太陽能輔助熱泵的電子膨脹閥的PID控制
2013-08-31 05:15:34馬秋環唐敬峰
山東工業技術 2013年8期
關鍵詞:系統
馬秋環 唐敬峰
(青島黃海學院,山東 青島 266427)
在傳統太陽能輔助熱泵中,都是采用的毛細管來調節的,因為它有其自身的一些優點:具有無運動部件、結構簡單、價格比較便宜,在使用的時候不需另外安裝貯液器,而且充液量比較少,停止運行后冷凝器與蒸發器的壓力可以較快地達到自動平衡、能夠減輕壓縮機的啟動負載的能力等優點。不過,調節性能相對差,而且供液量不能隨工作狀況的變動而調節等一些缺點,也就慢慢的不再能滿足人們的要求。于是我們就用電子膨脹閥 (Electronic Expansion Valve,簡稱EEV)來代替毛細管。太陽能輔助熱泵系統原理圖如圖1示:

圖1 SAHPM系統循環原理示意圖
PID控制器已有半個多世紀的歷史,在人們過去幾十年的實踐中,總結出了許多實踐經驗。對于不同的對象和需求逐步對它進行了改善,再加上計算機的應用,使許多原來的在模擬PID控制器中無法實現的問題都一一得到了解決,并且產生了一系列的改進型算法。例如:不完全微分PID控制算法、帶死區的PID控制算法、和積分分離式的PID控制算法。每種PID控制算法都有自身的優缺點;選用的時候應根據被控對象的特點及特性來選擇使用哪種改進式PID控制算法。本文基于EEV需要頻繁的改變其開度的特點,選用了帶有死區的PID控制算法。
對于一些控制精度要求不高,但希望系統工作穩定的,而且執行機構不要頻繁動作的某些生產過程。人們提出了一種帶死區的PID控制算法。所謂死區的PID控制,就是在計算機中人為地設置了一個不靈區(一般為對稱區域),當偏差的絕對值小于某一值時,就不產生新的控制增量,也就是控制量保持不變;當偏差的絕對值大于該值時,就進行正常的PID運算后輸出。帶死區的PID控制算法為:

其控制特性如圖1。-β~β是一個設定好的死區,β也是一個可調參數,他的大小是由具體對象通過實驗確定的,或者根據經驗來確定。適用于控制精度要求不是太高、控制動作盡可能少的場合。
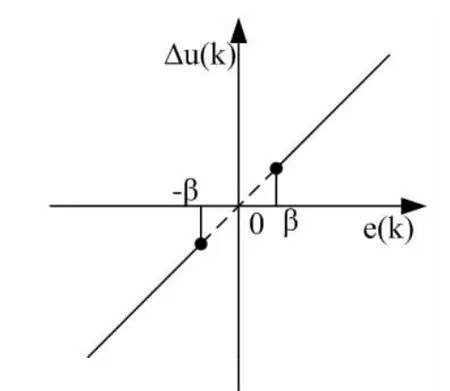
圖2 帶死區的PID控制特性圖
1 電子膨脹閥的PID控制原理
為了達到系統控制的要求,我們要考慮兩個方面:一方面,一定流量的制冷劑需要此系統室外機(也就是蒸發器)來提供。另一方面,也是EEV的穩定工作的必要條件系統正常穩定運行,室內冷凝器出口應該有一定的過冷度。因此,EEV的控制策略是以蒸發器與集熱器的出口過熱度為依據,根據過熱度值高低,進行調節電子膨脹閥的開度的大小,使輸出工質流量與蒸發器、太陽能集熱器熱負荷需要相匹。
在圖1中,EEV-PID控制系統主要是由檢測傳感器及其控制調節器來組成的,溫度傳感器檢測集熱器以及蒸發器進出口溫度,在整個控制調節系統中計算她的差值作為蒸發器出口過熱度,用TSH來表示,即:

2 電子膨脹閥的PID控制模型的建立
EEV作為太陽能熱泵空調的核心元件,對他進行精確地控制,是非常重要的,尤其是控制方法對整個系統的穩定性都起著非常重要的作用。然而控制方法的選擇也必須根據自身的特點來進行選擇。在SAHPM系統中,由于EEV的開度需要頻繁的改變,所以為了消除頻繁動作所引起的震蕩,采用帶死區的PID控制,如圖2所示。相應的控制算式為:

