汽車車燈調光系統簡述
2013-09-02 13:07:38陳文強韋興民趙福全
汽車電器 2013年2期
王 燾,陳文強,韋興民,趙福全
(吉利汽車研究院,浙江 杭州 311228)
汽車車燈是汽車的重要功能件,對于汽車前組合燈中的遠近光的作用更是汽車主動安全的重要組成部分。燈光在保證照亮前部道路的同時,還要確保不對對面車輛產生眩目影響。
汽車車燈中前組合燈最為復雜。一般來說,前組合燈主要由遠光、近光、轉向信號燈、位置燈等組成。其中遠光和近光的配光是燈具設計的重點和難點。為了保證裝車后前照燈有足夠的照度和足夠寬的照明范圍外,還要不眩目,同時需要針對不同路況引起的燈光偏離進行調整,這就需要有車燈調光系統來保持裝車后的前照燈的照射光型。總的來說,車燈調光結構的實現形式主要有螺桿調節、齒輪傳動調節、電動機調節以及自適應調節 (AFS)等4種。下面主要介紹4種調光系統的原理、特點及其在車燈上的應用。
由于汽車懸架的影響,當汽車裝載情況或者速度發生變化時,車身相對于路面的傾斜角往往發生很大的變化,這將引起近光燈照明距離和照明方向的改變:當汽車裝載增加或者加速時,汽車會出現后部下降、前部升高的現象,這將導致車燈光線抬高,使得迎面來車的駕駛員眩目,同時會造成駕駛員視野變窄;當汽車突然制動時,會出現前部下降、后部升高的現象,這時車燈光線壓低,大部分光線照射地面,車燈照射功能失效。
1 車燈配光
通過配光設計,要保證遠光具有足夠大的發光強度和足夠寬的照明范圍,來滿足駕駛員有足夠的視覺范圍,同時保證近光對迎面車輛使用者不眩目。車燈實際照射效果如圖1所示。
車燈射出的光型需滿足配光圖 (圖2)的照度要求, 具體如下[1]。
1)B50L稱作防眩點,距前照燈50 m處迎面而來的車輛駕駛員眼睛的位置。
2)50R、75R分別代表本車右邊距前照燈50m、75m處路邊的照度值。
3)25L及25R分別表示燈具前方25 m處道路的左、右路邊的照度值。
4)Ⅲ區,又稱為防眩區,表明車燈的眩目情況。
5)Ⅳ區為過渡區,表示汽車25~50m范圍內車道全寬的照明情況。
6)Ⅰ區稱作近距離照明區,表示距車前25 m以內的道路照明情況。
2 調光系統
調光系統從控制方式上可分為手動調光系統和自動調光系統;從實現結構上可以分為螺桿調節、齒輪傳動調節、電動機調節及自適應調節 (AFS)等4種調節。由于手動前照燈調光裝置必須坐在駕駛座上才能被操作[2],因此除了自適應調光系統外,其余3種方式均為手動調光系統,在駕駛室內均有相應的控制裝置。其中電動機調節經常與螺桿、齒輪組合調節。
調光系統的控制方式分為機械式、液壓式、氣動式、可調電阻——電動機式 (包含先進的AFS系統)。機械式、液壓式和氣動式多用于商用車領域,調節精度不高,目前已經基本由電動機調節式替代,如圖3所示。
調光系統要便于操作者調節,同時要有足夠的可靠性,不能引起燈光的跳動和方向的改變以及燈體本身的變形。
調光系統通過調節燈光反射碗 (或燈組)的角度來實現光束的調節。光束調節范圍需滿足表1所示值[3]。

表1 光束調光范圍
3 螺桿調節系統
3.1 結構原理
螺桿調節是通過本身的螺紋將旋轉運動轉換為反光碗 (或燈組)的旋轉角度來實現車燈的調光運動,如圖4所示。
2個調節螺桿與球頭固定點的夾角一般為90°,如圖5所示。當轉動調節螺桿,調節螺母前后移動,帶動反光碗旋轉。
3.2 特點及應用
