基于混合阻尼控制的車(chē)輛半主動(dòng)懸架可調(diào)性研究*
2013-09-04 05:06:32郭孔輝王金珠郭耀華
汽車(chē)技術(shù) 2013年3期
郭孔輝 王金珠 郭耀華 薛 冰
(1.吉林大學(xué) 汽車(chē)仿真與控制國(guó)家重點(diǎn)實(shí)驗(yàn)室;2.湖南大學(xué) 汽車(chē)車(chē)身先進(jìn)設(shè)計(jì)制造國(guó)家重點(diǎn)實(shí)驗(yàn)室)
1 前言
天棚阻尼控制作為經(jīng)典的控制邏輯,由于其算法簡(jiǎn)單工程易于實(shí)現(xiàn)且魯棒性較強(qiáng),現(xiàn)已經(jīng)廣泛應(yīng)用于中高端汽車(chē)的半主動(dòng)控制系統(tǒng)。但天棚控制從原理上只能以降低汽車(chē)安全性來(lái)改善乘坐舒適性,而混合控制策略則在天棚控制的基礎(chǔ)上結(jié)合地棚控制,能在安全性和乘坐舒適性之間折衷,從而使懸架的整體性能得到提升。
對(duì)混合控制策略的研究主要集中在如何使天棚、地棚阻尼系數(shù)Csky、Cgnd及阻尼分配系數(shù)α與整車(chē)進(jìn)行匹配。文獻(xiàn)[1]采用免疫優(yōu)化算法對(duì)α及Csky的匹配進(jìn)行了一些探討和研究。而現(xiàn)代車(chē)輛懸架系統(tǒng)通常采用與路面和車(chē)速自適應(yīng)的控制策略,這時(shí)更關(guān)注懸架的可調(diào)性[2]。為此,本文通過(guò)優(yōu)化懸架參數(shù)確定了懸架剛度ks和Csky及Cgnd,使混合控制策略下車(chē)輛半主動(dòng)懸架有一個(gè)合適的可調(diào)范圍。通過(guò)改變參數(shù)α使車(chē)輛的平順性和安全性相對(duì)于被動(dòng)懸架有所改善。
2 懸架模型的建立
2.1 路面輸入
分析懸架性能時(shí)首先要用到路面的隨機(jī)輸入。當(dāng)車(chē)速為定值時(shí),速度的時(shí)域功率譜即為白噪聲信號(hào)[3],本文采用積分濾波白噪聲法產(chǎn)生C級(jí)隨機(jī)路面作為輸入。
式中,xr為路面垂直方向位移;n0為參考空間頻率,n0=0.1m-1;Gxr(n0)為路面不平度系數(shù);v0為汽車(chē)行駛速度;ω(t)為單位白噪聲;f0為下截止頻率。
在Simulink環(huán)境下采用積分濾波白噪聲法產(chǎn)生如圖1所示C級(jí)隨機(jī)路面。
2.2 1/4車(chē)輛懸架簡(jiǎn)化模型
在研究基于天棚、地棚半主動(dòng)懸架混合控制策略時(shí),采用如圖2所示的1/4車(chē)輛懸架簡(jiǎn)化模型,即忽略了輪胎阻尼,用定剛度的彈性元件來(lái)近似代替輪胎。其中,mb為簧載質(zhì)量,mw為非簧載質(zhì)量,ks為懸架剛度,kt為輪胎剛度,c為懸架阻尼系數(shù),z0、zw和zb分別為路面輸入、輪胎和車(chē)身的垂直位移。
由牛頓第二定律得到2自由度1/4車(chē)輛懸架垂向運(yùn)動(dòng)微分方程:
實(shí)際上理想的天棚、地棚阻尼器不存在,半主動(dòng)懸架簧載和非簧載質(zhì)量之間通過(guò)一個(gè)CDC(Continuous Damping Control)減振器來(lái)衰減振動(dòng)。圖3為實(shí)際1/4車(chē)輛半主動(dòng)懸架2自由度簡(jiǎn)化模型,其中cs為CDC減振器阻尼系數(shù)。
由牛頓第二定律得到其運(yùn)動(dòng)微分方程:
3 混合控制策略的實(shí)現(xiàn)
