基于LLWin控制的慧魚創意組合模型實踐應用
2013-09-04 07:23:32段振華吳張永溫成卓王慶輝
實驗室研究與探索 2013年1期
段振華, 吳張永, 溫成卓, 吳 喜, 王慶輝
(昆明理工大學機電工程學院,云南昆明650093)
0 引言
隨著社會的發展,人們對大學生的動手能力、創新能力和綜合素質的要求越來越高。創新性人才的培養成為各教育工作者的艱巨任務與使命。自2000年以來國內許多高校陸續購置了慧魚創意組合模型,并開設了相關的實踐課程[1]。我校于2001年引進了慧魚教具模型,結合生產實際對學生開展創新性教育,培養學生的創新能力。
1 慧魚創意組合模型簡介
慧魚創意組合模型簡稱“慧魚”系在德國Arthur Fischer博士的專利“六面拼接體”基礎上發明的工程技術類智趣拼裝模型。自慧魚創意組合模型面世以來,由于其擴展性、啟發性強,覆蓋科學知識領域廣等特點,被廣泛應用于實驗教學、科研創新和生產實際等方面。世界知名的德國西門子、德國寶馬、美國IBM等一大批著名公司都采用慧魚模型來論證生產流水線。清華大學、上海交通大學為代表的一批高校建立的慧魚創新實驗室利用慧魚模型組合包系列建立了工程技術實驗室,開展創新教育和技術創新活動[2-4]。
慧魚創意組合模型通過各種各樣的構件(功能模塊)組合拼裝而成,主要構件采用優質尼龍塑膠制造,尺寸精確,不易磨損。連接方式采用燕尾槽插接方式,可以實現六面拼接、多次拆裝和反復使用。模型的構件主要分為 3 類[5-6]:
(1)機械構件。凸輪、彈簧、曲軸、萬向節、差速器、齒輪箱、鉸鏈、齒輪、連桿、鏈條、履帶、齒軸、齒條、渦輪及渦桿等。
(2)電器構件。發光器件、電磁氣閥、接口電路板、可調直線變壓器、直流電機、紅外線發射接線裝置、傳感器(光敏、熱敏、磁敏等)、接口電路板及PLC接口板等。
(3)氣動構件。儲氣罐、汽缸、活塞、氣彎頭、手動氣閥、電磁氣閥、氣管等。
2 慧魚模型的控制方式
慧魚模型的控制方式通過電腦(PC)接口板或可編程控制器(PLC)接口進行程序控制[7]。
采用PLC控制時,PLC控制接口板直接與PLC相連,采用梯形圖進行編程[8]。PLC控制方式廣泛應用于現代工業的控制領域中,但PLC的體系結構是封閉的,各PLC廠家的硬件體系兼容性差,編程語言及指令系統也各異,當用戶選擇了PLC產品后,必須選擇與其相應的控制規程,并且需要學習特定的編程語言。
