。成像過程的坐標變換可以通過4個坐標系的3次轉換來表征,這4個坐標系分別為:
1)環境坐標系(X,Y,Z):根據具體環境的特點選定,用于表達目標的絕對圖像坐標。
2)攝影坐標系(Xs,Ys,Zs):以攝像機 O 點位坐標原點,X,Y軸分別和感光元件平面的兩條垂直邊平行,Z軸和攝像機光軸重合。
3)圖像坐標系(X,Y):表示目標在圖像平面上的投影,坐標系原點在感光元件圖像平面中心,X,Y軸分別平行于平面的兩條垂直邊。
4)像素坐標系(u,v):表示圖像陣列中圖像像素的位置,坐標原點O在感光元件的圖像平面的左上角,U、V軸分別平行于圖像平面的X、Y軸,坐標值為離散型的整數值。
攝像機標定中最簡單的線性模型稱為針孔模型,空間任意一點P在圖像上投影點p,攝像機坐標系和世界坐標系之間的關系如圖2。
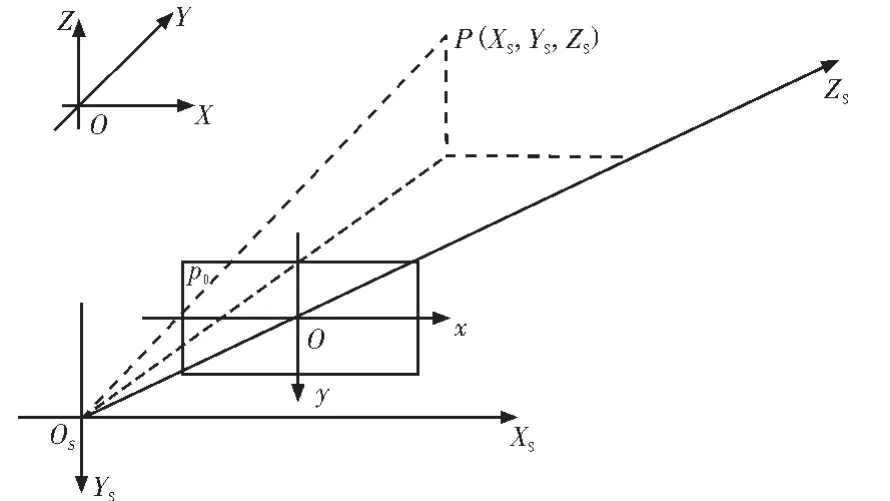
圖2 攝像機坐標系和世界坐標系的關系Fig.2 The camera coordinate system and world coordinate system
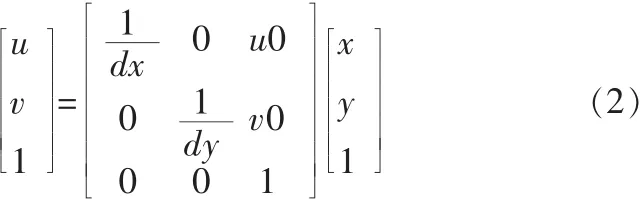
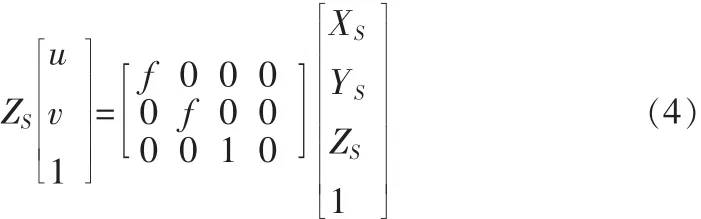
(u,v)表示以像素為單位的像素坐標系的坐標,(x,y)表示以毫米為單位的圖像坐標系的坐標,原點O1定義在攝像機光軸與圖像平面的交點,該店一般位于圖像的中心,如圖3,但實際情況總是會偏離中心。若O1在u、v坐標系下的坐標為(u0,v0),每個像素x軸和y軸方向上的物理尺寸為dx、d,則在圖像中任意一個像素在兩個坐標系下的坐標有如下關系:

圖3 圖像坐標系與像素坐標系關系Fig.3 Image coordinate and pixel coordinate system

用齊次坐標系和矩陣形式表示上式:
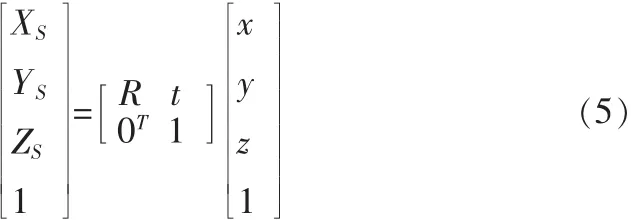
由圖2的比例關系可以得到攝像機坐標系和圖像坐標系之間的變換如下:

用齊次矩陣表示:
由式(3)進一步變換:
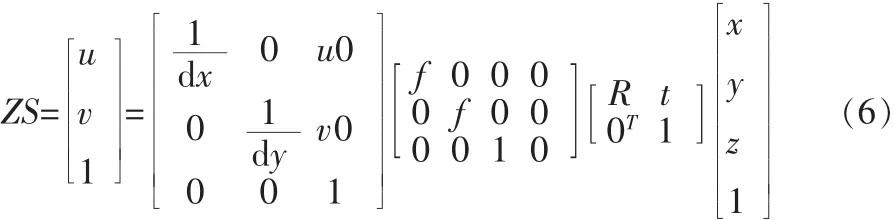
對以上公式進行綜合變換計算,得到了以世界坐標系來表示P點坐標與其投影點P的圖像坐標系(u,v)的變換關系:
2 伺服平臺工作原理
2.1 伺服平臺系統組成
圖像定位伺服平臺由伺服試驗平臺、旋轉伺服電機及減速機構、俯仰伺服電機及減速機構、陀螺儀和硬件電路組成。如圖4所示。
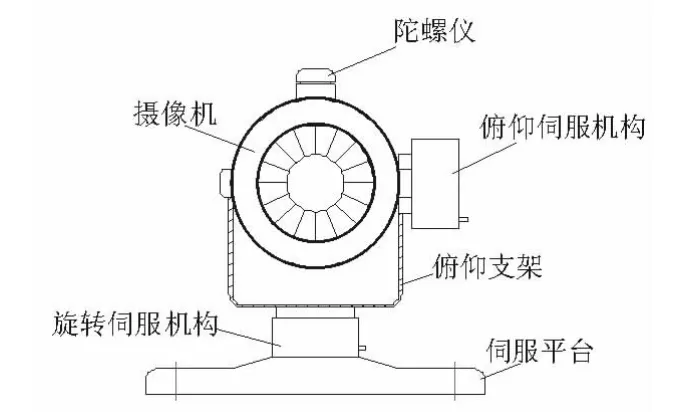
圖4 圖像定位伺服平臺系統組成Fig.4 Servo platform of image positioning system
伺服平臺安置有三軸陀螺儀傳感器,傳感器作為系統的主要部件用來收集伺服平臺及其所搭載的實驗儀器或設備在空間上的瞬間姿態數據信息并及時反饋給硬件電路。兩套伺服機構以90°交叉在伺服平臺和俯仰支架上安裝,硬件電路為了不妨礙伺服實驗平臺的運動均放置在平臺之外。
2.2 伺服平臺的的工作原理
