低溫余熱發電系統板式蒸發器過熱度控制策略研究
2013-08-31 06:06:40王艷偉
電力與能源 2013年3期
關鍵詞:系統
王 正,王艷偉
(沈陽工業大學 電氣工程學院,沈陽 110870)
0 引言
近些年來,伴隨著現代科技的飛速發展和人民生活水平的不斷提高,能源和資源的需求量日益增大,如何有效節約和利用能源變得尤為重要。據統計[1]:在人類利用的熱能中,有近50%最終以低品位廢熱直接排放,不僅浪費了大量能源,還對我國環境造成了嚴重的污染。余熱發電技術利用廢煙、廢氣、廢液等工業余熱或可燃物質作熱源,來產生蒸汽,帶動渦輪機進行發電,不僅節約能源,而且有利于環境保護。
目前,比較成熟的余熱發電技術是新工質有機朗肯循環余熱發電技術,并且已經在美國、德國等少數發達國家形成系統產品投入使用。其中余熱發電均為中低溫參數,以有機工質來代替水通過有機工質與低品位熱能的換熱推動渦輪機旋轉發電的朗肯動力循環。其中,Curran,Badr,Giampaol等人[2-3]在對有機朗肯循環的設計、運行以及有機工質選擇方面進行了較深入的研究并取得了很好的效果。通過對有機朗肯循環熱力系統及工作效率的分析,確定了循環參數,研究了8種常用的氟利昂動力黏度狀況,進而將低品位有機朗肯循環余熱發電技術推向了一個全新的層次。
國內對余熱發電技術的研究還在不斷深化,尤其對200℃左右的低溫余熱進行換熱性能系統的研究尚少。對于低溫余熱發電,由于其存在范圍十分廣泛,因此其應用的前景非常可觀。基于此,本文選取低于200℃的熱源,以低沸點R600a(中文名稱異丁烷,一種性能優異的制冷劑,特點是冷卻能力強,耗電量低,負載溫度回升速度慢)作為循環工質,通過對蒸發器過熱度控制策略的研究,提高系統的熱交換效率。
1 低溫余熱發電系統
基于有機朗肯循環低溫余熱發電系統,主要是將工業排放的廢氣、廢熱能量,最大效率的轉化為所需要的電能。整個有機朗肯循環余熱發電系統主要由膨脹機、蒸發器、冷凝器、工質泵、發電機、儲液罐、控制器組成[4]。有機工質低溫余熱發電系統如圖1所示,該系統基于有機朗肯循環(ORC)原理,用低品位能源(煙氣、廢熱、廢液)實現熱力發電,以熱能為輸入,電能為輸出。即,以低沸點有機物為循環工質,通過蒸發器進行冷熱交換回收低溫余熱,產生一定溫度和壓力的有機工質蒸汽,推動膨脹機旋轉,帶動發電機發電或輸出動力,乏氣回到冷凝器中冷凝,再由工質泵輸送至蒸發器中,完成一個循環過程[5]。

圖1 低溫余熱發電系統工作流程
2 過熱度及其控制策略
2.1 過熱度
