凸包內空間散亂點集Delaunay四面體角度剖分算法
2013-08-29 07:30:24邵鐵政李世森
水道港口 2013年1期
邵鐵政,李世森
(天津大學,天津300072)
隨著計算機能力的不斷強大,三維空間內的有限元計算被越來越廣泛的使用,因此三維空間內的網格劃分也隨之不斷地被研究和改進。三維問題所采用的網格劃分單元一般是四面體、六面體。而四面體網格具有靈活性較高及能夠更好的逼近邊界的特點。四面體網格生成的算法已經有許多重要的進展,如局部變換法、Delaunay 算法、四叉樹/八叉樹算法、單元生長法、網格前沿法等,其中以Delaunay 算法應用最廣,因為其具有嚴謹的數學理論證明作為基礎,能夠由初始散亂點生成形態優化的網格,故稱為Delaunay 網格[1]。
相對于二維領域而言,目前Delaunay 算法在三維領域內的研究還不夠成熟,因為三維空間內,點、邊、面的管理及單元之間的關系更加復雜,單元重疊的可能性較大,而且不易檢驗。經研究大部分Delaunay 算法[1-3],散亂點集的外邊界進行Delaunay 三角剖分,而且需要先在散亂點內部形成一個初始的四面體剖分,然后通過交換或者尋找幾何關系將內部四面體的剖分更新為新的Delaunay 四面體剖分,這樣使得網格劃分過程的前期工作量較大。本文適用于外包面為凸的散亂點四面體剖分,不需要內部初始四面體劃分,提高了四面體網格劃分的效率。
1 三維散亂點Delaunay 四面體網格生成方法
1.1 相關概念
Delaunay 算法源于1934 年B.Delaunay 提出的Delaunay 準則[4]。
三維Delaunay 準則的定義如下:
(1)定義1:對于三維空間內由一堆散點組成的四面體網格,若每一個四面體的外接球均不包含除此四面體頂點以外的網格點,則此四面體稱為Delaunay 四面體,由這些四面體形成的網格稱為Delaunay 網格。在已知大量初始散點的情況下,若不存在多點共球的情況,則由這些散點形成的Delaunay 網格是唯一的[5-6]。
為了方便尋找Delaunay 四面體,本文引入了一個新的角度概念——球缺角。由二維Delaunay 三角形圓心角判定方法推出三維空間下的部分相關定義如下。
為了闡述方便本文引入了平面域內、域外定義:
(2)定義2:如圖1-a 以平面ABC 為例,右手展開拇指與其余四指垂直,四指沿A-B-C 方向握拳,拇指所指方向的空間,即平面ABC 上部O 點所在空間為域內,反方向的空間及平面ABC 則為域外。
四面體球缺角定義如下:
(3)定義3:如圖1-a,ΔABC 為在三維空間內一個三角形,D 為在空間內與之構成四面體的點,O 為A、B、C、D 四點的外接球球心,半徑為R。OA 為O 與ΔABC 任意頂點形成向量,則OA與ΔABC 的負法向量n的夾角就是點D 對ΔABC 的球缺角δ(0<δ<π)。
(4)四面體球缺角的特性1:由以上定義易知D 對ΔABC 的球缺角δ 唯一。
(5)四面體球缺角的特性2:在空間內當所有散亂點位于ΔABC 域內,一點與已知三角形構成Delaunay 四面體的條件是:這個點對ΔABC 的球缺角最大。
1.2 相關證明
(1)特性1 證明:根據定義3 可知,四面體球缺角即為球心與三角形所構成的圓錐的圓錐角的一半,所以得證。
(2)特性2 證明:圖1-b 為圖1-a 的正視圖,球O 過A、B、C、D 四點,r 為已知ΔABC 外接圓半徑,R 為球O 的半徑,h 為O 到ΔABC 的距離,H 為ΔABC 域內球缺高,則球缺的體積

若D-ABC 為Delaunay 四面體,則根據[定義1]只需證明球缺內不包含任何點。若證明[特性2],只需證明球內任意點D1對ΔABC 的球缺角大于D 對ΔABC 的球缺角即可。
∵h=r×cotδ,R=r/sinδ,H=h+R
∴球缺體積V(δ)=(r/sinδ+r×cotδ)2×[3×(r/sinδ)-(r×cotδ+r/sinδ)] ×π/3
=(-cos3δ+3×cosδ+2)×πr3/(3×sin3δ)
由以上推導公式可知:
對于已經固定的ΔABC 外接圓半徑r 不變,即球缺體積為以δ 為自變量的函數,則可求出并化簡得到V-δ 函數的一階導數
V′(δ)=-(1+cosδ)2×πr3/sin4δ