混合控制策略綜合天棚控制策略和地棚控制策略,使車(chē)輛舒適性和安全性都得到了改善。混合控制策略的基本思想是在簧載質(zhì)量和非簧載質(zhì)量上加一個(gè)與慣性系鏈接的阻尼器,產(chǎn)生的阻尼力分別與車(chē)身和輪胎的垂直運(yùn)動(dòng)速度成正比,能起到同時(shí)衰減車(chē)身和輪胎振動(dòng)的目的。
由于理想的慣性系不存在,因此只能以天棚、地棚模型為指導(dǎo),結(jié)合半主動(dòng)懸架的CDC減振器可調(diào)范圍來(lái)研究一種混合控制算法,通過(guò)調(diào)節(jié)阻尼系數(shù)使減振器產(chǎn)生的阻尼力同時(shí)與車(chē)身和輪胎絕對(duì)速度成正比,從而使車(chē)輛的舒適性和安全性都能得到改善。
本文采用一種連續(xù)的混合阻尼控制策略,控制算法如下:
式中,Cs、Cg為實(shí)際天棚、地棚阻尼系數(shù);Csky、Cgnd為理想天棚、地棚阻尼系數(shù);Cmax、Cmin為CDC減振器可調(diào)的最大、最小阻尼系數(shù)。
通過(guò)調(diào)整阻尼分配系數(shù)α,可改變天棚控制力和地棚控制力在混合控制策略中所占的比重,使汽車(chē)能夠根據(jù)實(shí)際行駛工況和路面變化來(lái)改變懸架的阻尼控制規(guī)律,保證了懸架在任何工況下的最優(yōu)性能。
4 懸架參數(shù)匹配
4.1 懸架剛度的匹配
在被動(dòng)懸架中,彈簧剛度和減振器阻尼系數(shù)固定不變,因此設(shè)計(jì)被動(dòng)懸架時(shí),只需根據(jù)實(shí)際要求在車(chē)輛舒適性和安全性之間取一個(gè)折衷[5]。而基于混合控制策略的半主動(dòng)懸架,如果懸架參數(shù)選擇不當(dāng),則會(huì)使車(chē)輛的舒適性或安全性可調(diào)范圍很小,甚至?xí)?dǎo)致某一方面的惡化。因此,在半主動(dòng)懸架的設(shè)計(jì)過(guò)程中,懸架的參數(shù)選擇非常重要。
根據(jù)1/4車(chē)輛的垂向運(yùn)動(dòng)微分方程 (2)、方程(3)和混合控制算法公式(4),在 Simulink 環(huán)境下搭建了1/4車(chē)輛的被動(dòng)懸架和半主動(dòng)懸架模型,并采用上述積分濾波白噪聲法產(chǎn)生的C級(jí)隨機(jī)路面作為輸入。仿真結(jié)果將車(chē)身加速度z¨b、懸架動(dòng)撓度zw-zb及車(chē)輪動(dòng)載荷Fd輸出到Matlab工作空間做性能分析。懸架的基本參數(shù)如表1所列,其中減振器阻尼為被動(dòng)懸架阻尼,懸架剛度為待優(yōu)化值。
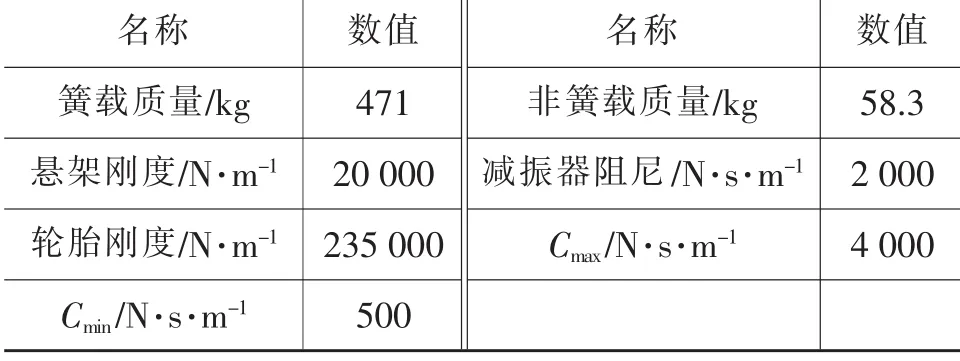
表1 被動(dòng)/半主動(dòng)懸架模型主要參數(shù)
考慮到在各種行駛工況下對(duì)汽車(chē)平順性的不同要求,首先建立如下目標(biāo)函數(shù):
式中,q為權(quán)系數(shù),取值大時(shí)趨近于平順性,取值小時(shí)趨近于安全性;i起比例調(diào)節(jié)作用,使汽車(chē)的安全性和平順性評(píng)價(jià)指標(biāo)達(dá)到同一數(shù)量級(jí)便于比較;N為采樣數(shù)據(jù)長(zhǎng)度。
