錐形凸輪式無級變速器設計與仿真
2013-09-07 08:52:04張晉西楊新軍郭學琴
中國機械工程 2013年2期
張晉西 楊新軍 郭學琴
重慶理工大學,重慶,400054
0 引言
機械式無級變速器具有結構簡單、可靠性高、無級調速方便等諸多優點,目前應用較多的有行星式、帶式、鏈式和脈動式等[1]。近年來機械式無級變速器得到了廣泛的關注和深入的研究[2-3],但是在結構上鮮有大的創新和突破。本文提出一種機械式無級變速器新型結構,采用均勻布置的三個錐形凸輪機構及單向超越離合器,可獲得無級變速,且輸出速度均勻,運動性能良好。通過SolidWorks2010建立三維模型,采用內核為ADAMS的仿真模塊Motion進行運動與動力仿真模擬,獲得了良好的效果。
1 總體構成與工作原理
本文設計的無級變速器總體結構如圖1所示。其工作原理為:輸入軸通過齒輪均勻地將運動分解到三個凸輪上,凸輪帶動擺桿,每個擺桿經單向超越離合器帶動輸出軸轉動。擺桿在錐形凸輪上軸向滑動,改變最大擺角,實現無級變速。具體實現過程為:輸入軸6與主動齒輪7固連,帶動三個從動齒輪5,從動齒輪5通過三根凸輪軸4帶動三個相位差為120°的均勻布置的凸輪3轉動,擺桿2與輸出軸1之間采用單向超越離合器8連接,利用超越離合器從動件速度可以超越主動件速度運動的特性,將三個擺桿2的往復擺動轉換為從動輸出軸1的連續單向轉動。
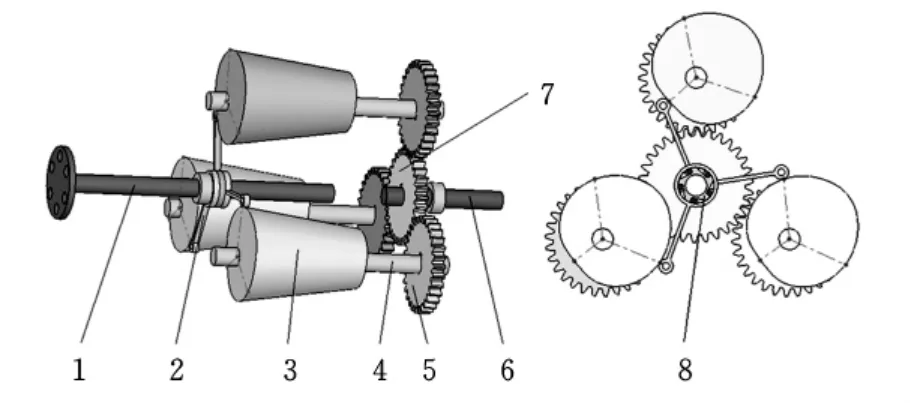
圖1 總體結構
2 輸出軸勻速轉動的實現過程
目前各種機械式無級變速器的缺陷之一是輸出運動不能實現勻速運動。本設計采用具有組合運動規律的擺動從動件——凸輪機構,以及單向超越離合器來實現完全的勻速運動。
2.1 擺桿等速運動的實現過程
為了將凸輪的勻速轉動轉化為擺桿的勻速轉動,擺桿的運動規律采用等速運動與正弦加速度組合運動規律,如圖2所示。這樣的組合既可獲得需要的勻速轉動,又可避免等速運動在起始與結束時加速度過大[4]。下面具體計算推程時擺桿的理論角速度。
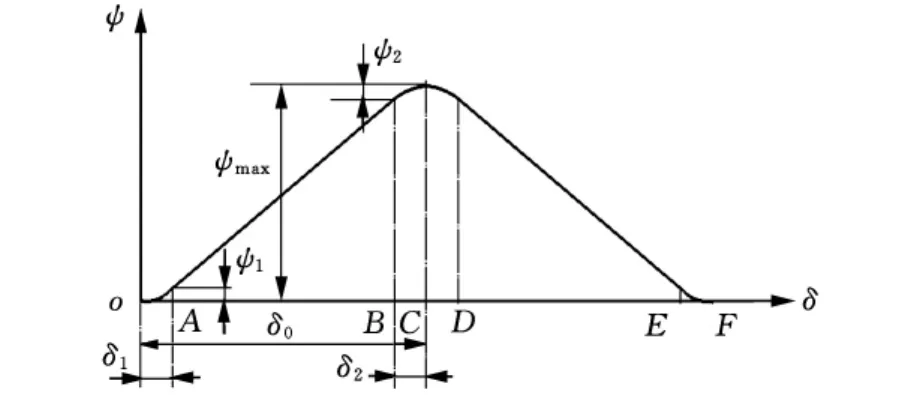
圖2 擺桿運動規律
OA段為正弦加速度加速區段,其擺桿角位移為

AB段為等速運動區段,其擺桿角位移為

BC段為正弦加速度減速區段,其擺桿角位移為

根據組合運動原則,要保證兩段運動規律在銜接點上的運動參數連續,令δ=δ1時,式(1)和式(2)對時間求導后的速度相等,可得

推程時,令擺桿最大角位移ψmax=25°,凸輪推程運動角δ0=180°,正弦加速度加速區段與減速區段凸輪轉角相等,δ1=δ2=20°,由式(1)~式(5)可求出推程時凸輪擺桿角位移ψ。回程運動規律與推程對稱一致。可見,三個擺桿相差120°相位布置,每個擺桿做等速運動區間最大值為140°,共420°,在轉動一周(360°)的范圍內,可提供足夠的等速運動輸出。
2.2 單向超越離合器
本設計為了將擺桿的往復擺動轉變為單向轉動,在每個擺桿與輸出軸之間,采用了單向超越離合器連接。單向超越離合器廣泛應用于飛機、汽車、摩托車、機床等裝置與設備,其仿真模型如圖3所示,一款某廠生產的實物如圖4所示。