過熱度是指其溫度超過飽和溫度的數值,板式蒸發器過熱度的大小對于低溫余熱發電系統的發電效率和穩定運行有著極其重要的影響[6]。根據有機朗肯循環的熱力學關系式可知,在熱源一定的條件下,出口溫度必然很高,過熱度也就很大。過熱度過大會造成能量的浪費,板式蒸發器不能充分利用,這是不可取的。相反,如果過熱度過小,進入板式蒸發器的有機工質得不到足夠的能量進行相變,那么出去的有機工質是氣液共存的狀態,這樣會對渦輪機造成一定的損害。因此,實時調節過熱度,對于提高低溫余熱系統的效率是很有必要的。
過熱度ΔT=T1-Ts(Ts為飽和溫度、T1為出口溫度)。當外界熱源的溫度發生變化時,板式蒸發器的出口溫度會隨之發生改變。如果提高有機工質的飽和壓力,那么它的飽和溫度也會隨之增大,有機工質吸收的熱量也會增多。假設外界的熱源溫度上升,得到如圖2所示的T—s關系變化曲線圖。
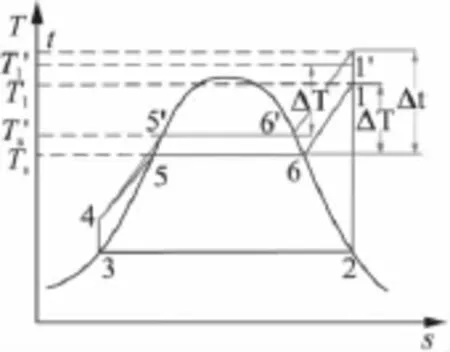
圖2 T—s曲線圖
在圖2中,板式蒸發器原先狀態是 1—2—3—4—5—6。在外界熱源升高后,板式蒸發器的出口溫度隨之升高為T1′,由于有機工質的飽和壓力并沒有改變,它的飽和溫度也沒有改變,此時的過熱度Δt=t-Ts,Δt>ΔT。為了恢復到原先的過熱度ΔT,需要改變有機工質的飽和壓力,使其遵循1′—2′—3′—4′—5′—6′,此時的飽和溫度變為Ts′,出口溫度變為T1′,過熱度重新恢復到原先水平,即Δt=t-Ts′,Δt=ΔT。
2.2 控制策略
由理論分析可以得知,過熱度可以作為控制對象,但卻不是一個可以直接控制的被控對象,而是需要通過工質泵對有機工質的質量和流量的控制,實現對ΔT控制的目的。由于工質泵是由電動機拖動的,因此對ΔT的控制也即是對電動機的控制。
在三相異步電動機的調速系統中,矢量控制是當前工業系統變頻系統應用的主流,它是將感應電機的轉矩與磁鏈進行解耦,有利于分別設計兩者的調節器,以實現對感應電機的高性能控制。這樣就可以將一臺三相感應電機等效為直流電機,通過控制獲得與直流電機控制系統同樣的靜、動態特性曲線[7]。矢量控制變頻器可以分別對異步電動機的磁通和轉矩電流進行檢測和控制,自動改變電壓和頻率,使指令值和檢測值達到一致,從而實現變頻調速,提高電機控制靜態精度和動態品質。
PWM調制技術主要有電壓空間矢量脈寬調制(SVPWM)和正弦脈寬調制(SPWM)二種。經典的SPWM控制的主要目的是使交流變頻器的輸出電壓波形盡可能的逼近正弦波,但沒有考慮輸出的電流波形;SVPWM是把逆變器和三相交流電動機看作一體,根據圓形旋轉磁場來控制交流逆變器的工作,而磁鏈的軌跡是交替使用不同的電壓空間矢量實現的。與傳統的SPWM相比,不僅使得三相交流電機的轉動脈動降低,電流波形畸變減少,而且其開關器件的開關次數可以減少1/3,母線直流電壓的利用率提高15%,因此本文選擇電壓空間矢量脈寬調制方式。