式(3)中,死區是一個可以調節的參數,他的具體數值可以根據實際以控制對象(或者由實驗)確定。如果值太小,使控制動作過于頻繁,達不到穩定被控對象的目的;若值太大,則系統將產生較大的滯后。
在熱泵系統增載、卸載過程中,為避免調節閥滑塊位置的頻繁變動,應當為“制冷進溫”和“制熱進溫”設定死區,如-1~+1°C。

圖3 電子膨脹閥的帶死區的PID控制模型
3 電子膨脹閥的PID控制
圖4所示為帶有PID調節器的蒸發器側的電子膨脹閥PID控制系統控制框圖。

圖4 電子膨脹閥PID控制框圖
在本系統中,電子膨脹閥采用的是直線步進電機驅動,Y(s)是指調節器輸出的膨脹閥的開度信號,m1(s)是指蒸發器側電子膨脹閥的制冷的劑流量,Vf為出口過熱度ΔT1的反饋信號,V為預設過熱度ΔTr的標準電壓信號,ΔT指的是系統輸出的實際過熱度。本系統中各個環節的傳遞函數如下:
1)PID調節器 考慮到PID調節方法,其傳遞函數為:

式(4)中:KP——調節器的比例增益,用s來表示;Td——調節器的微分時間,用s來表示;Ti——調節器的積分時間,用s來表示;E(s)——調節器的輸入量;Y(s)——調節器的輸出量。
2)蒸發器/集熱器 集熱器與蒸發器在系統供熱模式下工況作用相同,將二者傳遞函數均視為具有滯后的一階慣性環節,其傳遞函數為:

式(5)中:K——蒸發器/集熱器之間的增益;T——蒸發器/集熱器的時間常數,用s來表示;τ——蒸發器/集熱器的滯后,用s來表示;m(s)——電子膨脹閥制冷劑流量,單位為kg/s。
為了便于控制裝置的計算,將式(5)寫成級數展開形式,并取其第一項的近似表達,有:

3)電子膨脹閥(EEV)電子膨脹閥具有線性流量特性,因其開口很小,滑閥和錐閥的流動特性與薄壁小孔相近,因此可以利用薄壁小孔的流量公式來計算制冷劑流經錐閥閥口的流量。其傳遞函數可表述為:

式(1.7)中:
XV(s)——閥開度,單位為mm;Cd——流量系數;dm——閥座的平均直徑,單位為mm;φ——錐閥閥角,單位為°;ΔP——錐閥進出口壓差,Pa;ρ——制冷劑密度,單位為kg/m3。
4)傳感器及轉換電路 傳感器采用熱電阻PT100,其傳遞函數為:

式(8)中:V(s)——轉換電路輸出;T(s)——被測介質溫度;用℃來表示C——比熱系數,單位是J/(kg·℃);R——熱阻,單位為Ω;γ——特性線斜率,近似為1。
4 結論
電子膨脹閥能夠更好的適應機電一體化的發展要求。隨著微機控制技術的崛起,機電一體化已成為制冷系統發展的新趨勢。電子膨脹閥已由原來的機械式控制向電腦式控制發展,充分體現了機電一體化的發展趨勢。
通過多次試驗,電子膨脹閥的PID控制及其數學模型,提高了整個太陽能輔助熱泵系統各個參數的穩定性。
[1]劉國榮,梁景凱,等.計算機控制技術與應用[M].北京:機械工業出版社,2000:51-64.
[2]王淑青,楊樺,何濤.模糊PID復合控制在變頻空調中應用研究[J].微計算機信息,2006,22(6):42-44.
[3]胡壽松.自動控制原理[M].北京:科學出版社,2001:29-69.
[4]孫建民,楊清梅.傳感器技術[M].北京:清華大學出版社,北京交通大學出版社,2005,2.
[5]白梓運,等.電子膨脹閥及其在蒸發器過熱度自適應控制中的應用[J].制熱空調,V26,N2:21-24.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32