非接觸障礙檢測技術在清篩機污土帶避障中的應用
2013-09-05 05:09:06胡傳亮高春雷王發燈周佳亮
鐵道建筑 2013年3期
胡傳亮,高春雷,王發燈,周佳亮
(1.北京大型養路機械運用檢修段,北京 100071;2.中國鐵道科學研究院鐵道建筑研究所,北京 100081)
道砟清篩機是用來清篩道砟的大型養路機械,將臟污的道砟從枕底挖出,篩分后,將清潔道砟回填至道床,通過污土輸送裝置將篩出的污土清除到線路外。
清篩機作業時,經常發生碰倒接觸網支柱的事故,各鐵路局也自行開發了多種安全保障裝置,但是由于穩定性低和智能化程度不高,沒有得到推廣使用,現場主要還是依靠人眼觀察,存在重大安全隱患。為解決清篩機作業時避讓污土帶的問題,迫切需要一套可靠的清篩機污土帶避障系統。本文介紹了研發的自動避讓接觸網支柱的避障系統。
1 清篩機污土輸送裝置避障系統
1.1 避障系統的要求
避障系統應實現雙重非接觸測量,①精度保證,采用激光和超聲波兩種非接觸檢測技術,激光測量可以保證精度,超聲波能穿透灰塵和小顆粒物,保證了測量可靠性;②響應速度快,如果系統檢測到障礙物,將會在300ms內做出判斷;③可靠性高,采用嵌入式系統軟硬件,保證系統的高性能、高可靠性和高穩定性;④能實現自動避讓的智能化要求。
1.2 傳感器件的選擇
激光傳感器單色性好,方向性強,電子線路和半導體可集成化,可晝夜工作,測距精度高。超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠,超聲波檢測往往比較迅速、方便、計算簡單、易于做到實時控制,并且在測量精度方面能達到工業實用的要求。
避障系統采用激光和超聲波兩種非接觸式傳感器檢測障礙物的位置。激光測距傳感器掃描角度可達180°,角度分辨率為0.25°,距離分辨率為10mm,測量精度為±60mm,最大掃描距離為30m。超聲波傳感器的掃描角度為10°,距離分辨率為10mm,最大探測范圍為8 m。
通過測量污土帶轉角,計算污土帶最遠端位置,判斷污土帶位置。考慮到現有清篩機的安裝方便,本系統研發了以絕對編碼器為基礎的污土帶轉角測量結構,如圖1所示,從動輪和絕對編碼器通過聯軸器連接在一起。
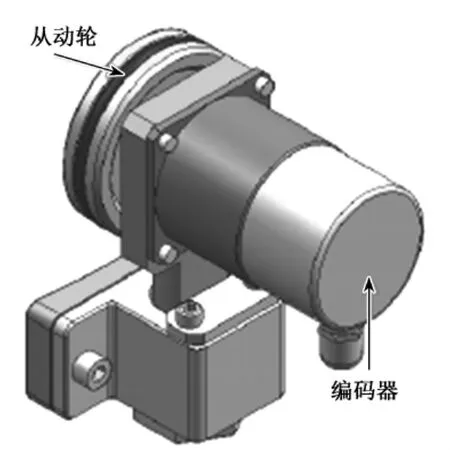
圖1 污土帶位置檢測傳感器
1.3 核心控制器件的選擇
考慮避障系統的成本及使用要求,選用了嵌入式微處理器 DSPIC30F6012、嵌入式操作系統 Windows XP Embedded,嵌入式系統是一種“完全嵌入到受控器件內部,為特定應用而設計的專用計算機系統”。專用的嵌入式系統能保證系統的高性能、高可靠性和高穩定性。
1.4 硬件系統構成
硬件系統如圖2所示,本系統采用激光掃描技術和超聲波探測技術對障礙物進行非接觸式檢測;采用自主研發的傳感器對污土帶作業的最遠端位置進行檢測;采用高性能的處理器件對數據進行處理和分析,采用監控圖像輔助系統避障。
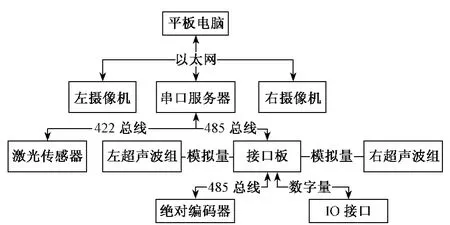
圖2 硬件系統框圖
1.5 傳感器件的布置
傳感器布置主要包括一個sick激光傳感器總成、兩個超聲波傳感器總成、兩個攝像機總成和一個轉角測量裝置。激光傳感器總成安裝于清篩機左側車頭大燈上部,兩個超聲波總成和攝像機總成分別安裝于清篩機左側和右側大燈上部,轉角測量結構安裝于右側拋污帶旋轉基座上。共6個超聲波傳感器圓形分布,每兩個間的夾角為8°,當輸送裝置向前進方向的左側輸送污土時,左側傳感器1~3進行循環檢測,當輸送裝置向前進方向的右側輸送污土時,傳感器4~6循環檢測;由于每個超聲波傳感器的中心角為10°,每組單獨工作時,覆蓋區域為26°范圍,在該區域內的障礙均有多次被檢測到的機會,所以不容易漏測。清篩機左側傳感器的具體安裝位置如圖3。