控制器應用的是模糊PID控制[8]。模糊控制是以模糊數學為基礎的一種非線性、智能的計算機數字控制。由于被控對象具有非線性、時變、大滯后等特點,導致難以建立精確的數學模型,難以確定最佳的控制器參數,因此本文過熱度控制器采用模糊PID控制器。

圖3 系統控制原理流程圖
基于此,本文針對余熱發電系統的板式蒸發器換熱原理,提出通過控制三相異步電機的轉速來控制過熱度的策略,使得板式蒸發器出口過熱度控制在額定水平,使得余熱發電系統的熱轉換效率和系統穩定性得到較大的提高,其控制原理框圖如圖3所示。
根據圖3控制原理圖進行分析,首先設定一個過熱度值。當外界熱源發生波動時,蒸發器出口溫度發生變化,過熱度便會隨著發生變化,并產生一個偏差信號。溫度控制器通過調節,發給了異步電動機輸出轉速信號,異步電機帶動工質泵旋轉,轉速和工質流量隨之改變。同時,工質的壓力將會發生變化,而壓力的改變會使飽和溫度隨之改變。通過調節和控制,使過熱度恢復到設定值,盡可能使過熱度的控制效果達到如圖2所示的T—s特性關系,進而提高熱效率。
本文主要通過對過熱度控制系統進行Simulink仿真驗證,并結合低溫余熱發電系統實驗平臺的驗證,將其對比分析,證明低溫余熱發電系統過熱度控制方法的有效性。
3 仿真參數設定
本系統設定熱源為水,變化范圍為80~100℃,系統工作在額定狀態時,熱源及工質的參數設定如下。
3.1 水的額定參數
系統工作在室溫t=20℃時,設定水的質量流量qmwn=206.7kg/h,比熱 Cw=4.19kJ/(kg/k)。
3.2 R600a的額定參數
R600a的流量為qmRn=2 088kg/h,比熱CR=0.33kJ/(kg/k),流入蒸發器的 R600a溫度接近室溫t=20℃,在蒸發器中過熱度ΔT=5℃,則R600a飽和溫度為85℃,查R600a的Ps-Ts對應參數表可知其飽和壓力為1.5MPa[9]。
3.3 離心泵型號選定及參數計算
工質泵選用離心泵(IB 80-50-315型),額定體積流量為QvN=25m3/h;轉速為nN=1 450r/min;揚程為HN=32m;額定工況下的效率為η=52%。
離心泵在額定工況下的軸功率PaN表達式為:

假設離心泵無限多葉片,則經過泵加壓的工質全壓升表達式為:

式中:P1為泵入口處工質的壓力;Ps為工質飽和壓力;Pa為軸功率;QV為體積流量。
這里設定為P1恒定值,則可得

式中:PsN為額定蒸發器壓力;PaN為額定軸功率;
根據泵的相似律,即離心泵中液體體積流量與轉速成正比,揚程與轉速二次方成正比,軸功率與轉速三次方成正比。可以得出,離心泵的轉速與工質飽和壓力(飽和溫度)的關系式[10]:

式中:n為任意轉速;nN為額定轉速。
4 仿真驗證
根據圖3控制原理框圖和上述參數設定,設計了過熱度的響應仿真以及基于SVPWM的異步電機的矢量控制仿真,過熱度溫度控制器和速度調節器均采用的是模糊PID控制器。在此基礎上,使用Simulink仿真軟件搭建低溫余熱發電系統過熱度控制系統,其具體框圖如圖4所示,各仿真參數變化曲線如圖5所示。