為分析懸架剛度對(duì)平順性和安全性可調(diào)范圍的影響,將懸架剛度ks和阻尼分配系數(shù)α視為兩個(gè)獨(dú)立的變量,ks和 α 分別從5000~30000 N/m和0~1之間分為若干等份,將ks和α進(jìn)行多次賦值,每賦值一次進(jìn)行一次仿真。在分析平順性可調(diào)范圍時(shí)令q=1,分析安全性時(shí)令q=0。半主動(dòng)懸架和被動(dòng)懸架的目標(biāo)函數(shù)值之差H=JS-JP為懸架的改善系數(shù),當(dāng)H<0時(shí)懸架相應(yīng)性能得到改善。本文將ks和α都分為50等份,經(jīng)過(guò)2500次仿真得到2500個(gè)H值并繪制H特性圖。H特性圖顯示了在不同ks值下,懸架在α值從0~1改變時(shí)其平順性Hr和安全性Hs的變化特征及范圍。
圖4和圖5為α變化時(shí)Hr-ks和Hs-ks特性曲線(xiàn),圖4自上向下α從1~0逐漸減小,ks取值在22500~29000 N/m之間時(shí)平順性可得到比較明顯的改善,且α=0時(shí)平順性變化較小;圖5自上向下α從 0~1逐漸增大,當(dāng) ks在22500~30000 N/m 變化時(shí)安全性改善比較明顯,且α=1時(shí)安全性變化較小。
ks的取值要使在α變化時(shí)安全性和平順性相對(duì)被動(dòng)懸架都能得到改善,且當(dāng)平順性最好時(shí)安全性變化較小,安全性最好時(shí)平順性變化較小。圖5顯示當(dāng)ks>22500 N/m時(shí),增大ks可使安全性變好;圖4顯示當(dāng)ks>26000 N/m時(shí),平順性隨著ks的增加逐漸變差。本文優(yōu)先考慮平順性,因此ks比較理想的取值為26000 N/m。
4.2 Csky、Cgnd的匹配
在確定Csky、Cgnd時(shí),本文首先由經(jīng)驗(yàn)公式C=給Cgnd初步取一個(gè)值,其中,C為理想天棚(地棚)阻尼系數(shù),m為簧載(非簧載)質(zhì)量,k為懸架(輪胎)剛度。然后對(duì)Csky從500~10000 N·s/m每隔500 N·s/m分段賦值,分析懸架Hr和Hs在α從0~1之間取值時(shí)的變化[7]。
由經(jīng)驗(yàn)公式 Cgnd=并帶入懸架參數(shù)可得到理想地棚阻尼系數(shù)Cgnd的初始值CG=3701.4 N·s/m。
圖6為Csky取不同值時(shí)懸架的Hr特性圖,可看出Csky變大時(shí)懸架Hr曲線(xiàn)逐漸改善,即α=1時(shí)懸架平順性改善較好。從圖6、圖7可以看出,當(dāng)Csky>4500 N·s/m時(shí)懸架Hr和Hs曲線(xiàn)幾乎不再變化。本文Csky取臨界最大值4500 N·s/m。
分析 Cgnd時(shí),取 Csky=4500 N·s/m, 對(duì) Cgnd從500~10000 N·s/m每隔50 N·s/m分段賦值。圖8和圖9顯示,隨著Cgnd增大懸架Hr和Hs特性都逐漸變好,但當(dāng) Cgnd>6000 N·s/m 時(shí) Hr、Hs曲線(xiàn)幾乎都不再變化。因此Cgnd取臨界最大值6000 N·s/m。
4.3 參數(shù)驗(yàn)證
根據(jù)以上確定的參數(shù),在simulink環(huán)境下建立基于混合控制策略的車(chē)輛半主動(dòng)懸架模型,路面輸入采用白噪聲積分法產(chǎn)生的C級(jí)隨機(jī)路面,車(chē)速為40 km/s[8]。圖10為α=1時(shí)半主動(dòng)懸架與被動(dòng)懸架的車(chē)身加速度對(duì)比,圖11為α=0時(shí)半主動(dòng)懸架與被動(dòng)懸架非簧載質(zhì)量加速度對(duì)比,圖12顯示了平順性指標(biāo)Hr隨α的變化曲線(xiàn),圖13顯示了安全性指標(biāo)Hs隨α的變化曲線(xiàn)。Hs-α曲線(xiàn)同時(shí)也說(shuō)明使安全性指標(biāo)Hs最好的α值不一定是0。本文大概在α=0.5時(shí)安全性達(dá)到最好。
