基于LS-DYNA正面臺(tái)車(chē)試驗(yàn)的有限元仿真
2013-09-04 05:07:02王玉超亓向翠楊榮山
汽車(chē)技術(shù) 2013年7期
關(guān)鍵詞:有限元
王玉超 亓向翠 楊榮山 許 妮
(廣州汽車(chē)集團(tuán)股份有限公司汽車(chē)工程研究院)
1 前言
目前,對(duì)正面臺(tái)車(chē)的仿真主要采用多體動(dòng)力學(xué)Madymo軟件[1,2]。 Madymo軟件建模簡(jiǎn)單,計(jì)算效率高,但其中座椅剛度、地板剛度和IP剛度等輸入?yún)?shù)必須通過(guò)試驗(yàn)才能得到。為克服Madymo軟件臺(tái)車(chē)建模的缺點(diǎn),本文利用LS-DYNA軟件建立了臺(tái)車(chē)有限元模型,參照臺(tái)車(chē)試驗(yàn)中假人的運(yùn)動(dòng)姿態(tài)進(jìn)行了相關(guān)性分析,通過(guò)對(duì)比仿真與試驗(yàn)的C-NCAP假人評(píng)分部位的曲線和運(yùn)動(dòng)姿態(tài),表明在LS-DYNA環(huán)境下建立的臺(tái)車(chē)有限元模型能夠真實(shí)地反映試驗(yàn)狀態(tài),為乘員約束系統(tǒng)的優(yōu)化奠定了基礎(chǔ)。
2 有限元仿真模型
乘員約束系統(tǒng)的臺(tái)車(chē)有限元模型如圖1所示。該模型包括部分乘員艙白車(chē)身、轉(zhuǎn)向管柱和轉(zhuǎn)向盤(pán)、座椅、儀表板、假人、氣囊和安全帶等共326260個(gè)單元,其中殼單元193087個(gè),實(shí)體單元131173個(gè),一維單元700個(gè)。
2.1 車(chē)體結(jié)構(gòu)
為減少運(yùn)算時(shí)間,在y=0處截取1/2車(chē)身結(jié)構(gòu),只保留影響假人姿態(tài)的結(jié)構(gòu)零件(如地板、前圍、加速踏板等),并將座椅后部的地板設(shè)置為剛體,用來(lái)輸入臺(tái)車(chē)碰撞的加速度曲線。為使臺(tái)車(chē)運(yùn)行穩(wěn)定,剛體地板一直延伸到前圍。儀表板只保留了影響假人傷害值的零件,刪去了空調(diào)風(fēng)道、儀表盤(pán)、雨刮蓋板等。因風(fēng)擋玻璃幾乎不變形,所以設(shè)為剛體。地毯和擱腳板采用實(shí)體單元模擬,采用*MAT_FU_CHANG_FOAM材料模型,賦予泡沫屬性。
2.2 轉(zhuǎn)向管柱和轉(zhuǎn)向盤(pán)
采用球鉸或萬(wàn)向鉸模擬萬(wàn)向節(jié);采用圓柱鉸模擬下轉(zhuǎn)向管柱的運(yùn)動(dòng)關(guān)系;采用移動(dòng)鉸和彈簧單元模擬上轉(zhuǎn)向管柱的壓潰。模擬示意如圖2所示。
上轉(zhuǎn)向管柱的彈簧主要用于模擬轉(zhuǎn)向管柱在碰撞過(guò)程中的壓潰力,輸入試驗(yàn)的壓潰曲線,如圖3所示。特別注意,在關(guān)鍵字*ELEMENT_DISCRETE中,S項(xiàng)的含義為scale factor on forces,必須設(shè)置為1.0。轉(zhuǎn)向盤(pán)通過(guò)展開(kāi)的氣囊間接與假人胸部接觸,對(duì)假人胸部的傷害影響較敏感,盡管在臺(tái)車(chē)試驗(yàn)中轉(zhuǎn)向盤(pán)變形微小,也不能以剛體處理,應(yīng)該賦予真實(shí)的材料。
2.3 座椅