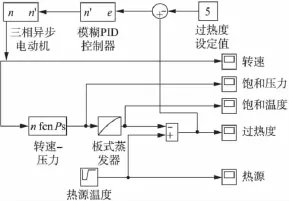
圖4 過熱度控制系統Simulink框圖
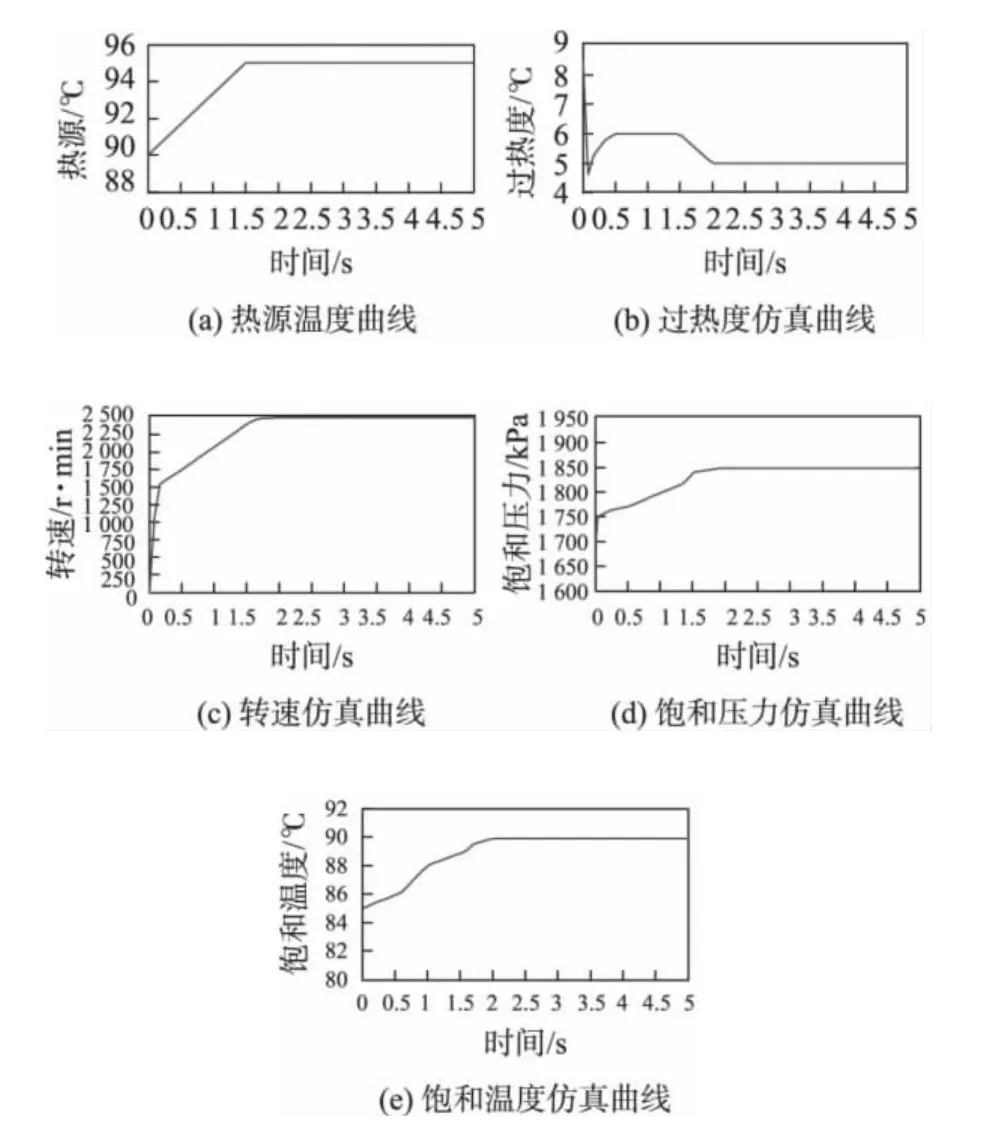
圖5 各仿真參數變化
1)仿真過程 熱源溫度由90℃上升到95℃,并一直保持95℃。作為干擾,使系統過熱度由5℃逐漸上升(見圖5(C)),分別觀察轉速、飽和壓力、飽和溫度、過熱度變化。
2)結果分析 熱源溫度由90℃升高后,過熱度增加。系統為抑制過熱度增加,調節模糊PID,提高工質泵轉速,直到擾動(熱源溫度)在1.5s處恒定(見圖5(a))。通過控制工質泵轉速,飽和壓力由1 750kPa增加到1 850kPa(見圖5(d)),飽和溫度由85℃增加到90℃(見圖5(e))。使過熱度又回到設定的額定值,由仿真曲線可知,從擾動恒定到系統過熱度恢復到設定值只用了1.5s,表明系統在熱源溫度上升時可快速穩定調節系統,使系統恢復到額定狀態。
5 實驗驗證
5.1 實驗裝置及測量
低溫余熱發電系統實驗裝置如圖6所示,工質泵、蒸發器、膨脹機、冷凝器、儲液罐,采用銅管首尾連接形成有機朗肯循環的閉路循環系統。熱源是用電加熱器加熱產生的80~100℃的熱水模擬廢氣熱源,通過熱水泵將熱水輸送到板式蒸發器中。渦輪膨脹機和發電機作為能量轉化裝置,通過發電機外接負載電阻來調節余熱發電機組的輸出功率。

圖6 低溫余熱發電系統實驗裝置
低溫余熱發電系統實驗裝置參數如下。
1)工質泵選用IH80-50-315型,流量為20 m3/h;轉速為1 450r/min;揚程為125m;渦輪機選用渦旋式膨脹機,額定功率為2kW;發電機額定輸出電壓為12V。
2)流量計的流量為3~32m3/h;工作壓力為1.6MPa;輸出信號為4~20mA;直流工作電壓為24V;壓力巡檢器的交流工作電壓為220V。
3)冷凝器為翅片管式、風冷,管內徑為8mm,管外徑為10mm,管長為9.12m。
4)蒸發器為板式換熱器,板寬為0.7m,板片間距為0.002m,板片長度為0.315m,板片單片換熱面積為0.002 3m2,換熱通道數為37個,水流通道數為18個,制冷劑通道數為19個。
5)熱源采用熱水模擬,用電加熱器給水箱中的水加熱,以保證不同實驗工況所需要的熱源溫度。
試驗中的測試設備包括溫度計、壓力計、流量計、轉速表以及測量電功率的電功率分析儀等。采集的數據通過RS-485數據總線上傳至微機,由微機在線完成實驗數據的記錄,并且進行后期數據的分析。
5.2 實驗內容