采用電腦控制時,通過RS232串口與電腦連接,電腦接口板自帶微處理器,編輯好的控制程序可直接寫入微處理器,控制模型動作[9]。電腦控制不僅能實現PLC的控制功能,并且具有更強的數據處理能力、強大的網絡通訊功能以及能夠執行比較復雜的控制算法和其近乎無限制的存儲容量等優勢。應用電腦接口板對慧魚模型進行控制時,可以采用慧魚公司的LLWin軟件或高級語言C、C++、VB等進行編程控制[10]。但由于高級語言的命令眾多,程序復雜且不易記憶等語言本身存在的復雜性因素,使初學者不容易掌握,使用者在編程過程中容易出現錯誤。而LLWin編程軟件以其直觀的圖形化編程語言,易于操作等特點被廣泛應用于實驗教學和工程實踐方面。本文通過電腦接口板,采用LLWin編程軟件對慧魚模型進行控制和應用研究。
3 LLWin 編程軟件簡介[11-12]
LLWin編程軟件是慧魚公司推出的圖形化、模塊化編程軟件,與智能接口配套使用,語言簡潔、直觀、易懂,能夠實現對模型的實時控制。它采用圖形化編程語言,運用形象、直觀的圖標來表示運行的程序。用戶界面清晰簡潔,主界面如圖1所示。其中,工作區是編制控制程序的場所;菜單欄里包含著軟件的各類操作命令;工具條中存放著常用的重要操作命令,包括初始化、開始/停止、連線等;工具箱里包含了編制控制程序時的功能模塊,其中共有18個功能模塊,編程時只需用鼠標按住所需的模塊將其拖入工作區,并做相應設置,按控制要求將各個模塊連接好,就可以實現對模型各種復雜運動的控制。
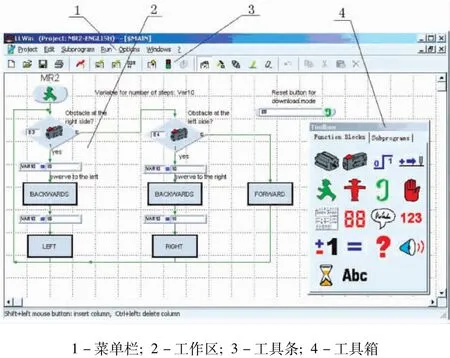
圖1 用戶界面截圖
運用該軟件編制控制程序方便快捷,無需手工輸入大量的代碼,極大地縮短了程序的編制和調試周期,有利于設計人員各種設計意圖的快速實現和各種設計思想的對比優化。
4 自動物流分揀輸送線模型應用實例
4.1 自動物流分揀輸送線的工藝流程[13-14]
自動物流分揀輸送線屬于現代化機械系統,其工藝流程主要包括:①系統自動檢測工件的屬性將其分類分離;②根據預設的程序將分離后的物料送入相應的提升裝置;③通過末端物料轉移裝置將其送入相應的存放位置。
4.2 自動物流分揀輸送線的結構設計
根據自動物流分揀輸送線的工藝流程可以將其結構分為以下3部分:
(1)分離裝置。通過磁性裝置分離磁性和非磁性物質,并分配到不同的輸送路線上。
(2)提升/下降裝置。將物料輸送到不同的空間實現立體分揀。
(3)推動輸送裝置。將分離輸送到位的物理推送到倉庫中。
慧魚創意組合模型組裝的事物模型如圖2所示。
4.3 控制系統設計
4.3.1 控制任務

圖2 自動物流分揀輸送線慧魚模型
