基于經(jīng)驗?zāi)B(tài)分解的載貨汽車載荷動態(tài)檢測策略研究
2013-09-09 07:15:34田晶晶李世武楊志發(fā)汪海正
振動與沖擊 2013年4期
田晶晶,李世武,蘇 建,楊志發(fā),陳 璐,汪海正
(吉林大學(xué) 交通學(xué)院,長春 130022)
車輛的裝載狀態(tài)對其操縱穩(wěn)定性有重要的影響,車輛行駛過程中裝載狀態(tài)實時動態(tài)監(jiān)測預(yù)警可有效預(yù)防由異常車輛裝載狀態(tài)誘發(fā)的道路交通事故的發(fā)生。目前,車輛裝載狀態(tài)分析測量方法大都是離線分析,對載荷動態(tài)檢測的方法研究較少。Niedzwiecki[1]研究自適應(yīng)濾波法在車輛動態(tài)稱重的應(yīng)用。郭蘭英等[2-3]研究了應(yīng)變式軸重秤,它們主要應(yīng)用于車輛載重量的檢測站稱重檢查。陳廣華等[4]設(shè)計了基于粘貼式應(yīng)變傳感器的車輛超載監(jiān)測系統(tǒng),但該系統(tǒng)中車輛載荷檢測傳感器結(jié)構(gòu)復(fù)雜、成本高,因此實用性較差。
根據(jù)汽車理論的相關(guān)背景知識,懸架是整車懸掛質(zhì)量的承載構(gòu)件,其最主要的功能是傳遞作用在輪胎和車架之間的力和力矩,緩和路面不平度對車輛的沖擊并衰減由此引起的車輛振動。首先本文仿真分析了鋼板彈簧懸架的動態(tài)力學(xué)特性。基于車輛載荷與懸架鋼板彈簧變形量的關(guān)系分析結(jié)果,設(shè)計了一種高精度帶過載保護的汽車載荷動態(tài)檢測裝置[5],并構(gòu)建了車輛載荷檢測動態(tài)系統(tǒng)試驗平臺。
1 懸架動力學(xué)特性仿真分析
1.1 路面不平度模型
路面不平度是車輛行駛過程中最主要的激勵源之一。根據(jù)長春汽車研究所制訂的《車輛振動輸入—路面不平度表示方法》(GB/T7031-1986)將路面不平度將路面分為A~H級[6]。目前我國路面以B級路面為主,本文以B等級路面不平度激勵作為車輛振動模型的輸入激勵。參考文獻[7],建立路面不平度隨機激勵信號生成的數(shù)學(xué)模型,如式(1)所示:

式中:n00為下截止空間頻率,n00=0.011m-1;n0為參考空間頻率,n0=0.1m-1;Gq(n0)為路面不平度系數(shù),m3;W(t)為均值為零的高斯白噪聲;q(t)為路面隨機高程位移,m。
1.2 二自由度懸架動力學(xué)模型
本文以解放賽龍ⅡCA1169PK2L2EA80載貨汽車為試驗車。根據(jù)其結(jié)構(gòu)特性選用二自由度四參數(shù)1/4車輛懸架動力學(xué)模型,懸架的簡化結(jié)構(gòu)如圖1。
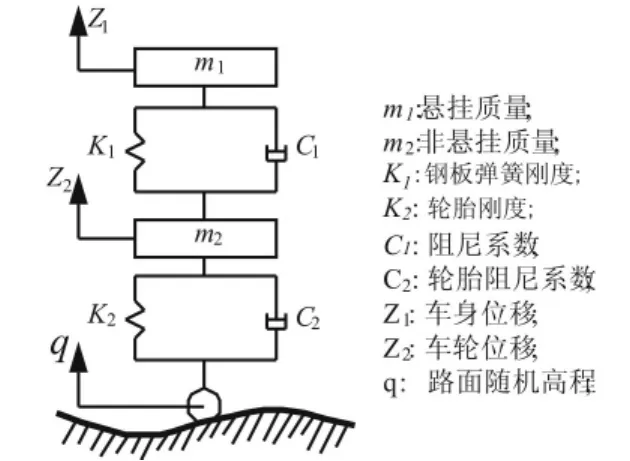
圖1 1/4車輛懸架結(jié)構(gòu)模型Fig.1 Structure model of suspension of a quarter vehicle
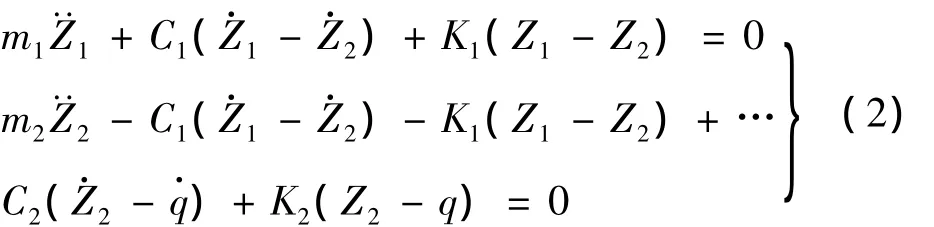
車輛懸架動力學(xué)微分方程如式(2)所示:
式(2)的狀態(tài)向量為式(3):