螺桿調節是所有調光結構中最經濟,也是最常用的一種結構,廣泛用于各種前照燈的調光系統中。缺點是需要燈體有足夠的空間來保證螺桿的伸縮運動;螺桿直線運動轉化為反光碗的旋轉運動時經常會失效。因此,在設計時要考慮以下幾點。
1)反光碗旋轉時,調節螺桿端部從調整螺母中脫出,不能回調 (圖6)。
2)過度調節螺桿時,螺桿頂住反光碗,調節卡死 (圖7)。
3)過度調節導致反光碗與其他周邊零部件干涉、卡死,或光線被其他件遮蔽,調光失效 (圖8,調光時反光碗不可以與黃色裝飾邊框干涉)。
4 齒輪調節系統
4.1 結構原理
齒輪調節是通過本身的螺紋將旋轉運動轉換為反光碗 (或燈組)的旋轉角度來實現車燈的調光運動。一般采用錐齒輪進行換向傳動,如圖9所示。也有采用多級直齒輪進行換向傳動,如圖10所示。
4.2 特點及應用
齒輪調節具備占用空間小、調節范圍大的特點。當前照燈設計空間不足時,或者需要對調光機構進行換向調節 (如前霧燈需從前部調節)時,經常采用此結構。
齒輪調節的缺點是多級齒輪 (尤其是工程塑料件)的結構穩定性較差,極易造成調光系統卡死、失效現象。目前多采用與螺桿調節組合使用,使得車燈的調光系統既穩定又便于調節 (多角度調節)。調光系統既可以從后部進行調光,對于單燈組裝調光測試極為方便,同時也可以從上部進行調光,便于整車下線調光和后續維修。圖11為實際齒輪調節的應用圖。
5 電動機調節系統
5.1 結構原理
電動機調節系統中的電動機多采用小功率直線型調節電動機,這是一種用于短焦距前照燈的光在垂直方向上可達距離的調節設備[4]。 根據安裝位置不同,一般分為外接型電動機和內置式電動機,如圖12所示。
駕駛員通過安裝在駕駛室內的調光開光 (圖13),將不同的電壓輸出給調節電動機。電動機根據自身特性曲線圖及輸入的電壓值,控制電動機調整桿的運動行程,從而達到調光的目的。
5.2 特點及應用
電動機調節是一種半自動調光方式,無論在整車生產過程中還是在后續的維修服務中,都降低了勞動量,提升了調光效率和精度。
由于電動機有電壓限制問題,因此此類調節系統在設計時,要避免調光開關的電壓調節范圍超出電動機的最大行程,造成電動機空轉或者停轉而導致調光系統失效。
目前,前照燈調光系統中多數采用電動機與螺桿、齒輪結合的結構,充分發揮各個結構的優點,形成了多種多樣的調光機構。圖14即為2種常見的調光結構。
6 自適應調節 (AFS)系統
6.1 結構原理
AFS(Adaptive Front-lighting System)是指燈光的分布能夠根據汽車行駛的各種狀況來進行調整,以達到最好的照明效果,從而增加駕駛的安全性和舒適性。AFS所體現的理念:為不同的行車條件提供最優的前方照明組合。簡言之,城市交通中盡可能寬,高速行駛時盡可能遠。具體可以實現以下功能:①彎道隨動調節 (彎道模式);②水平自動調整;③高速調節模式;④其他模式 (如雨天模式等)。
為實現以上功能,傳統的調光 (靜態)已經不能滿足要求,或者說傳統調光系統已經是狹義的調光系統。廣義的調光系統需要多個電子器件來支持。一般AFS系統包括:ECU控制器、高度傳感器、轉向盤轉角傳感器、速度傳感器、旋轉執行器 (調光電動機)等組成。自適應式AFS前照明調光系統如圖15所示。
AFS系統一般使用投射單元作為旋轉核心,其大致的結構如圖16所示,一個普通旋轉核心包括水平旋轉電動機、旋轉框架和轉向旋轉電動機等部件。其中傳動的調光電動機控制車燈的水平角度,這樣車燈整體就可以繞2個互相垂直的旋轉軸進行調整。