首先通過磁電式傳感器區分磁性和非磁性物料,將非磁性物料送入存儲位置1,磁性物料通過升降裝置1送入2層分揀線。物料到達第2層分揀轉盤,再次通過磁電傳感器進行分揀,將分揀出的非磁性物料送入存儲位置2,磁性物料經轉臺旋轉90°將物料送入升降裝置2,升降機2將物料送入指定位置后由推送裝置將物料送入存儲位置3,完成動作。
根據自動物流分揀輸送線控制任務完成控制流程框圖,如圖3所示。
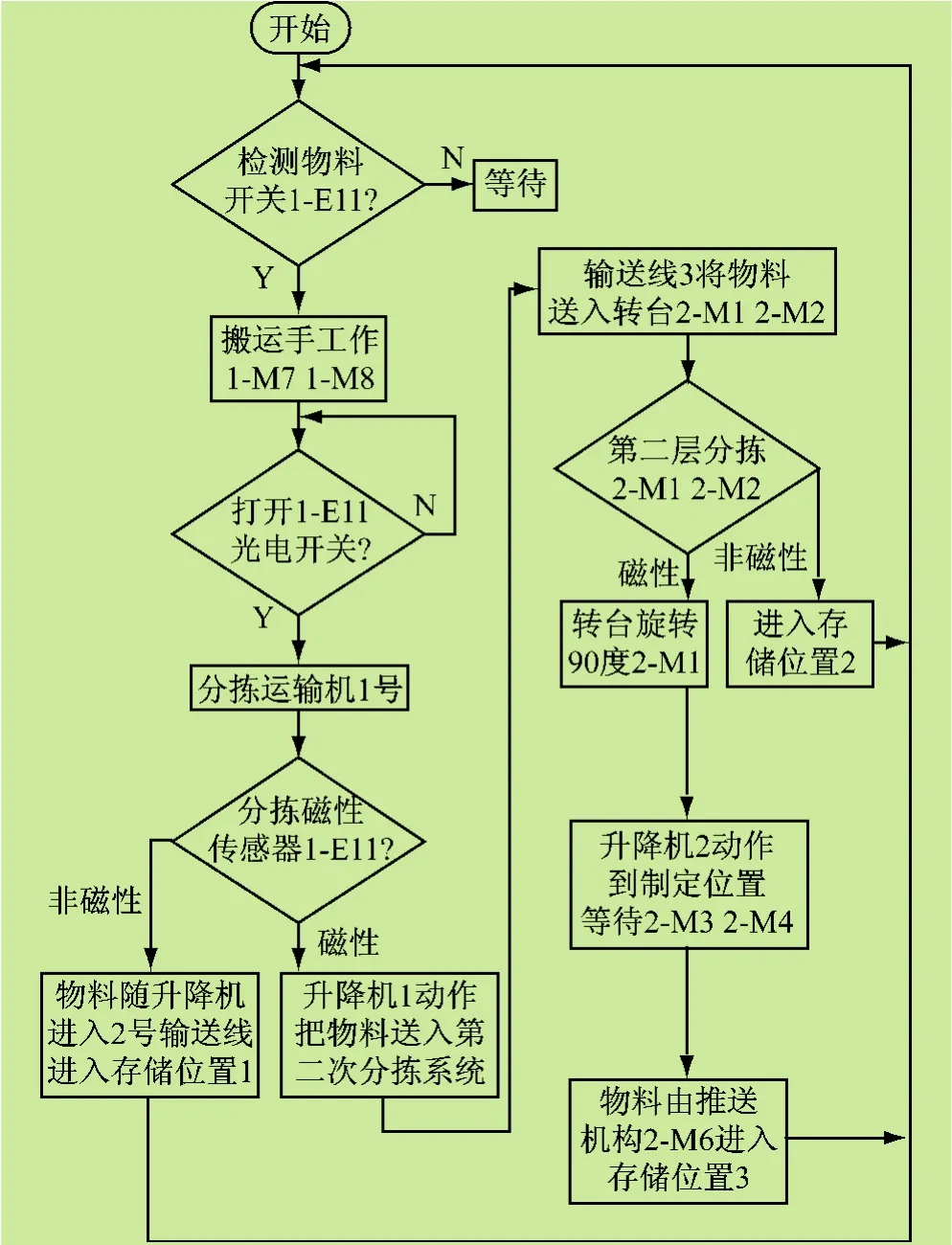
圖3 控制流程圖
4.3.2 控制系統硬件設計[15-16]
用1臺微型計算機作為系統的控制計算機,參數檢測部分采用慧魚自帶的光電開關、行程開關和磁電式傳感器。輸出驅動部分采用直流伺服電動機。連接部分采用慧魚智能接口板作為I/O通道,慧魚智能接口板集成了4路輸出接口,可以連接電動機、電磁鐵或燈等。還有8路輸入接口,可以連接開關、光敏、電敏、磁敏傳感器等。板上自帶微處理器,通過串口就可以與計算機連接,在計算機上編好了程序可以移植到接口板的微處理器上,對模型進行控制。
4.3.3 控制系統軟件設計
使用LLWin軟件編寫控制程序。根據系統的控制流程框圖,明確各個部件的動作順序和動作時間,在編輯窗口中插入所需要的功能控制模塊。按邏輯關系連好各個模塊間的連線,在需要賦值的模塊中填入所需的參數。LLWin主程序控制流程圖如圖4所示。
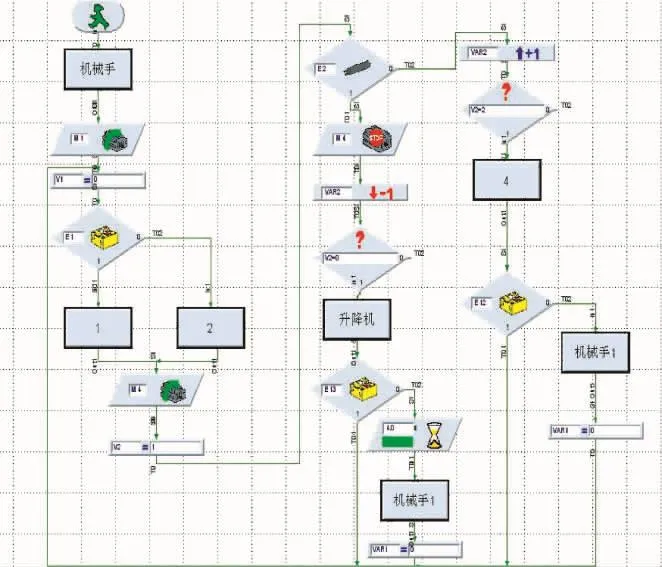
圖4 主程序圖
5 結語
自動物流分揀輸送線系統模型能夠完成設計工藝過程。系統能夠按著控制要求中的運動順序,運動時間準確運行,但系統運行中的啟停位置與控制要求略有偏差,這是由于受到模型本身的行程開關和光電開關精度的影響。在實際應用中可以根據使用要求選擇較高精度的傳感器,即可改善精度方面的不足。
實踐證明采用模塊化編程語言LLWin控制的慧魚模型不僅可以用于實驗教學,培養學生的創新能力。還可以應用在工程實踐中模擬現代機械系統,對現實工程問題進行模擬驗證,可以縮減設計周期,優化控制系統,節約工程成本。
[1] 唐東煒,安 軍,肖周勇.基于LabVIEW的慧魚機器人控制系統設計[J].中國現代教育裝備,2008(11):50-51.
[2] 華 蕊,唐東煒,譚偉潦.基于VB對慧魚模型遠程控制的實現[J].現代制造工程,2004(6):72-74.
[3] 楊松濤,張 新.慧魚模型在機電類創新型人才培養中的應用[J].科技信息,2010(20):24-26.