伺服平臺是一種全向平臺,可以在空間2自由度范圍內進行旋轉如圖5,伺服平臺的空間定位數據,主要靠陀螺儀進行獲取[3]。當攝像機和伺服系統啟動工作,陀螺儀的初始化空間坐標數據會通過計算機傳至伺服平臺的俯仰伺服電機和旋轉伺服電機,然后運行至指定坐標數據處。當上位機通過算法計算出目標坐標數據,將會立即再次與陀螺儀進行數據通訊,陀螺儀獲取數據后,會自動傳輸運動信號至俯仰、旋轉伺服電機,使伺服平臺到達指定空間坐標處。當到達位置后,陀螺儀將繼續檢測位置信號并與上位機信號進行比對檢測,并且進入等待模式做好接收下一組數據序列的準備。
3 基于DSP的控制系統
3.1 控制系統的硬件組成
伺服平臺的位置感應系統選用意法半導體公司(ST)的LIS3LV02DQ三軸陀螺儀作為主要傳感器[4]。芯片具有空間X、Y、Z軸數字信號輸出加速度模塊,集成電路快速接口和可以方便采集位置數據的敏感部件,并提供和外部芯片進行快速通訊的串行/SPI接口。芯片的制造再用精度較高的工藝而非不是通用地CMOS工藝,芯片加速度數據模塊有非常全面地可選精度范圍——±2 g~±6 g,加速度采樣帶寬640 Hz[5]。
硬件控制系統和數據計算傳輸選用TI公司的TMS320C2000系列數字信號處理芯片[6]。由于LIS3LV02DQ是數字信號輸出芯片,三軸傳感器與芯片之間采用串行SPI接口進行數據傳輸,因而減少了信號輸入和返回的時間,加快了硬件信號處理系統的反應速度。硬件系統獲取了加速度數據后立即處理,將算法得出的控制信號傳至驅動電路,帶動伺服機構工作。如圖4所示。
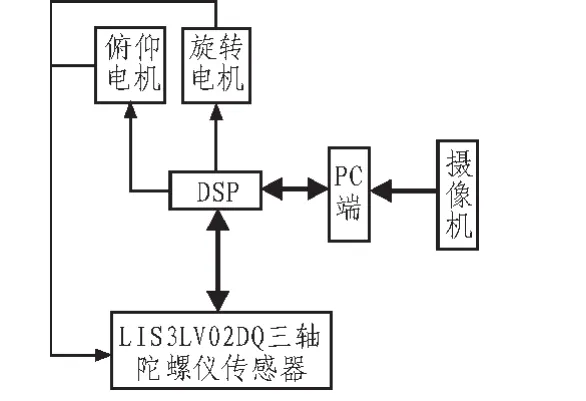
圖5 伺服平臺硬件控制系統Fig.5 Control system of servo platform hardware
3.2 控制系統程序設計
在圖4硬件電路系統框圖中可以看到,DSP作為中央處理器,在控制系統中接受PC端和傳感器[7-8]端口的數據,并對數據進行處理,最后將控制數據傳送至俯仰、旋轉電機。TMS320C2000系列芯片具有獨立地引導Boot程序代碼區,可以通過Boot片上引導程序方便地實現任務所在系統內的編程。而且芯片內具有大容量可編程flash快速擦寫區,有足夠的空間存放系統任務程序代碼。芯片的特殊之處是具有事件管理器(EVA,EVB)功能和相應端口,有多個精度16位可以產生編程模式脈寬調制信號的管腳,為伺服平臺使用脈寬信號調節機構的角度、速度提供了更為便利地輸出端口。
硬件程序流程如圖6所示。
4 結束語
設計的伺服平臺結構合理,在前期聯合實驗測試運行過程中整體顯示平穩,在PC端上位機的控制和監測下伺服平臺運行可靠,但攝像機定位坐標數據的精度準確性和伺服平臺的融合性能還有待進一步的提高。三軸陀螺儀傳感器模塊的數據傳送迅速準確,經過程序優化后的各個伺服機構降低了行走震顫,運行更加平穩流暢。
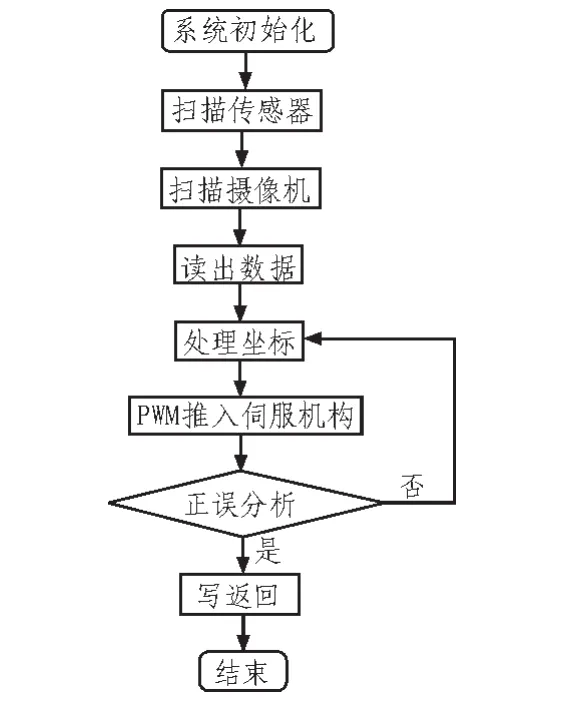
圖6 硬件程序流程圖Fig.6 Program chart of hardware system
[1]劉傳才.圖像理解與計算機視覺[M].廈門大學出版社,2002.
[2]馬頌德.計算機視覺計算理論與算法基礎[M].科學出版社,1998.
[3]楊逢瑜,聶朝瑞.基于三軸陀螺儀的微型液壓伺服平臺[J].液壓與氣動,2012:78-81.