單向超越離合器工作原理為:當輸入軸帶動凸輪轉動時,凸輪使得擺桿1逆時針旋轉,滾子2滾動到楔形空間的小端,楔緊在擺桿1與內圈3之間,離合器進入接合狀態,使得作為主動件的擺桿1、內圈3、從動件輸出軸4一起逆時針旋轉。當擺桿1順時針旋轉,滾子2滾動到楔形空間的大端,離合器處于分離狀態,輸出軸4不隨擺桿1順時針轉動。如果輸出軸4獲得逆時針且轉速大于相同方向轉動的擺桿1的轉速,離合器也將處于分離狀態,即從動件輸出軸4可以超越主動件轉動,不能帶動主動件回轉。
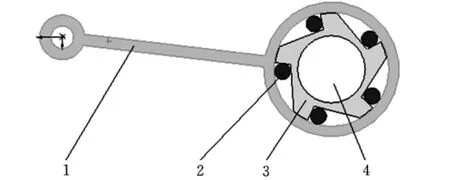
圖3 單向超越離合器仿真模型

圖4 單向超越離合器
3 無級變速的實現過程
無級變速是利用錐型凸輪實現的,錐型凸輪如圖5所示。由式(1)~式(5)獲得擺桿角位移ψ后,凸輪的理論廓線和實際廓線坐標可按照文獻[4]求出。通過SolidWorks2010,用樣條曲線繪制組合運動規律的凸輪廓線,這里設定擺桿最大行程角分別為ψmax=25°和ψmax=8°,得到兩個凸輪輪廓曲線,兩輪廓距離為凸輪長度,然后用軟件對兩輪廓進行放樣特征處理,得到各橫截面均相似的三維錐形凸輪。
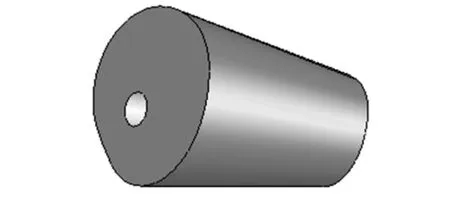
圖5 錐型凸輪
如圖1所示,當輸入軸轉速不變,需要輸出軸獲得無級變速時,擺桿2沿凸輪軸線移動,輸出軸與單向離合器采用花鍵連接,在彈簧的作用下,擺桿與錐型凸輪的不同部位接觸,從而改變擺桿的最大行程角ψmax,調節輸出軸的角速度。當凸輪轉速一定,擺桿位于錐型凸輪的大端時,相同時間內擺桿行程角大,擺桿轉速就快,傳遞到輸出軸上的轉速就快;相反,當擺桿位于錐型凸輪的小端時,擺桿轉速小,輸出軸上的轉速也相應較小。由于大端到小端逐漸收縮,從而可以實現無級變速。
4 運動與動力仿真
本文通過SolidWorks2010自帶的模塊Motion進行運動與動力仿真模擬[5]。
4.1 運動仿真
SolidWorks建立的3D模型可無縫轉換為仿真實體模型,仿真的大部分約束由裝配時的配合自動轉換而成,采用插值數據方式模擬輸入軸啟動—平穩運行—停止運轉過程,平穩運行時角速度為ω=180°/s,如圖6所示。橫坐標為仿真時間,縱坐標為輸入軸角速度。
進行仿真運算后,三個擺桿的轉動角速度隨時間的變化規律如圖7~圖9所示,三個擺桿最大角速度略有差別,屬于正常的仿真誤差。正負號表示擺桿擺動方向不同。
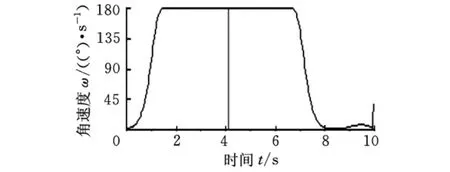
圖6 輸入軸轉速
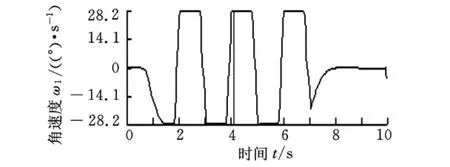
圖7 擺桿1轉速
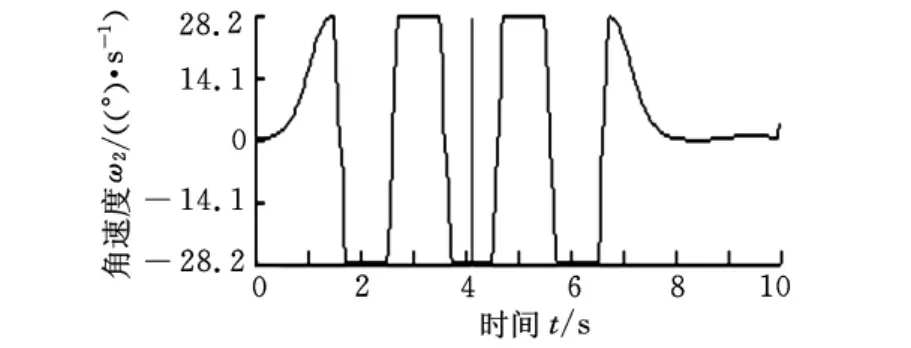
圖8 擺桿2轉速
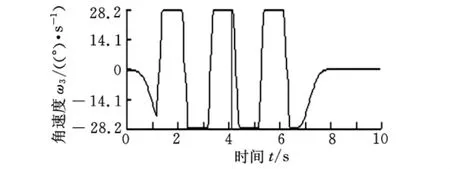
圖9 擺桿3轉速
仿真獲得三個擺桿的角速度分別為ω1、ω2、ω3,模擬單向超越離合器將這三種運動合成到輸出軸,只輸出其角速度的正值,過濾掉反方向轉動產生的角速度負值,采用以下的仿真函數實現:
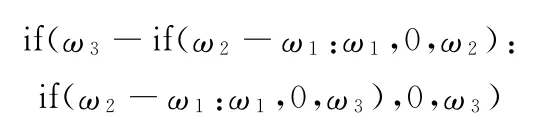
仿真獲得輸出軸角速度ω=28.4°/s,如圖10所示。這里利用了超越離合器從動件速度可以超越主動件速度的運動特性,在三個擺桿的往復擺動作用下,從動輸出軸以最大速度連續單向轉動。
當擺桿位于錐型凸輪的小端時,情況類似,三個擺桿在彈簧作用下與凸輪同時保持接觸,由于最大行程角減小,其轉速降低,輸出軸角速度ω=9.1°/s,仿真結果如圖11所示。可見,輸入軸轉速不變,通過軸向移動擺桿位置,輸出軸的轉速大幅減小,而且為無波動的勻速輸出。

圖10 輸出軸轉速
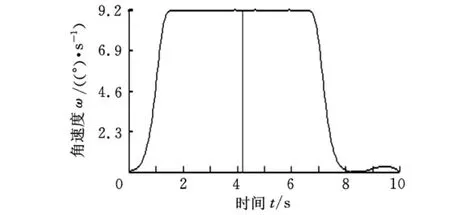
圖11 輸出軸轉速
4.2 動力仿真
凸輪機構運轉時的振動和沖擊會影響到機構的運轉平穩性能,是凸輪機構設計需要考慮的問題。本文采用了等速運動與正弦加速度組合運動,從理論上來說,等速運動加速度為零,但是運動開始和結束時具有較大沖擊,正弦加速度最小加速度也為零,且無沖擊,通常將這兩種規律加以組合[4],在獲得等速運動的同時,可避免出現過大的加速度及由此產生的附加動載荷。Solid-Works2010模塊Motion具有動力仿真能力,對輸出軸的角加速度仿真結果如圖12所示,由圖可見,在運動轉換的開始和結束部分,雖然存在一定的加速度變化,但其值較小[6],而且,這些變化也有仿真模型裝配誤差帶來的影響。此外,本設計采用的單向超越離合器,其楔形結構特點,也可以使得在傳遞運動時降低振動和沖擊。
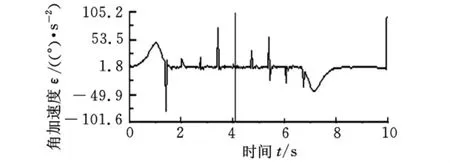
圖12 輸出軸角加速度
5 運動性能分析
無級變速器的變速性能是決定其應用廣泛程度的重要因素,本設計在這方面具有令人滿意的效果。
(1)由圖6、圖10、圖11可知,輸入軸角速度也即凸輪角速度ω=180°/s。在軸向移動擺桿位置方面,當擺桿位于凸輪小端面時,擺桿行程角ψmax=8°,輸出軸的平均角速度ωm=9.1°/s,最大速比imax=ω/ωm=19.78。當擺桿位于凸輪大端面時,擺桿行程角ψmax=25°,輸出軸的平均角速度ωm=28.4°/s,最小速比imin=6.34。而一般金屬帶式無級變速器傳動比只能達到2.61[7],可見本設計速比值較大,效果良好。
(2)無級變速器另一個技術指標為變速比Rb,即輸出軸的轉速最大值與最小值之比,對本無級變速器來說,是擺桿位于凸輪大端面與小端時的輸出軸轉速之比,Rb=28.4(°/s)/9.1(°/s)=3.12,金屬帶式無級變速器的變速比一般為5.5~6,本設計值偏小,但是,可以通過改變凸輪結構尺寸來增大變速比,比如,增大凸輪錐度,或保持錐度不變,增加凸輪長度,使得凸輪擺桿在大端和小端的擺動角度差加大,從而提高變速比。
(3)本設計由于采用了凸輪等速運動規律,輸出軸的速度在理論上是完全均勻的。一般脈動式的機械變速器由于采用了多相位非勻速機構,不可避免地存在速度波動[8],可見本設計在運動平穩性方面具有優勢。
6 結論
