基于殘差型G-LSSVM的巖石冒落高度及碴石厚度預測
2013-08-25 08:28:00陳尚波張耀平夏弋江田留峰
金屬礦山 2013年8期
關鍵詞:模型
陳尚波 張耀平 夏弋江 田留峰
(1.江西理工大學資源與環境工程學院;2.江西理工大學應用科學學院)
由于礦山地下開采形成的空區受巖體結構、地質構造、地下水等自然因素及采礦工藝、爆破震動等人為因素的影響,空區冒落預測結果往往與實際監測結果相差甚大[1-2]。傳統用于覆蓋層冒落高度及碴石厚度監測的方法有地質雷達法、高密度電法、超聲波探測儀、鉆孔攝影等,而對于冒落高度及碴石厚度的人工智能方法預測尚處于起步階段。本研究結合灰色模型 GM(1,1)[3-4]、最小二乘支持向量機(LSSVM)[5]等人工智能方法的優勢,將殘差型灰色最小二乘支持向量機預測模型(G-LSSVM)應用于某鐵礦的覆蓋層冒落高度及碴石厚度預測中[6],其結果與實際鉆孔攝影監測對比分析,結果表明,殘差灰色最小二乘支持向量機(GLSSVM)預測模型對于實際冒落情況的預測是有效可行的。
1 基本原理
1.1 灰色最小二乘支持向量機模型[7-8]

首先對監測的原始數據按照運用鉆孔攝像監測得到原始數據

進行初步疊加生成富有規律的新序列

然后根據新序列,利用結構簡單、算法簡練的LSSVM列建立預測模型。預測的目標在于要尋找i+p時刻的序列值與前p個時刻的序列值,…,的邏輯關系,即確定映射關系


X1i為p+i時刻的序列行向量,

K()為核函數;系數ai(i=1,2,…,n - p),b是通過求解式(4)得到。

1.2 殘差灰色最小二乘支持向量機
頂板冒落序列可包括具有確定性的趨勢項和未確知性的隨機項2種成分,其響應成分模型可表示為

式中,Ut為冒落高度及碴石厚度的具有確定性的趨勢項;Vt為未確知的隨機項,由于其受到人類地下工程活動以及地震等突發事件的影響,故將其認作為趨勢項的隨機項。
建模結構如圖1,首先用GM(1,1)模型對數據{x(0)(i)},i=1,2,…,n,進行預測,得到一組殘差序列

然后用LSSVM模型對殘差e(0)(i)進行預測,得預測值^e(0)(i),因此模型最終預測值


圖1 殘差型灰色最小二乘支持向量機
2 工程實例
安徽省廬江某鐵礦為一隱伏的大型磁鐵礦床。礦床位于低山丘陵區,地表標高一般在40~200 m,礦體賦存在-268.07~-507.41 m標高內。因該鐵礦經濟價值高,加之礦區地表允許崩落,礦床的開采方式適用于地下開采方法中的無底柱分段崩落采礦方法,該工藝簡單可靠、機械化程度高、生產成本低、作業安全。采用無底柱分段崩落法,對于加強對頂板冒落情況的監測,利用人工智能方法對空區巖石冒落厚度及碴石厚度的預測對實現礦山長期安全、高效、最大限度的回收資源顯得尤為重要。
由于受到空區自身條件和監測技術的限制,傳統的監測手段難以準確地探明空區頂板圍巖的冒落情況,這給工程技術人員對后期的空區處理帶來了很大的困擾,尤其是對于采用無底柱分段崩落法的金屬礦山,其采空區頂板的冒落情況直接影響到后續礦體回采的安全性,而采用頂板鉆孔攝影監測技術可以較好地滿足這一工程要求,獲得可靠的空區頂板冒落情況的圖像和數據。為了獲得空區頂板受開采影響的冒落情況,自2010年3月至2011年8月,施工4個觀測鉆孔,其中CZK01與空區聯通,自2011年4月起開始逐月監測,監測儀器及現場監測相關圖片如圖2~圖5所示,現場取得監測數據見表1,利用SVM、GM(1,1)、殘差型灰色最小二乘支持向量機分別對該鉆孔觀測數據進行預測,最后由可得到預測結果見表2、表3。