輸入向量為:

輸出向量為:

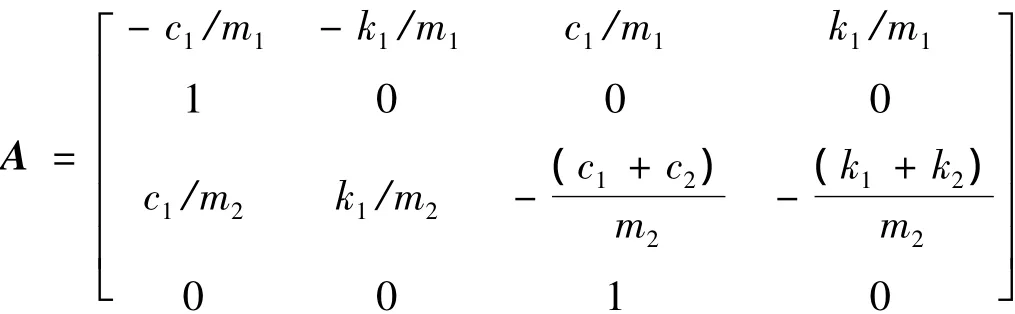
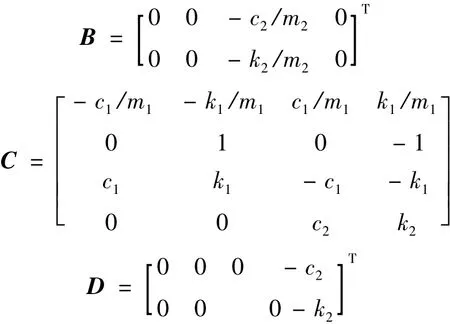
將式(3)~(5)代入式(2)得式(6):