在實驗時,將熱源溫度加熱到90℃,啟動系統,直到系統穩定后開始測試。通過逐漸增加熱源溫度到95℃,測量系統測量蒸發器壓力、溫度、工質泵流量和轉速的變化,并通過數據采集卡采集到系統過熱度的變化情況。采集到過熱度數據如圖7所示。
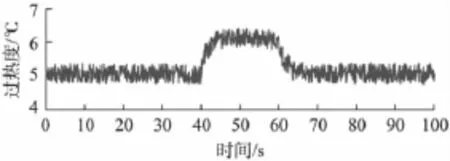
圖7 過熱度實驗數據
5.3 實驗分析
實驗結果表明,系統對于過熱度的調整具有快速性和穩定性。待系統運行穩定后,過熱度不到20s就恢復到原來的設定值。對比仿真和實驗,驗證了板式蒸發器過熱度對低溫余熱發電系統的換熱性能的影響,同時這也證明了本課題對于過熱度控制策略方案的可行性。
6 結論
本文通過對以R600a為工質的低溫余熱發電系統板式蒸發器過熱度的理論研究和實驗研究,對過熱度控制策略提高系統的換熱效率的可行性進行了驗證,同時,驗證了過熱度、工質泵轉速、工質飽和壓力以及工質飽和溫度之間的關系,這為低溫余熱發電系統的設計以及調試提供了理論依據。
[1]楊俊峰,王曼,徐洪波.國內節能減排研究現狀[J].改革與開放,2010(2):35-36.
[2]Giam Paolo Shukuru M.Energy control for a flat plate collector Rankine cycle solar power system [J].Solar Energy,1991,113(2):89-97.
[3]A.Schuster S.Karellas,E.Kakaras,H.Splieth of Energetic and economic investigation of Organic Rankine Cycle application[J].Applied Thermal Engineering 2009,29,1809-1817.
[4]胡欣,張向洪.渦卷熱馬達余熱利用發電技術[J].節能與環保,2009,15(1):78-79.
[5]顧偉.低品位熱能有機物朗肯動力循環機理研究和實驗驗證[D].上海交通大學,2010.
[6]顧偉,翁一武,王艷杰.低溫熱能有機物發電系統熱力分析[J].太陽能學報,2008,29(5):608-612.
[7]余秋實,王秋曉.異步電機SVPWM矢量控制系統仿真[J].機電工程,2010,27(1),76-78,81.
[8]趙永娟,孫華東.基于Matlab的模糊PID控制器的設計和仿真[J].微計算機信息,2009,25(1):48-49.
[9]王輝濤,王華.低溫太陽能熱力發電有機朗肯循環工質的選擇[J].動力工程,2009,29(3):287-291.
[10]陳乃祥,吳玉林.離心泵[M].北京:機械工業出版社,2003.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32