圖2 JSP-1型視頻測井儀
通過圖6、圖7對3種模型預測的結果與鉆孔攝影監測結果進行了比較,充分表明:殘差型GLSSVM預測的數據曲線與實際監測數據曲線最為接近,充分顯示了這種新的信息處理和預測方法要優于單一的GM(1,1)和SVM,該模型可以避免單一人工智能方法預測的盲目性和隨機性。

圖3 攝像儀入孔照片

圖4 絞車照片

圖5 電腦監測照片

表1 某鐵礦巖石冒落高度及碴石厚度監測數據 m
3 結語
結合了最小二乘支持向量機、灰色模型等人工智能方法各自在工程應用領域上優勢,提出了基于殘差型灰色最小二乘支持向量機的智能預測方法,并簡述了其建模思路及關鍵步驟。將支持向量機、灰色模型及殘差型灰色最小二乘支持向量機模型分別用于某鐵礦覆蓋層冒落高度及碴石厚度預測,預測的結果與實際冒落情況基本吻合得。實踐表明:用殘差型GLSSVM來預測覆蓋巖層及碴石厚度的方法是有效可行的,可以推廣到相關工程領域的應用,準確及時的預測到冒落高度及碴石厚度對于地下鐵礦石資源安全、高效的回收具有極其重大的意義。

表2 冒落高度實測值與3種模型預測值 m

表3 碴石厚度實測值與3種模型預測值 m
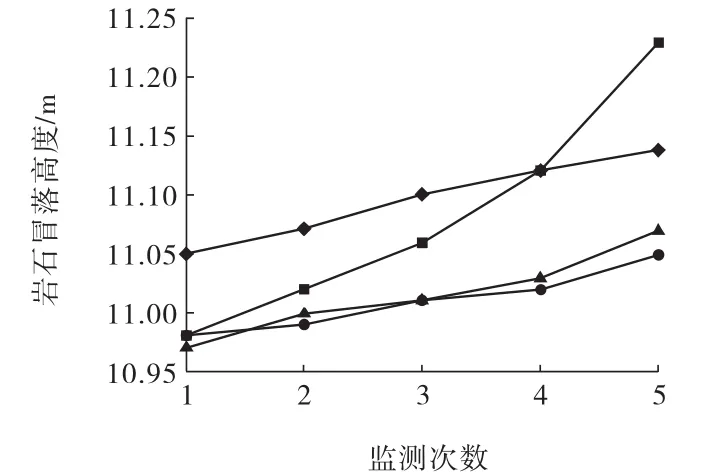
圖6 冒落高度實測值與3種模型預測值比較
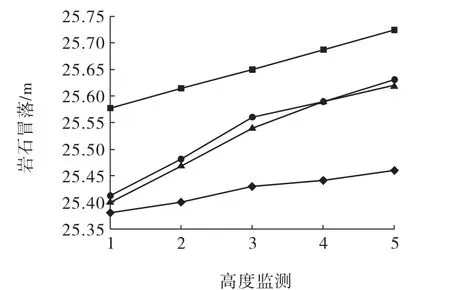
圖7 碴石厚度實測值與3種模型預測值比較
[1] 劉國生,張園遠,閆 昆,等.巢湖北部山區礦山開采現狀分析及保護措施[J].資源環境與工程,2011,25(4):353-357.
[2] 劉愛華,李夕兵,趙國彥.特殊礦產資源開采方法與技術[M].長沙:中南大學出版社,2009.
[3] 蔣 剛,林魯生,劉祖德,等.邊坡變形的灰色預測模型[J].巖土力學,2000,21(3):244-246.
[4] Suykens J K.Optimal control by least squares sup-port vector machines[J].Neural Networks,2001,14(1):23-25.
[5] 許建華,張學工,李衍達.基于最小二乘支持向量機的油氣判別技術[J].模式識別與人工智能,2002,15(4):507-509.
[6] 趙洪波,馮夏庭.非線性位移時間序列預測的進化一支持向量機方法及應用[J].巖土工程學報,2003,25(4):468-471.
[7] 馬文濤.基于灰色最小二乘支持向量機的邊坡位移預測[J].巖土力學,2010,31(5):1670-1674.
[8] 李 瀟.灰色最小二乘支持向量機在滑坡變形預測中的應用[J].測繪通報,2010(6):44-46.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