∴由于(0<δ<π),V′<0
得證V 與δ 反相關
如圖1-b 易知在域內,D1點對ΔABC 的球缺體積必然小于點D 對ΔABC 的球缺體積。即D1點對ΔABC球冠角δ 更大。
當域內球缺小于半球時,δ 的范圍是(π/2,π),即cotδ 為負,證明過程相同。
所以[特性2]得證。
2 編程實現散亂點四面體劃分的步驟
2.1 散亂點數據讀入
數據文件要求:散亂點按統一格式存入inputA.txt 文件中,順序為“初始點號,x 坐標,y 坐標,z 坐標”。
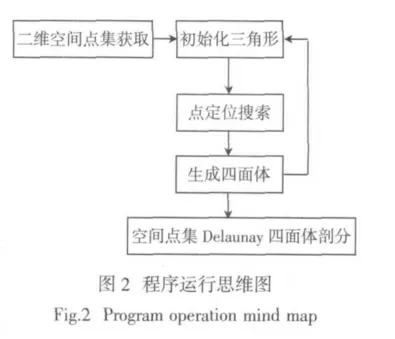
2.2 程序運行思維圖
如圖2 所示,程序運行分為以下幾個步驟:
(1)三維空間點集獲取:讀取輸入文件中的所有點的坐標,讀取內容包括“初始點號,x 坐標,y 坐標,z 坐標”。
(2)初始化三角形:讀取文件中的第一、二、三點為初始三角形。
(3)點定位搜索:由初始三角形根據四面體球缺角的特性2 在散亂點中尋找與之構成Delaunay 四面體的點,并生成Delaunay 四面體。
(4)循環運行搜索:在生成每一個四面體的同時,有3 個新的三角形生成,分別以新生成的三角形為初始三角形繼續尋找對應的點。由此循環運行直至將所有的散亂點進行四面體劃分。
2.3 搜索方法
步驟(3)中搜索方法分為以下幾個部分:
(1)確定搜索區域:為減少程序的運算量,將所有散亂點分為域內、域外2 個部分(方法見3-(3)),只對域內部分進行搜索。
(2)計算球心坐標:分別將域內的所有點按順序分別與初始三角形的3 個頂點組合,由子程序計算此空間四點的外接球的球心坐標O。
(3)計算保存向量:根據三角形頂點坐標求出三角形外接圓圓心坐標O1,向量OO1即為初始三角形負法向量。保存球心O 與任意三角形頂點形成的向量OA (根據[特性一],O 與任意頂點形成的向量與OO1夾角大小相同)。
(4)計算OA 與OO1夾角

計算出OA 與OO1夾角,并保存,以便經歷一次搜索后找出最大的夾角,并確定為最大球缺角,該角對應的點與此初始三角形構成Delaunay 四面體。
3 程序的準確性和高效性
為提高程序運行的準確性和效率,本程序進行了以下幾方面的處理:
(1)順序記錄:在每次計算所得的新三角形點數據,都按照順時針方向進行記錄,保存的新生成的數據格式符合初始運算格式,使程序可以循環進行計算。
(2)查重:由于初始三角形不同,對于每次生成的新的四面體來說有可能與前面生成的四面體重復,因此,對新生成的四面體進行查重,假設生成的新四面體4 個點的序號分別為(a,b,c,d),將(a,b,c,d)分別與之前生成的各數組對比,如果出現與(a,b,c,d)數值構成相同的數組,則取消該四面體,不存入,由此循環下去,并不斷檢驗是否重復,直到令所有點都找到Delaunay 四面體則計算過程結束。
(3)域內域外判斷:對于新生成的三角形來說一部分點位于該三角形的域內,另一部分位于域外。本程序對所有點與初始三角形的位置關系進行了預判,域外的三角形不必要進行復雜的計算,因此提高了程序的運行。四面體體積判定法:根據三維行列式正負的意義,A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3)為空間的三點,D(x0,y0,z0)與三點的行列式表示的是四面體的體積(當D 位于平面ABC 的域內時V 為正,否則V 為負)。
四面體體積

(4)避免計算誤差:本文采取了一系列方法避免計算過程中產生的誤差,其中以下2 個方法用于整個程序中相關的計算步驟。①為避免計算機在計算時出現除以0 的數學錯誤,本程序在編譯時避免了除法運算,全部使用正負號的判斷,避免了計算機儲存或計算中出現誤差的情況。②在步驟(2)、(3)中計算球心、外接圓圓心時,本程序采用克拉默法則對方程組進行求解,但是在程序編譯過程中發現,編程平臺自帶的IMSL 函數庫在計算行列式過程中DET()函數使用lin_sol_lsq()來解方程[7],對于行列式值為0 或非常接近于0 的矩陣會失效,所以本程序中使用了重新編譯的行列式計算函數進行相關計算,消除了此類計算誤差。
4 時間復雜度分析