式(6)系數(shù)矩陣A、B、C、D分別為:
1.3 仿真分析
根據(jù)選定的試驗車型,車輛懸架建模參數(shù)如表1所示。

表1 車輛建模參數(shù)Tab.1 Parameters of vehicle modeling
在Matlab/Simulink環(huán)境中[8]建立車輛懸架動力學(xué)仿真模型,對車輛在B等級路面、車速30 km/h和60 km/h、半載狀態(tài)下懸架的動態(tài)特性進行仿真分析。根據(jù)圖2不同車速下懸架的動態(tài)載荷可得車速為30 km/h時動態(tài)載荷幅值為靜態(tài)載荷的10%,而且隨著車速增加到60 km/h時懸架的動態(tài)載荷明顯增大[9]。
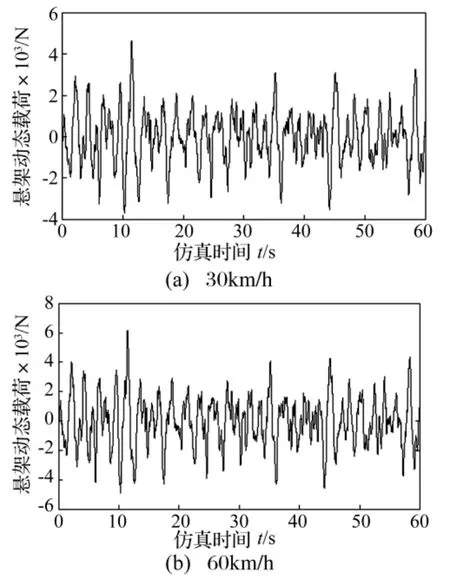
圖2 不同車速下的動態(tài)載荷Fig.2 Dynamic suspension load under different speeds
以車輛在30 km/h車速、半載狀態(tài)運行為例,懸架位移和懸架載荷在路面不平度激勵q輸入下的幅頻域特性曲線,曲線均具有2個峰值,表明該信號為兩個不同頻率的信號疊加求得,如圖3所示。
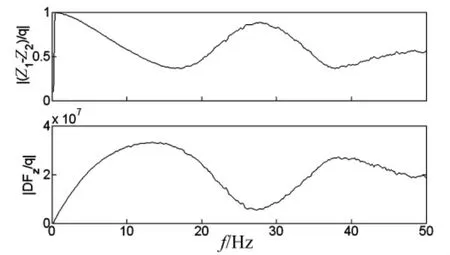
圖3 懸架變形量和載荷的幅頻特性Fig.3 Magnitude-frequency characteristics of suspension deformation and load
2 車輛載荷動態(tài)檢測裝置
2.1 車輛載荷與鋼板彈簧位移量關(guān)系
對于特定的鋼板彈簧,其剛度系數(shù)、彎曲跨距和板簧厚度都是固定值,車輛載荷m和鋼板彈簧形變量關(guān)系[4]如式(7)和式(8):