[4] 蔡 理,郭魯家.慧魚模型在本科教學中的多層次應用[J].實驗室研究與探索,2004,23(7):81-83.
[5] 朱志松,徐海黎,朱龍彪.機電專業創新實踐項目的設計與實現[J].實驗室研究與探索,2009,28(9):8-10.
[6] 劉曉敘,劉 康,符純華.運用fischertechnik(慧魚)創意模型培養學生創新能力的研究[C]//全國機械設計教學研討會議,2004.
[7] 萬書亭,韓 蕾.基于PLC控制的柔性制造系統的研究[J].河北軟件職業技術學院學報,2007,9(4):67-70.
[8] 陳 晟,張海軍.應用PLC實現對慧魚機器人的控制[J].農業技術裝備,2008(2):59-60.
[9] 曹紅英,鄧 娜.基于慧魚模型的無碰撞避障機器人研究[J].儀器儀表用戶,2009,16(2):7-9.
[10] 王大龍.柔性加工生產線的計算機控制的快速仿真研究[J].機械研究與應用,2005,18(3):102-103.
[11] 戴 娟.基于LLWin模塊化語言與嵌入式設計的機器人控制系統設計[J].微計算機信息,2006,22(1-2):212-214.
[12] 漆向軍,陳 霖.基于 LLWin3.0控制Fischertechnik模型實例[J].農業化研究,2004(4):194-196.
[13] 王 松,王培俊,李 聰.基于Web的物流自動化分揀系統虛擬實時定制設計[J].物流技術,2010(9):124-125.
[14] 洪 超,徐清華,樓冬梅.VIPA 300S系列PLC在煙草物流自動分揀系統中的應用[J].自動化應用,2010(4):1-2.
[15] 季永欣.現代機械系統的構成及其控制方法研究——在組合模型上的應用[D].昆明:昆明理工大學,2005.
[16] 季永欣,何邦貴,彭軍祥.雙工作臺柔性制造系統模型的計算機控制及實現[J].昆明理工大學學報(理工版),2005,30(3):38-41.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
物流技術與應用(2020年11期)2020-03-11 03:11:36
汽車觀察(2018年12期)2018-12-26 01:05:44
消費導刊(2018年8期)2018-05-25 13:20:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年2期)2015-02-28 18:45:09
商界(2014年12期)2014-04-29 00:44:03