從以上仿真曲線(xiàn)來(lái)看,根據(jù)實(shí)際路況調(diào)整α可以快速實(shí)現(xiàn)使車(chē)輛傾向于平順性或傾向于安全性,因此不管車(chē)輛行駛在何種路面或工況,都能始終保持車(chē)輛駕駛性能最佳。
5 結(jié)束語(yǔ)
討論了基于混合控制的車(chē)輛半主動(dòng)懸架可調(diào)性與懸架剛度、理想天棚地棚阻尼系數(shù)的關(guān)系。把懸架簧載質(zhì)量加速度和懸架動(dòng)撓度的加權(quán)加速度均方根值作為平順性指標(biāo),非簧載質(zhì)量加速度均方根值作為安全性指標(biāo),通過(guò)simulink仿真得到在α變化時(shí)K、Csky和Cgnd取值對(duì)懸架可控范圍的影響。經(jīng)分析對(duì)比Hr、Hs特性圖,最終確定了與本車(chē)參數(shù)相匹配的K、Csky和Cgnd,確保了車(chē)輛可根據(jù)實(shí)際車(chē)速和路況通過(guò)改變?chǔ)羴?lái)選擇傾向于平順性或安全性。
1 殷智宏,郭孔輝,宋曉琳.基于辨識(shí)模型的半主動(dòng)懸架控制策略研究.湖南大學(xué)學(xué)報(bào),2010,37(12):1~10.
2 喻凡,郭孔輝.車(chē)輛懸架的最優(yōu)自適應(yīng)與自校正控制.汽車(chē)工程,1998,20(4):1~9.
3 ESLAMINASAB N,GOLNARAG HIF.A semi-active control strategy for vibration isolation to improve the ride comfort of vehicle.International Journal of Modelling,Identification and Control,2009,7(3):281~293.
4 嚴(yán)天一,劉大維,師忠秀,等.基于基于地棚控制的半主動(dòng)懸架車(chē)輛道路友好性仿真.農(nóng)業(yè)機(jī)械學(xué)報(bào),2007,38(1):12~16.
5 余志生.汽車(chē)?yán)碚?北京:機(jī)械工業(yè)出版社,2009.
6 趙研,寇發(fā)榮,方宗德.汽車(chē)天棚控制半主動(dòng)懸架模型仿真與性能分析.計(jì)算機(jī)仿真,2006,23(11):233~236.
7 顧信忠,張鐵山.減振器阻尼比的確定.農(nóng)業(yè)裝備與車(chē)輛工程,2010,19(12):28~31.
8 中國(guó)國(guó)家標(biāo)準(zhǔn)局.GB/T 4970-2009.汽車(chē)平順性試驗(yàn)方法.北京:中國(guó)標(biāo)準(zhǔn)出版社,2009:1~16.
猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
建材發(fā)展導(dǎo)向(2021年14期)2021-08-23 00:57:04
建材發(fā)展導(dǎo)向(2021年23期)2021-03-08 01:05:44
能源工程(2020年6期)2021-01-26 00:55:22
中華養(yǎng)生保健(2020年5期)2020-11-16 01:44:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