其中:α為鋼板彈簧相關(guān)系數(shù);Δε為鋼板彈簧表面應(yīng)變;l為鋼板彈簧跨距,mm;k為鋼板彈簧剛度,N/mm;h為鋼板彈簧厚度,mm。通過式(7)和(8)推導(dǎo)出車輛載荷與鋼板彈簧應(yīng)變之間存在線性關(guān)系。本文通過4.2節(jié)系統(tǒng)靜態(tài)標定試驗獲取車輛載荷與鋼板彈簧變形量之間的映射關(guān)系式(24)證明了車輛載荷與鋼板彈簧變形量之間的線性關(guān)系。
2.2 車輛載荷動態(tài)檢測裝置
基于車輛載荷與鋼板彈簧變形量之間的線性關(guān)系,本文設(shè)計了一種高精帶過載保護的汽車載荷動態(tài)檢測裝置,其整體結(jié)構(gòu)如圖4(a)所示,由1車體連接板、2拉線式位移傳感器、4和5組成的過載保護機構(gòu)總成、3、15和16組成的過載保護機構(gòu)鎖緊裝置和18鋼板彈簧連接板組成[5]。本文設(shè)計開發(fā)的懸架載荷動態(tài)檢測裝置的工作原理如下:拉線式位移傳感器2的拉線通過過載保護機構(gòu)總成的滑輪4由螺栓3固結(jié)于車體連接板1,車體連接板1與車架相連;過載保護機構(gòu)總成通過鎖緊裝置固結(jié)于鋼板彈簧連接板18,鋼板彈簧連接板估計與鋼板彈簧。圖4(b)為過載保護機構(gòu)總成拆解圖,主要由滑輪4、導(dǎo)軌12、滑道13和過載保護彈簧9組成。導(dǎo)軌12和滑道13為套裝且具有間隙配合的圓柱形管道,滑道13具有卡銷調(diào)整孔14,過載保護彈簧9套裝與導(dǎo)軌12的圓柱形管道內(nèi),過載保護彈簧9及導(dǎo)軌12的一端通過螺栓6、7和8固結(jié)于滑輪4,另一端通過卡銷調(diào)整孔15的卡銷螺栓11調(diào)整過載保護彈簧9的預(yù)緊力。滑輪4用于將拉線式位移傳感器2輸出電壓信號加倍,提高傳感器測量的精度。
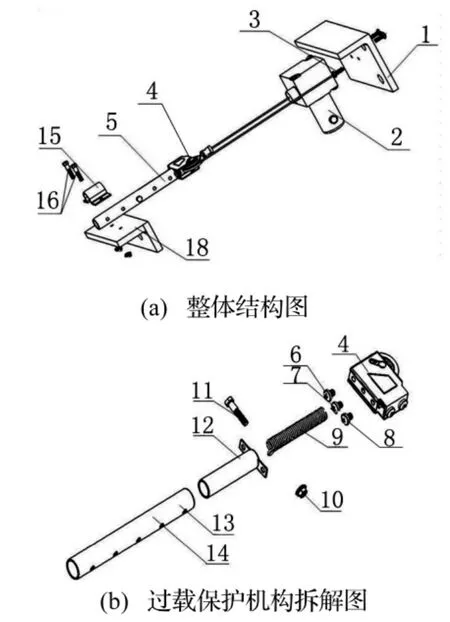
圖4 載荷動態(tài)檢測裝置Fig.4 Dymamic detection device for vehicle load
3 基于EMD數(shù)據(jù)處理算法
3.1 EMD在汽車載荷檢測中的應(yīng)用
EMD是一種基于信號局部特征的分解方法,它將信號分解為若干個本征模態(tài)函數(shù)(IMFs)和一個殘余量,其中IMFs反映了信號的動態(tài)特性,殘余量反映了信號的趨勢或均值。汽車行駛過程中,汽車本身的因素如發(fā)動機轉(zhuǎn)動、輪胎與地面摩擦、汽車與路面耦合、路面不平整等因素引起車輛振動而形成動態(tài)載荷,車輛行駛過程中載荷狀態(tài)由靜態(tài)載荷和動態(tài)載荷組成。通過數(shù)字濾波不能有效分離靜態(tài)載荷與動態(tài)載荷[10]。本文將汽車靜態(tài)軸重看作信號的殘余量,動態(tài)載荷看作信號中的本征模態(tài)函數(shù),通過經(jīng)驗?zāi)B(tài)分解的方法從載荷信號中分離出動態(tài)載荷,得到汽車的靜態(tài)載荷。
3.2 EMD載荷信號處理算法
EMD方法基于以下假設(shè):任何復(fù)雜的信號都是由若干個本征模態(tài)函數(shù)和殘余量組成的,每個本征模態(tài)函數(shù)可以是線性的和平穩(wěn)的或非線性的和非平穩(wěn)的[11-12]。EMD方法采用“篩”選的方法從原始信號中將本征模態(tài)函數(shù)分離出來。本文采用EMD處理位移傳感器輸出電信號的具體步驟如下:
① 找出位移傳感器輸出原始電信號x(t)的局部極大值點emax(t)和局部極小值點emin(t),分別將局部極大值點和極小值進行三次樣條插值得到信號的上包絡(luò)線mmax(t)和下包絡(luò)線mmin(t)。求出mmax(t)和mmin(t)的均值,求得到原始信號的均值包絡(luò)線m(t):

將位移傳感器輸出原始電信號x(t)與均值包絡(luò)線m(t)相減,得到第一個分量h1(t)。即:

② 檢查h1(t)是否符合IMF定義的EMD終止條件(見3.3.1節(jié))。如果h1(t)不能同時滿足IMF定義的EMD終止條件,則令x(t)=h1(t),轉(zhuǎn)步驟1,得到h2(t),即:

這樣經(jīng)過k次“篩”選得:

直到hk(t)同時滿足IMF定義EMD終止條件,此時得到第一階IMF分量c1(t),即:

③ 將位移傳感器輸出原始電信號x(t)減去第一階IMF分量可得到剩余量r1(t),即:

令新信號x(t)=r1(t),重復(fù)步驟①和②,得到第二階IMF分量c2(t),再令:

這樣繼續(xù)分解,直至第n階分量rn(t)小于預(yù)先設(shè)定的值或rn(t)己經(jīng)成為單調(diào)函數(shù)時分解結(jié)束。這樣位移傳感器輸出原始電信號x(t)可以表示成n個IMF分量和一個平均趨勢分量rn(t)的和,即:

④ EMD分解正交性檢查:具有正交性的信號分解方法可以將噪聲信息互不干擾地、獨立地提取出來。在數(shù)學(xué)上,如果函數(shù)y1(t)和y2(t)滿足:

將式(16)寫成式(17):

即把平均趨勢分量rn(t)看作第n+1個分量cn+1(t)。然后對信號x(t)做平方得:

EMD正交性定義到任意兩個本征模態(tài)函數(shù)ci(t)和ck(t)上,其正交性表示為:

3.3 EMD載荷信號處理算法中幾個關(guān)鍵問題
3.3.1 EMD 及其“篩”過程終止條件
EMD將原始信號分解為若干個本征模態(tài)函數(shù)和一個殘余量。本文利用EMD方法對位移傳感器輸出電壓信號進行實時分解,基于實時性的要求設(shè)定EMD終止條件為:① 位移傳感器輸出電信號x(t)的極大值點emax(t)和極小值點emin(t)個數(shù)之和小于3;② IMF的個數(shù)小于5;

3.3.2 EMD 端點效應(yīng)抑制
針對EMD法端點效應(yīng)問題,采用鏡像延拓法抑制位移傳感器輸出原始信號EMD端點效應(yīng),并以左延拓信號開始先出現(xiàn)極大值點后出現(xiàn)極小值點為例對鏡像延拓法進行分析[2],其它情況依似類推。設(shè)位移傳感器輸出原始電信號時間序列及其對應(yīng)的信號序列分別為:

其采樣步長為1,x(t)有M個極大值和N個極小值,對應(yīng)的序列下標(Im,In)、時間序列為(Tm,Tn),傳感器信號值為(U,V):
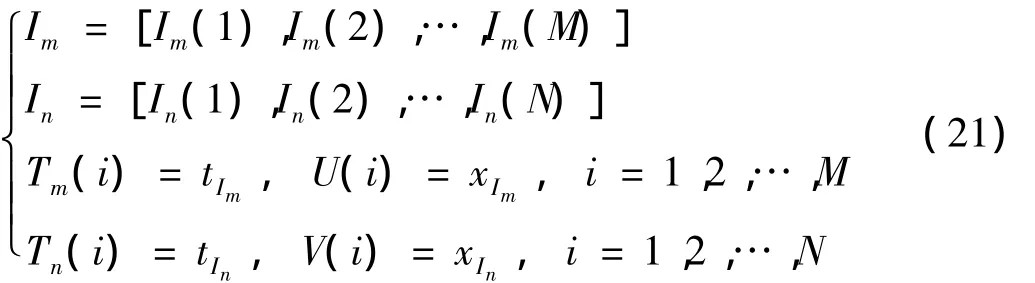
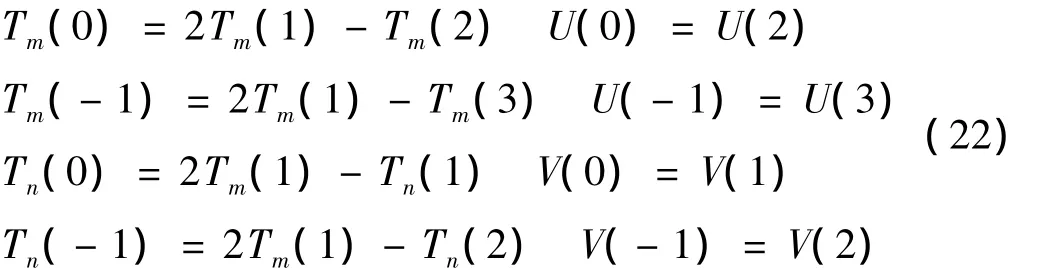
信號開始先出現(xiàn)極大值點后出現(xiàn)極小值點,即Im(1)<In(1)時,將信號端點的鏡像延拓分為以下兩種情況:
(1)如果左端點的數(shù)值比第一個極小值點In(1)的值大,即x(1)>V(1),則以極大值點Im(1)作為對稱中心向左延拓,得到兩個極值的位置(Tm,Tn)和數(shù)值(U,V)為:
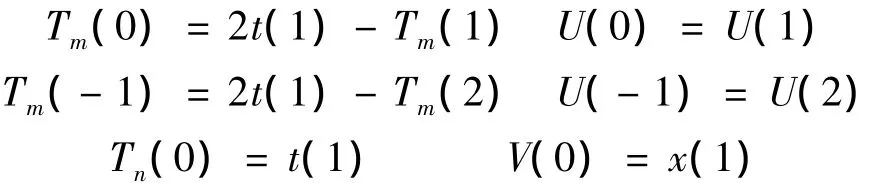
(2)如果左端點的數(shù)值小于或等于第一個極小值In(1),即x(1)≤V(1)。此時將左端點定義為第一個極小值點,以左端點為對稱中心向左延拓,得到兩個極值的位置(Tm,Tn)和數(shù)值(U,V)為:

4 車輛載荷動態(tài)檢測試驗
4.1 載荷動態(tài)檢測系統(tǒng)構(gòu)建
本文以解放賽龍Ⅱ載貨汽車為試驗車、懸架載荷動態(tài)檢測裝置、Freescale的MC9S12XEP100單片機為車載終端構(gòu)建車輛載荷動態(tài)檢測系統(tǒng)試驗平臺[14],分別如圖5中1、2和3所示。

圖5 車輛載荷動態(tài)檢測試驗平臺Fig.5 Platform for dynamic detection of vehicle load
車載終端以10 Hz的采樣頻率獲取懸架載荷檢測裝置中位移傳感器輸出電信號。基于傳感器輸出電信號的EMD處理算法,車載終端采集、處理、計算車輛載荷狀態(tài)信息的流程如圖6所示。
4.2 載荷動態(tài)檢測裝置標定試驗
本文通過車輛載荷動態(tài)檢測裝置靜態(tài)標定試驗獲取懸架載荷與鋼板彈簧變形量的關(guān)系。系統(tǒng)靜態(tài)標定試驗在一汽農(nóng)安汽車試驗加載場區(qū)進行,試驗過程如圖5中4所示,試驗車以500 kg載重間隔添加砝碼,裝卸兩次分別利用CAS稱重儀(見圖5中1的標記處)測量四組輪胎的垂直載荷,車載終端(見圖5中3)采集對應(yīng)載荷下的四組位移傳感器的輸出電壓值。砝碼的總加載量為15 T,超過車輛的額定載荷50%。通過系統(tǒng)靜態(tài)標定試驗獲取四組懸架載荷與對應(yīng)的位移傳感器的輸出電信號之間的對應(yīng)關(guān)系,分別如式(24)所示:
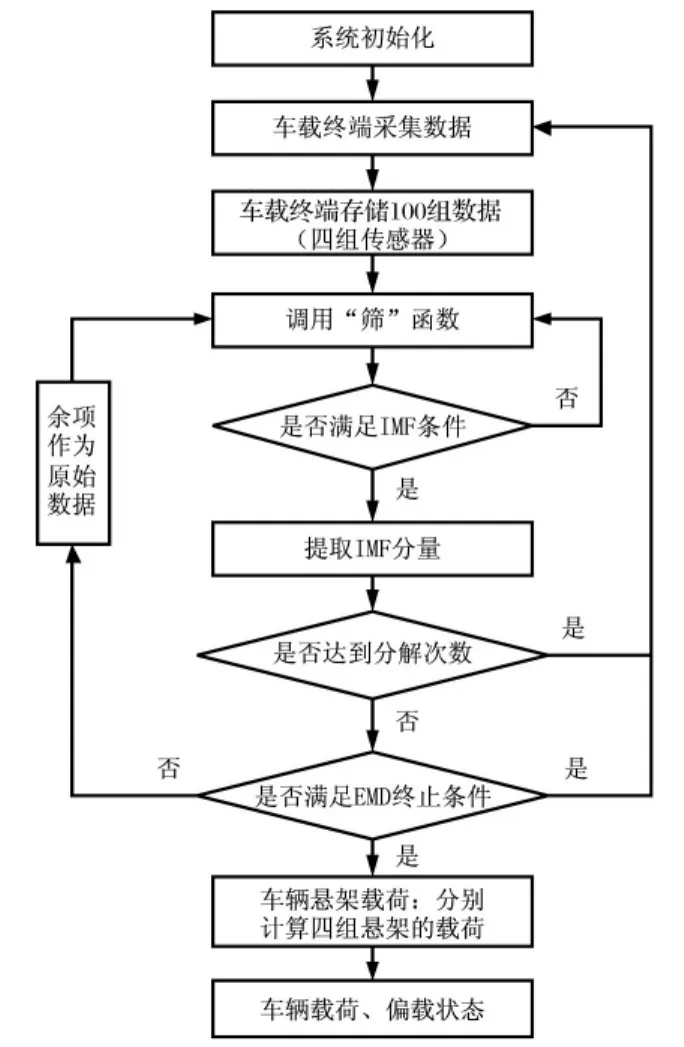
圖6 車載終端工作流程Fig.6 Workflow of vehicle