為了對本程序的計算效率進行比較,本文進行了程序運行時間復雜度的分析[8]。圖3 為不同點數的情況下程序運行時間的趨勢線情況。
根據趨勢線可以看出計算的點的數量y 與程序運行時間x 的關系擬合曲線為y=8E-06x2,即時間與點數總量呈二次關系,該計算方法有良好的應用特性。

5 結束語
球缺角定義的提出,使Delaunay 四面體的剖分有了更加量化的方法,區別于以往的定性判斷,量化的方法誤差更小,更容易控制和比較。雖然在本方法的實踐過程中仍有一些方面不完善,但是相信在不斷地改進后,將對空間散亂點集Delaunay 四面體剖分方法的研究做出貢獻,可用于各個領域的工程應用軟件的開發。
[1]關文革,武強,賈麗萍,等.約束數據域Delaunay 四面體網格生成算法[J].華中科技大學學報:自然科學版,2005(5):67-69.GUAN W G,WU Q,JIA L P,et al. Algorithm of mesh generation of Delaunay tetrahedral in constrained domain[J]. Journal of Huazhong University of Science and Technology,2005(5): 67-69.
[2]WU Q,XU H.An approach to computer modeling and visualization of geological faults in 3d[J].International Journal of Geographical Information Systems,1993,7(6):501-524.
[3]XU H,WU Q.Design & implementation of visualization for 3d samdwich geological bodies[J]. Computer Applictations,2001,21(12):56-60.
[4]Lawson C L. Software for C1 surface interpolation,Mathematical Software III[M]. New York: Academic Press,1977: 161-194.
[5]陳學工,潘懋.空間散點集Delaunay 四面體剖分切割算法[J].計算機輔助設計與圖形學報,2002(1):93-95.CHEN X G,PAN M. Delaunay Triangulation Cutting Algorithm for A Set of Irregularly Located Spatial Points[J]. Journal of Computer Aided Design & Computer Graphics,2002(1): 93-95.
[6]王建華,徐強尋,張銳.任意形狀三維物體的Delaunay 網格生成算法[J].巖石力學與工程學報,2003,22(5):717-720.WANG J H,XU Q X,ZHANG R. Delaunay algorithm and related procedure to generate the tetrahedron mesh for an object with arbitrary boundary[J].Chinese Journal of Rock Mechanics and Engineering,2003,22(5):717-720.
[7]李麗.三維空間Delaunay 三角剖分算法的研究及應用[D].大連:大連海事大學,2010.[8]彭國倫.Fortran95 程序設計[M].北京:中國電力出版社,2010.
猜你喜歡
海峽姐妹(2020年9期)2021-01-04 01:35:44
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
山東青年(2016年1期)2016-02-28 14:25:25
中國衛生(2015年3期)2015-11-19 02:53:32
政治與法律(2014年11期)2014-03-01 02:20:40
當代修辭學(2014年3期)2014-01-21 02:30:44