圖3 傳感器的布置
2 系統工作原理
避障系統需要檢測的項目有障礙物和污土帶位置。
對于障礙物檢測,為更好地保證障礙檢測的可靠性,采用激光傳感器與超聲波傳感器組同時檢測,根據兩種檢測方式對障礙物信息進行智能判定,由上位機控制系統對障礙物的位置數據進行處理,通過回轉機構收回污土輸送帶最終實現避障,避免輸送帶碰倒接觸網支柱,從而提高清篩機作業時的安全性。兩種檢測系統各有優缺點,激光檢測精度高范圍廣,但是易受灰塵的影響,適用于在灰塵較小的情況下使用。超聲波檢測可以不受灰塵的影響,可以全天候工作。本系統為了提高人機交互性,增加了攝像機監視系統,可以根據數字圖像上的等距線直觀判斷障礙物的位置。
對于污土帶位置的檢測,本系統采用間接檢測方法,通過檢測污土帶的轉角,計算污土帶最遠端的位置。清篩機的整個污土帶可以視為一個剛體,污土帶上的每一點在相同的時間內相對于污土帶的旋轉中心轉過的角度相同。污土帶的轉角測量目的就是測量污土帶上某一點的轉角。轉角測量結構的安裝位置如圖4所示,設從動輪的半徑為r,接觸點到污土帶旋轉中心半徑為R,絕對編碼器輸出的角度為φ,則污土帶接觸點的轉角為
金枝君的“非自由戀愛”,是以為男女間的特殊關系,只有自由滿足性欲的一件事情;至于戀愛應該是人與人普通的關系。并且他那篇文章里“滿足性欲”等字樣,原文本都做“交門”,是我代他改了的。所以金枝的主張實在和存統一樣,“廢婚后男女完全自由交門”,本不能說他渾樸。祖基君對于金枝君底論文,稍有誤解;但他解釋自由戀愛的意義,我認為很有研究的價值。

式中,φ0為污土帶位于線路中心位置時絕對編碼器輸出的角度;θ即為污土帶的轉角,順時針為正。
根據圖5可得最遠端(xb,yb)坐標的計算公式為

式中,γ=atan(2L/d),L為污土帶長度,d為污土帶寬度,S為污土帶旋轉中心到端板的距離。

圖4 污土帶安裝位置

圖5 污土帶最遠端
3 避障算法
本系統的避障原理包括四個步驟。
1)計算污土帶最遠端坐標(xb,yb)
絕對編碼器檢測到污土帶的轉角θ,根據公式(2)可得最遠端(xb,yb)的位置。
2)計算物體危險點坐標(xz,yz)
假設超聲波檢測到的物體距超聲波安裝位置的距離為R_CHAO,則物體的位置應該在超聲波的掃描角φ范圍內,即在中心角為φ、半徑為R_CHAO的圓弧上。根據超聲波的安裝角度,可以計算出圓弧上兩個端點的坐標(x1,y1)和(x2,y2),則超聲波傳感器檢測的危險點坐標為
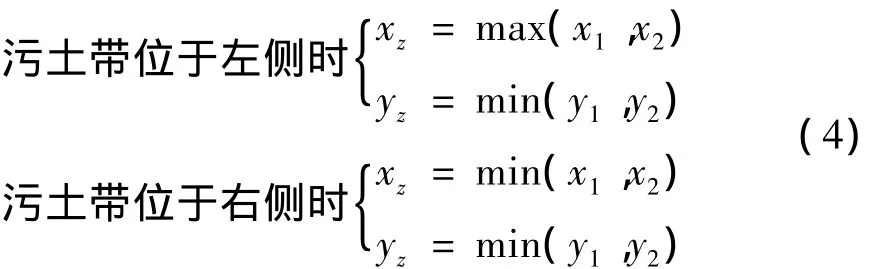
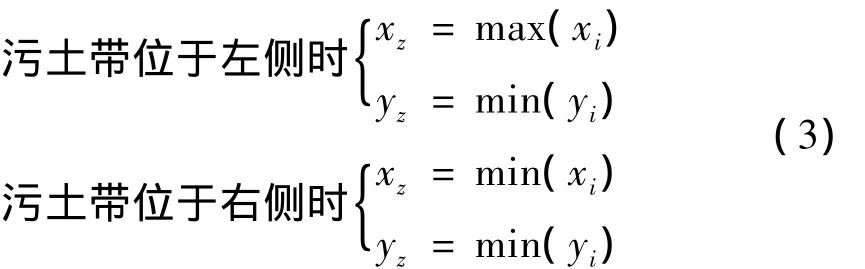
3)危險區域劃分
當污土帶在左側時,危險區域為

