基于磁控形狀記憶合金驅(qū)動(dòng)器伺服閥的建模與仿真
2013-08-22 11:23:54涂福泉趙振飛
機(jī)床與液壓 2013年24期
關(guān)鍵詞:記憶合金實(shí)驗(yàn)室
涂福泉,毛 陽,趙振飛,李 賀
武漢科技大學(xué)冶金裝備與控制教育部重點(diǎn)實(shí)驗(yàn)室,武漢 430081
1.Introduction
In recent years,the researches on high frequency electro-hydraulic servo valve,which is driven by functional materials actuator,have received increasing attention[1].MSMA is the process by which a ferromagnetic material transforms from one shape to another in the presence of a magnetic field.The MSMA shape change can be axial strain,bending,shear or the combination of them.Since the MSMA forces are molecular in origin,its mechanical response is very fast in a matter of microseconds[2].As a new type functional material,MSMA shows remarkable potentials in overcoming the limitation of the predecessors such as their comparatively large strain and many advantages in generating motion and force[3].Some important studies about the working principles of such materials can be found[4-5].The paper designed a new servo valve model based on MSMA actuator using AMEsim software and PID controller.AMEsim software sets up many modeling contributing to the reasonable design of the whole system.
The models created by AMEsim software can be modified directly in the later works,which effectively improves work efficiency.AMEsim and Simulink software embed many algorithms to ensure the system’s speed and accuracy,as well as offer a variety of interface simulation tools.
2.Structure of servo valve actuator based on MSMA
In the magnetic field of actuator,the number of the coils N is used to generate the current intensity I.Following relationships exist between the magnetic field strength H,the size of the gap g and the magnetic induction B.

The relationships between the strainε,the magnetic field AMEsim B,the external stress H,the piezomagnetic coefficient q and the elastic modulus of MSMA in the magnetic field are:

Simultaneous,following equation can be given according to the material length and strainεrelationship:ε =x/l,electromagnetic law:Φ =BA,and the magnetic circuit’s law NI= ΦR:

Where x is the incremental displacement,A is the transverse cross-section area of MSMA,and R is the total reluctance.Output force of actuator can be expressed as:

According to the relationship between drive current,displacement and output force,the MSMA actuator model can be shown in Fig.1(a),and its equivalent AMEsim simulation model is shown in Fig.1(b).The model consists of force output module and the spring modules together.
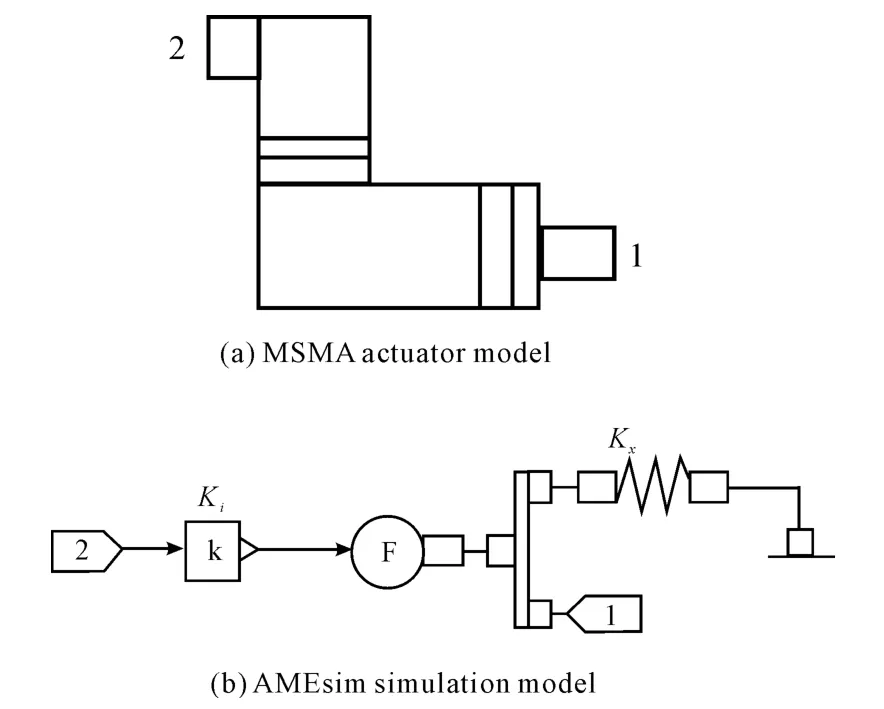
Fig.1 MSMA actuator
3.Controller design of the pilot servo valve based on MSMA
3.1.Modeling of the pilot valve
In order to effectively increase the movement accuracy of the valve and improve the valve hysteresis phenomenon,the paper adds auxiliary feedback loop to reduce or even eliminate the oscillation problem[6-7].In this system,the oscillation is mainly caused by small damping,and the design increases the system’s damping to make it more stable.And differential links are added as acceleration feedback link.As shown in Fig.2,K5 stands for the main valve displacement amplification coefficient,and K6 stands for the servo amplifier.
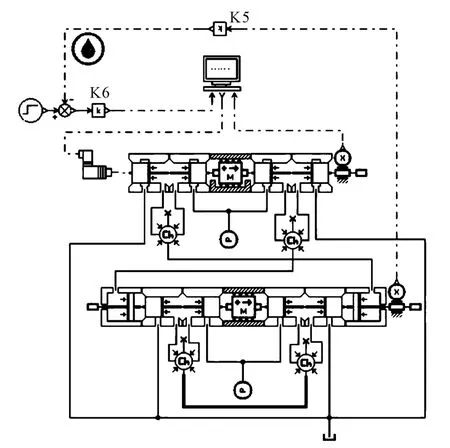
Fig.2 Pilot servo valve model
3.2.PID control algorithm
The paper improves the system performance by adding PID control algorithm.The PID control algorithm is to use proportional,integral and differential algorithm to optimize the system.Proportion control algorithm can adjust the system deviation and reflect this way more quickly;integral algorithm can effectively reduce the static error and improve the static performance of system;differential algorithm can reduce the system’s overshoot.Different algorithms are used under the reasonable condition,which can make the system more rapid,stable and accurate.The PID controller of the servo valve is shown in Fig.3.