(1)采用空間錐形凸輪機構,通過擺桿在凸輪軸線方向的移動,實現無級調速,變速效果良好,為無級變速器的設計提供了新的思路。
(2)本文利用凸輪等速運動規律,將三個對稱布置的擺桿運動經單向超越離合器,獲得完全的勻速輸出,相對脈動、鏈式等機械變速器具有更優良的運動性能。
[1]阮忠唐.機械無級變速器設計與選用指南[M].北京:化學工業出版社,1999.
[2]李丹,黃興元.脈動式無級變速器傳動研究及發展概況[J].機械設計與制造,2006(9):167-169.Li Dan,Huang Xingyuan.Research on Transmission of Impulse Stepless Speed Variator and Overview of Development[J].Machinery Design & Manufacture,2006(9):167-169.
[3]杜力,黃茂林,李太福.脈動式無級變速器真實運動規律的研究[J].中國機械工程,2004,15(12):1080-1084.Du Li,Huang Maolin,Li Taifu.Study on the Real Motion Law of Impulse Variable Speed Device[J].China Mechanical Engineering,2004,15(12):1080-1084.
[4]孫桓,陳作模,葛文杰.機械原理[M].北京:高等教育出版社,2010.
[5]張晉西,郭學琴.SolidWorks及COSMOSMotion機械仿真設計[M].北京:清華大學出版社,2007.
[6]曾克儉,李光.凸輪機構動力學分析[J].輕工機械,2003(3):47-49.Zeng Kejian,Li Guang.Dynamical Analysis of the CAM Mechanism[J].Light Industry Machinery,2003(3):47-49.
[7]張偉華,謝里陽,程乃士.金屬帶式無級變速器摩擦因數和傳動效率的實驗研究[J].機械設計,2006,23(12):41-43.Zhang Weihua,Xie Liyang,Cheng Naishi.Experimental Research on Friction Factors and Transmission Efficiency of Metal Belt Typed Step-less Speed Variator[J].Journal of Machine Design,2006,23(12):41-43.
[8]杜力,李琳.脈動式機械無級變速器結構參數的設計[J].渝州大學學報,2003,19(1):21-24.Du Li,Li Lin.Design on Mechanism Dimensional Parameters of Impulse Stepless Speed Regulators[J].Joural of Yuzhou University(Natural Sciences Edition),2003,19(1):21-24.