當污土帶在右側時,危險區域為

其中D和L為安全距離參數,D與檢測精度有關,L與清篩機行車速度有關。危險區域見圖6。
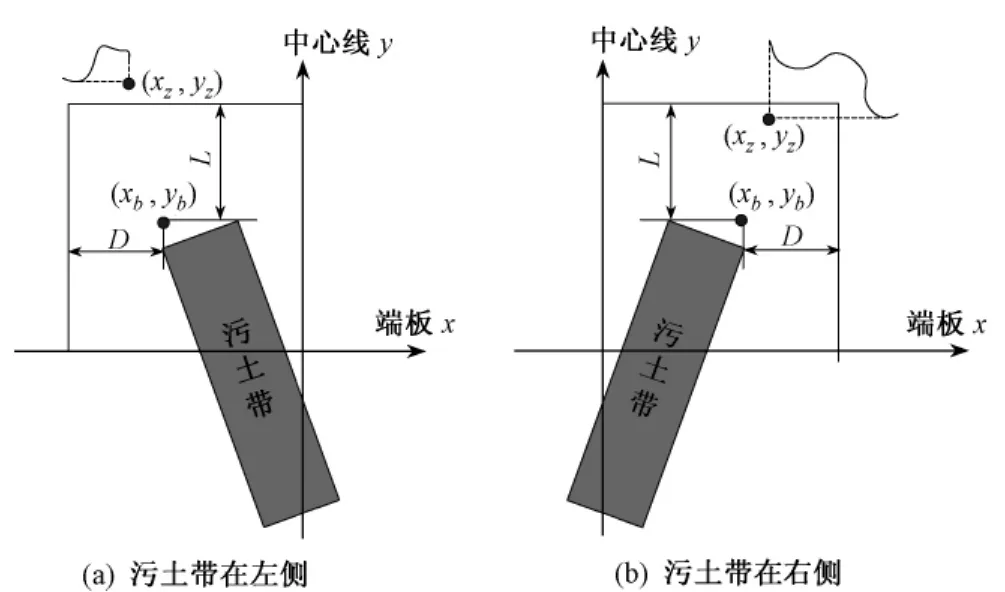
圖6 危險區域
4)障礙判斷
當物體危險點(xz,yz)進入了危險區域則構成障礙,給出聲光報警信號,當物體危險點(xz,yz)不在此區域內則視為安全。
4 系統軟件設計
系統軟件采用C語言進行開發,采用模塊化設計,分為單片機模塊和計算機模塊兩部分。單片機程序如圖7所示。
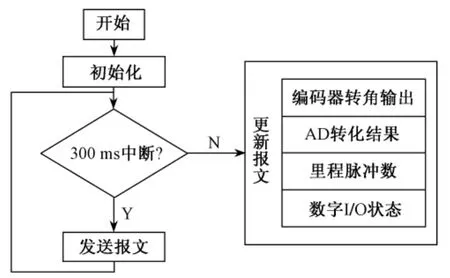
圖7 單片機程序
單片機負責模擬量的采集、數字I/O處理、里程脈沖計數和絕對編碼器(RS485接口)數據的接收,最后將處理結果打包傳輸給計算機。單片機采集的模擬量為超聲波的輸出,數字量輸入包括清零信號、關機信號、車體前進信號、車體后退信號,數字量輸出包括聲光報警信號、停車信號、啟動激光傳感器信號、啟動超聲波傳感器信號。
計算機軟件在嵌入式操作系統平臺上運行,采用VC語言進行編制。系統具體的軟件框圖如圖8所示。在主程序中開啟三個線程,圖像采集線程采集網絡攝像機的數字圖像,并將采集結果保存到全局內存中。
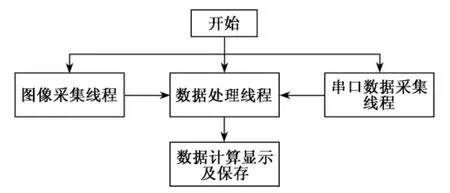
圖8 計算機軟件
串口處理線程由硬件自動觸發,將接收到的串口數據自動保存到全局變量數組里,數據處理線程則由串口處理線程發送消息控制,接收一幀串口數據后,調用全局內存中數字圖像數據,并對相關數據進行計算、顯示和保存。
5 結束語
本系統采用了激光和超聲波兩種非接觸式檢測技術對障礙物進行檢測;采用了數字圖像監控技術,輔助清篩機駕駛員避障,提高了系統的交互性;采用了自主研發的污土帶轉角傳感器,實現對現有清篩機污土帶的測量;采用了可靠的避障算法,保障清篩機作業的安全,提高避障系統預警能力;采用了高性能處理器,適應車體振動環境;采用嵌入式系統,提高了系統的速度和穩定性。
清篩機污土帶避障系統從檢測技術、避障算法到系統硬件和軟件都是經過精心調研和技術論證的。本系統可以在白天、黑夜、風、雨、雪、漫天塵土等惡劣環境下使用,具有較高的可靠性。此系統解決了清篩機污土帶安全生產避障問題,能產生良好的社會和經濟效益。
[1]寇長青,宋慧京.全斷面枕底清篩機[M].北京:中國鐵道出版社,1998.
[2]趙珂.高精度超聲波測距儀的研制[J].傳感器技術,2003,22(2):55-57.
[3]高春雷,王發燈.清篩機污土輸送裝置避障系統的設計[J].鐵道建筑,2007(8):97-99.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