YANG Feng-yu,NIE Chao-rui.Miniature hydraulic servo platform based on three axis gyroscope[J].Hydraulic and Pneumatic,2012:78-81.
[4]Voiskovskii M I,Gorshkov A N,Evlanov E N,et al.Threeaxial fiber optic gyroscope[J].Cosmic Research,2009,47(1):68-74.
[5]Juntao Fei,Hongfei Ding.System Dynamics and Adaptive Control for MEMS Gyroscope Sensor[J].International Journal of Advanced Robotic Systems,2010,7(4):23-28.
[6]Strauss,Will.DSP chip options contract and expand[J].IEEE Signal Processing Magazine, United States May,2005:56-59.
[7]王永強,謝迎天,王慧君.基于同軸電容的過電壓傳感器研究[J].陜西電力,2013(4):61-65.
WANG Yong-qiang,XIE Ying-tian,WANG Hui-jun.Research on overvoltage sensor based on coaxial capacitor[J].Shaanxi Electric Power,2013(4):61-65.
[8]黃華東,郭張軍,彭鵬.基于分布式多傳感器融合技術的壩基地下水宏觀動態監測數據分析[J].陜西電力,2011(3):13-16.
HUANG Hua-dong,GUO Zhang-jun,PENG Peng.Study on macroscopic regime of groundwater under dam section based on distributed multi-sensor data fusion theory[J].Shaanxi Electric Power,2011(3):13-16.
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
趣味(數學)(2020年9期)2020-06-09 05:35:08
鐵道通信信號(2020年12期)2020-03-29 06:21:58
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
消費導刊(2017年20期)2018-01-03 06:26:40
電子制作(2017年14期)2017-12-18 07:08:10
辦公自動化(2016年18期)2016-08-20 12:50:22
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鐵道通信信號(2016年3期)2016-06-01 12:10:18