對于彎道隨動調節,主要依據汽車行駛時的瞬時速度和轉向盤轉角 (可換算為前輪偏轉角)的輸入值來確定。具體可以理解為:前輪偏轉角小時,頭燈轉角要小;前輪偏轉角大時,頭燈轉角也要大。當車速較高時,駕駛員相對注重遠視距的路面情況,頭燈轉角相對大一些;車速較低時,駕駛員相對注重較近視距的路面情況,頭燈轉角相對小一點[5]。
一般前照燈的左右轉向調節的最大角度為外側旋轉15°左右,內側旋轉7°左右。其中隨動左右轉向的調節角度可參見表2。
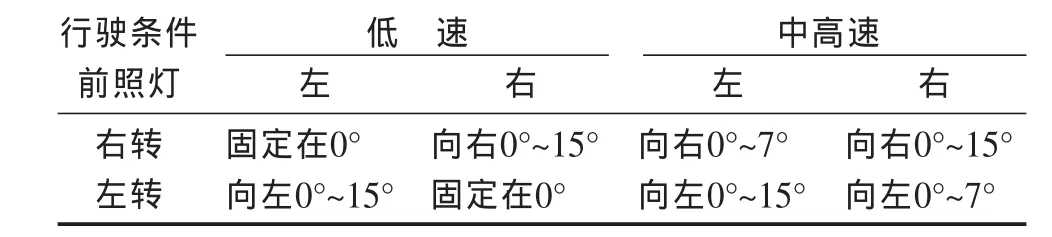
表2 光束調光范圍
對于水平自動調整,主要依據車身高度傳感器來判定整車的俯仰角度,用于調整光軸的傾斜角度,以實現前照燈光照滿足法規要求。
對于高速調節模式,主要是依據車速信號來判定整車的行駛路況,自動調節光束角度,使光束聚攏,提高前照燈的照射距離。一般高速模式的速度判定值為80km/h。
對于雨天模式,主要是依據雨量傳感器或者其他環境傳感器來判斷汽車所處的環境情況,來實時調節前照燈光束照射角度和高度,避免產生照明失效和地面反光 (眩目)現象。此模式已經屬于智能化的一種體現。后續AFS在整車安全方面將更加完善和智能。
6.2 特點及應用
AFS系統的出現可以說是前照燈調光控制技術的一項革新,將傳統的僅有照明功能的前照燈融入了汽車智能一體化中,使得前照燈具備了 “左顧右盼”的功能,這對提高汽車行駛的安全性具有重要作用。
由于AFS系統具備多項智能化功能,現廣泛應用于高端汽車的前照燈上,并且有逐步標配的趨勢。
7 結論
前照燈調光方式主要有螺桿調節、齒輪調節、電動機調節以及AFS調節。按結構分析,螺桿調節最為簡單、實用,但是需要考慮多項限制因素;齒輪調節具備所占尺寸小、可以實現換向調節等優良特性;電動機調節具有調節角度精確,便于控制等特點,已經逐步取代其他控制方式 (與氣壓式、液壓式控制比較)。表3為主流車型的前照燈調光方式。

表3 主流車型的前照燈調光方式
隨著科技的發展以及智能化的技術逐步應用于汽車控制中,前照燈調光系統已經由傳統的機械手動調節逐步演化為自動調節,直至自適應調節(AFS),使得前照燈由單純的遠近光調節轉化為動態的 “左顧右盼”和高低自動調節,汽車前照燈照明系統更加完善,更加人性化。
文中只是對前照燈調光系統從結構上和控制方式上進行了簡單闡述。雖然只是針對汽車前照燈,但是從控制方式上可以推廣到汽車所有照明系統的設計上。汽車照明系統未來將弱化各個單燈照明功能,通過分析外界各種環境參數及駕駛者需求,來共同提高整車的安全與駕駛舒適性,實現汽車交通智能化。
[1]姜兆慶,郭淑紅,等.汽車前照燈配光性能測試方法的研究[J].汽車技術, 1996 (1):30-35.
[2]GB 4599—2007, 汽車用燈絲燈泡前照燈[S].
[3]GB 4599—2004,機動車運行安全技術條件[S].
[4]張獻軍,孫新普,李海方.汽車前照燈光束水平調節系統的分析[J].汽車電器, 2009 (8):11-15.
[5]劉新良,遲永濱.汽車AFS頭燈隨動轉向規律研究[J].機械設計與制造,2011(8):131-133.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50