座椅分為3層,上層為shell單元,設(shè)置與假人接觸;中層為泡沫實(shí)體單元;下層為shell單元,當(dāng)假人壓縮座椅時(shí)起支撐作用。在primer軟件中,采用seatsquash命令模擬假人壓縮座椅的過(guò)程,能夠?qū)⒓偃说腍點(diǎn)壓到正確位置,達(dá)到與試驗(yàn)假人較一致的姿態(tài)。為縮短運(yùn)算時(shí)間,刪去了座椅后背,如圖4所示。為了在運(yùn)算過(guò)程中不出現(xiàn)負(fù)體積,座椅的泡沫實(shí)體單元采用四面體。
2.4 假人
采用 FTSS (First Technology Safety Systems)公司的HybridⅢ50th男性假人,它適用于100%全正面碰撞和40%偏置碰撞,裝備有頭部加速度計(jì)、胸部加速度計(jì)、骨盆加速度計(jì)、頸部上部力計(jì)、頸部下部力計(jì)、胸部脊骨力計(jì)、腰部脊骨力計(jì)、大腿骨力計(jì)、膝關(guān)節(jié)力計(jì)、小腿上脛骨力計(jì)、小腿下脛骨力計(jì)、胸部位移傳感器和膝蓋位移傳感器,與試驗(yàn)假人具有良好的仿真度。
假人定位按照試驗(yàn)假人的定位要求,其定位參數(shù)見(jiàn)表1。
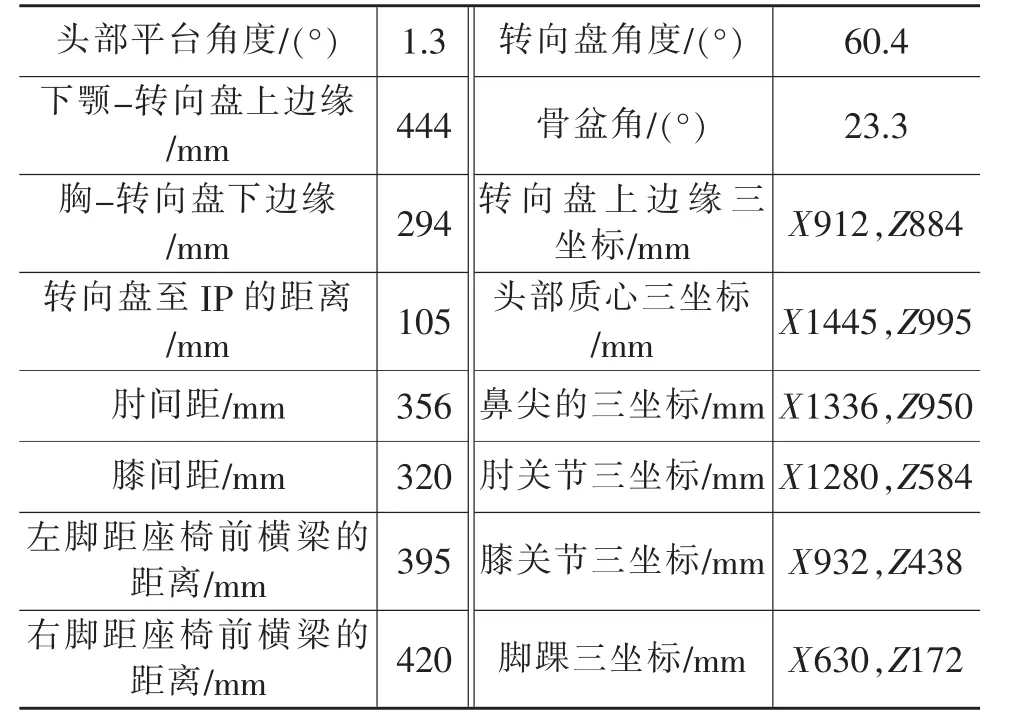
表1 假人定位參數(shù)
2.5 氣囊
氣囊在展開(kāi)過(guò)程中最容易出現(xiàn)程序崩潰,所以應(yīng)做到以下幾點(diǎn):
a.氣囊應(yīng)采用*AIRBAG_WANG_NEFSKE_JETTING模擬,因其具有氣體溫度、氣體質(zhì)量流、排氣孔面積等輸入項(xiàng),能夠較好地反映氣囊的試驗(yàn)性能。其中JETTING能夠定義氣流方向,且可有效展開(kāi)氣囊。*AIRBAG_WANG_NEFSKE_JETTING必須配以*AIRBAG_REFERENCE_GEOMETRY才能正常模擬氣囊展開(kāi)過(guò)程。
b.氣囊在未展開(kāi)前并沒(méi)有變形,所以必須設(shè)置*DEFORMABLE_TO_RIGID_AUTOMATIC中的D2R項(xiàng)將氣囊處理成剛體;達(dá)到氣囊點(diǎn)火時(shí)刻后,設(shè)置*DEFORMABLE_TO_RIGID_AUTOMATIC中的R2D項(xiàng)再將氣囊處理成變形體。
c.將氣囊自身接觸的摩擦因數(shù)以及氣囊與氣囊盒接觸的摩擦因數(shù)均設(shè)置為0。
2.6 安全帶
安全帶采用一維和二維單元混合建模,其中與假人接觸的部分采用二維單元,不接觸部分采用一維單元。因有的安全帶有預(yù)緊功能,因此肩帶的一維單元總長(zhǎng)度大于安全帶的預(yù)緊長(zhǎng)度,以避免二維單元滑入滑環(huán)時(shí)程序崩潰。
安全帶一維單元模型采用*MAT_SEATBELT關(guān)鍵字模擬,其中的LMIN(最小長(zhǎng)度)項(xiàng)需要設(shè)置,推薦值為單元長(zhǎng)度的1/10;LLCID (織帶的加載曲線)項(xiàng)和ULCID(織帶的卸載曲線)項(xiàng)需要從安全帶的拉伸試驗(yàn)中獲得。某安全帶織物剛度的加載和卸載的力-應(yīng)變曲線見(jiàn)圖5。
安全帶二維單元模型采用*MAT_ELASTIC或*MAT_FABRIC模擬,需要輸入彈性模量、密度和泊松比。
2.7 卷收器