Fig.3 Pilot servo valve model with PID control
The main valve response curve under step signal is shown in Fig.4.Curve 1 is the old control sys-tem,and curve 2 is the response curve with PID control.From the chart it is clear to see that the overshoot of the pilot valve obviously decreases with PID control,the response speed of the system accelerates and the system adjustment time significantly reduces.Adding PID control can effectively improve the performance of the whole system.

Fig.4 Curves of the main valve under different control schemes
3.3.Expert PID control and AMEsim/Simulink joined simulation
The joint simulation model is shown in Fig.5 and the simulink structure of the model is shown in Fig.6,the structure gets expert PID controller through write M-file into S-function,the S-function and AMEsim module have data communication.

Fig.5 Joint simulation model
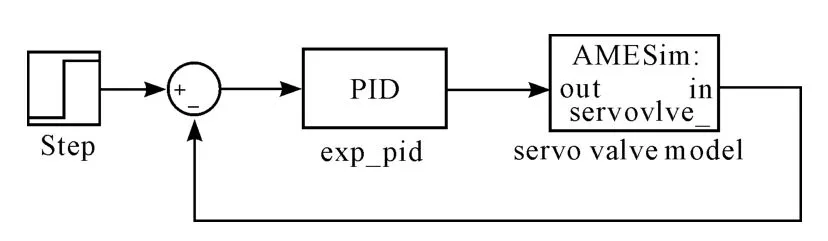
Fig.6 Expert PID control simulation module
The simulation result is shown in Fig.7.Curve 1 is the step signal response curve with expert PID control of main valve core,curve 2 is the conventional PID control.It is obvious to see in the chart that curve 1 had small overshoot and the rise time is faster than that of curve 2.In conclusion,the expert PID control algorithm of curve 1 is greatly improved the servo valve performance.

Fig.7 Simulation result
4.Conclusions
Frequency of the servo valve based on magnetic shape memory alloys can be up to 125 Hz in this paper through simulation,which shows remarkable potentials in overcoming the limitation of the traditional pilot type actuator servo valve.Aimed at the large amount of overshoot,the paper introduces the PID control to adjust the overshoot amount to a reasonable range.According to the characteristics of the pilot valve control model,the design of the pilot valve damping is too small.In view of this situation,the paper adds acceleration feedback to make the system more stable.In order to further improve the characteristics of servo valve,the system introduces expert PID and AMEsim/Simulink simulation technology and finally realizes the ideal results.
[1] Riccardi L,Naso D,Janocha H.A precise positioning actuator based on feedback-controlled magnetic shape memory alloys[J].Mechatronics,2011.12.004.
[2] Tellinen J,Suorsa I,J??skel?inen A,et al.Basic Properties of Magnetic Shape Memory Actuators[M].Actuator 2002,Bremen Germany,June 2002.
[3] Murray S,Marioni M,Allen S.6%Magnetic-field-induced strain by twin-boundary motion in ferromagnetic Ni-Mn-Ga[J].Appl Phy Lett,2000,77:886.
[4] Couch R N,Sirohi J,Chopra I.Development of a quasi-static model of NiMnGa magnetic shape memory alloy[J].Int.Mater.Syst Struct 2007,18:611.
[5] Gauthier J,Lexcellent C,Hubert A,Abadie J.Modeling rearrangement process of marten site platelets in a magnetic shape memory alloy Ni2MnGa single crystal under magnetic field and(or)stress action.[J].Int.Mater.SystStruct,2007,18:289-99.
[6] Yoshida H,Nagai M.Skyhook model following control of vehicle suspension using an ER damper[J].J of JSME,1998,64(625):172-178.
[7] CHoi S B,Song H J,Vibration control of a passenger vehicle utilizing a semi-active ER engine mount[J].Vehicle System Dynamics,2002,37(3):193-216.
猜你喜歡
化學(xué)教與學(xué)(2023年5期)2023-04-03 06:12:14
廣東建材(2021年6期)2021-07-01 02:24:02
電子競技(2020年4期)2020-07-13 09:18:06
電子競技(2020年2期)2020-04-14 04:40:38
科學(xué)技術(shù)創(chuàng)新(2020年21期)2020-01-06 20:58:51
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年12期)2019-05-21 07:26:42
電子競技(2019年22期)2019-03-07 05:17:26
電子競技(2019年21期)2019-02-24 06:55:52
電子競技(2019年20期)2019-02-24 06:55:35
電子競技(2019年19期)2019-01-16 05:36:09