采用*ELEMENT_SEATBELT_RETRACTOR模擬卷收器,并輸入力與位移關(guān)系的加載和卸載曲線,如圖6所示。其中,加載曲線的初始拉力應(yīng)大于零;卸載曲線的初始拉力應(yīng)等于零,且單調(diào)上升。
2.8 預(yù)緊器
采用*ELEMENT_SEATBELT_PRETENSIONER模擬預(yù)緊器,LS-DYNA提供了7種類(lèi)型的預(yù)緊器,每種類(lèi)型的預(yù)緊器都有不同的使用條件,應(yīng)按照已知條件選擇合適的預(yù)緊器。如某預(yù)緊器已知的限力值為1800 N,因此采用力—時(shí)間預(yù)緊器模擬預(yù)緊過(guò)程。
2.9 邊界條件
在臺(tái)車(chē)試驗(yàn)中,必須輸入整車(chē)碰撞試驗(yàn)中B柱下端的x向加速度曲線。某B柱下端的加速度曲線如圖7所示,采用*BOUNDARY_PRESCRIBED_MOTION將x向加速度曲線賦給剛體地板。
2.10 接觸
在臺(tái)車(chē)模型中需要定義以下接觸:假人自身接觸、假人與座椅接觸、假人與安全帶接觸、假人與IP接觸、假人與加速踏板和前圍的接觸、假人與氣囊接觸、氣囊與轉(zhuǎn)向盤(pán)與風(fēng)擋玻璃的接觸、氣囊自身接觸、結(jié)構(gòu)自身接觸、安全帶帶扣與座椅接觸、安全帶與座椅接觸等。接觸主要采用*AUTOMATIC_SURFACE_TO_SURFACE和*AUTOMATIC_SINGLE_SURFACE模擬,因?yàn)锳UTOMATIC接觸方式是從殼單元的兩邊進(jìn)行接觸檢測(cè),較適合各種復(fù)雜的接觸行為[3]。
對(duì)假人傷害值和姿態(tài)較敏感的接觸為假人手臂與儀表板、假人腳與加速踏板、假人腳與歇腳板、假人與座椅接觸等。表2為經(jīng)多次仿真后確定的各主要接觸的摩擦因數(shù)。

表2 各主要接觸的摩擦因數(shù)
3 仿真與試驗(yàn)結(jié)果對(duì)比分析
3.1 假人C-NCAP評(píng)分部位的曲線對(duì)比
圖8~圖16為仿真與試驗(yàn)的假人C-NCAP評(píng)分部位的曲線對(duì)比。其中,頭部合成加速度、髖部合成加速度及胸部傷害值的仿真值與試驗(yàn)值非常接近;頸部傷害值對(duì)比曲線的趨勢(shì)較一致,誤差較大,但遠(yuǎn)低于C-NCAP規(guī)定的高性能限值;大腿壓縮力累積對(duì)比曲線較接近;左膝蓋滑動(dòng)位移的仿真值為0.1 mm,試驗(yàn)值為0.2 mm;右膝蓋滑動(dòng)位移的仿真值為0.07 mm,試驗(yàn)值為0,絕對(duì)值較小,且遠(yuǎn)低于CNCAP的高性能限值6 mm;小腿壓縮力的對(duì)比曲線和TI值的對(duì)比曲線均較一致,其中,左小腿的誤差控制在15%內(nèi),相關(guān)性較好,右小腿由于受到油門(mén)踏板的影響而使其運(yùn)動(dòng)具有不確定性,即使相同的臺(tái)車(chē)試驗(yàn)誤差也會(huì)較大;安全帶力的對(duì)比曲線也較吻合。
表3為仿真與試驗(yàn)的假人C-NCAP得分對(duì)比結(jié)果。由表3可知,仿真值與試驗(yàn)值的誤差為2%,較真實(shí)地反映了試驗(yàn)狀態(tài)。

表3 仿真與試驗(yàn)的假人C-NCAP得分對(duì)比
3.2 假人的運(yùn)動(dòng)姿態(tài)對(duì)比
圖17為試驗(yàn)和仿真中假人在不同時(shí)刻的姿態(tài)對(duì)比。從圖17可看出,第56 ms時(shí)假人頭部開(kāi)始接觸氣囊;第76 ms時(shí)假人胸部加速度達(dá)到最大值;仿真假人與試驗(yàn)假人的運(yùn)動(dòng)姿態(tài)較一致。
4 結(jié)束語(yǔ)
以國(guó)產(chǎn)某車(chē)型的臺(tái)車(chē)試驗(yàn)為基礎(chǔ),在LS-DYNA環(huán)境中建立了臺(tái)車(chē)的有限元仿真模型,并以臺(tái)車(chē)試驗(yàn)中假人評(píng)分部位的曲線和假人的運(yùn)動(dòng)姿態(tài)為目標(biāo),重點(diǎn)對(duì)轉(zhuǎn)向管柱、氣囊、安全帶、預(yù)緊器、卷收器的建模關(guān)鍵技術(shù)以及接觸摩擦因數(shù)的設(shè)置進(jìn)行了研究。通過(guò)大量的臺(tái)車(chē)模擬試驗(yàn),假人C-NCAP評(píng)分部位的曲線誤差控制在15%內(nèi),假人C-NCAP得分誤差控制在2%內(nèi),證明了該臺(tái)車(chē)有限元仿真模型能夠真實(shí)有效地模擬臺(tái)車(chē)試驗(yàn)。
1 曲洪亮,李德才,錢(qián)國(guó)強(qiáng).基于MADYMO的乘員正面碰撞側(cè)約束系統(tǒng)模型的建立.東北林業(yè)大學(xué)學(xué)報(bào),2007,35(8):85~89.
2 王燦軍,管迪.基于臺(tái)車(chē)試驗(yàn)方法的某微型轎車(chē)乘員約束系統(tǒng)改進(jìn)設(shè)計(jì).汽車(chē)技術(shù),2009(11):38~41.
3 趙海歐.LS-DYNA動(dòng)力分析指南.北京:兵器工業(yè)出版社,2006.
猜你喜歡
艦船科學(xué)技術(shù)(2022年20期)2022-11-28 08:19:18
數(shù)學(xué)物理學(xué)報(bào)(2022年4期)2022-08-22 04:09:28
減速頂與調(diào)速技術(shù)(2020年4期)2020-11-22 07:20:26
上海節(jié)能(2020年3期)2020-04-13 13:16:16
石油化工建設(shè)(2019年6期)2020-01-16 08:03:42
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(shù)(2016年3期)2016-06-05 09:36:08
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18

- 汽車(chē)技術(shù)的其它文章
- 汽車(chē)傳動(dòng)領(lǐng)域行業(yè)盛會(huì)即將再次登陸上海——國(guó)際CTI第二屆中國(guó)論壇和展會(huì)“創(chuàng)新汽車(chē)變速器、混合動(dòng)力和電力驅(qū)動(dòng)技術(shù)”
- 低碳汽車(chē)關(guān)鍵技術(shù)與創(chuàng)新——2013中國(guó)(長(zhǎng)春)國(guó)際汽車(chē)技術(shù)論壇
- 協(xié)同研究開(kāi)發(fā) 共促產(chǎn)業(yè)升級(jí)——AUTOTEC2013
- 制動(dòng)主缸綜合性能測(cè)試系統(tǒng)設(shè)計(jì)*
- 重型汽車(chē)制動(dòng)摩擦片的正交試驗(yàn)與優(yōu)化設(shè)計(jì)*
- EGR對(duì)重型柴油機(jī)性能影響的試驗(yàn)研究