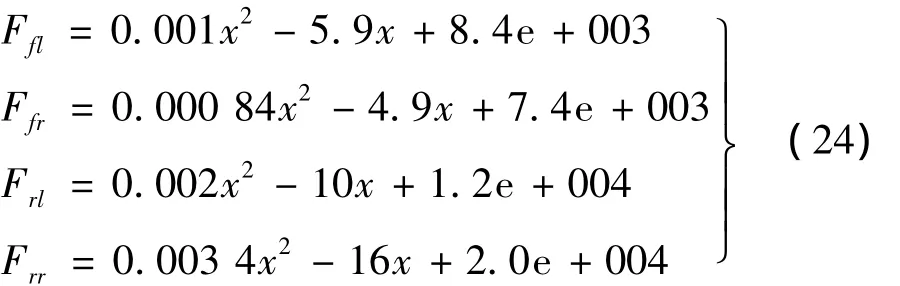
其中:Ffl,F(xiàn)fr,F(xiàn)rl,F(xiàn)rr為車輛左前、左后、后左和后右側(cè)車輛載荷與鋼板彈簧變形量的對應(yīng)關(guān)系。
4.3 車輛載荷動態(tài)檢測試驗
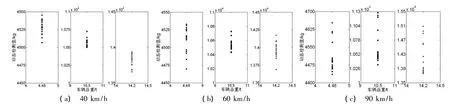
圖7 40、60和90 km/h時,不同裝載量時載荷檢測Fig.7 Dynamic detection of vehicle load status under different loading with 40、60 和 90 km/h
為驗證系統(tǒng)在車輛行駛過程中對車輛載荷的動態(tài)測量結(jié)果的準確性,本文在一汽農(nóng)安汽車試驗場性能路進行了車輛載荷動態(tài)檢測試驗,在40,60和90 km/h車速下、對車輛裝載量為空載、半載和滿載時進行動態(tài)檢測。圖7(a)和(b)為車輛載荷檢測裝置在車速為40和60 km/h車速和空載、半載和滿載的裝載量下對其載質(zhì)量動態(tài)檢測值的波動狀態(tài),車輛裝載量為半載時,系統(tǒng)檢測誤差最大,系統(tǒng)檢測誤差均小于5.0%。圖7(c)為車輛載荷檢測裝置在車速為90 km/h車速和空載、半載和滿載的裝載量下對其載質(zhì)量動態(tài)檢測值的波動狀態(tài),車輛滿載時檢測誤差分別為 3.12%,7.616%和6.75%。由此可見,該裝置隨著車速增大檢測誤差增大。
5 結(jié)論
針對載貨汽車載荷動態(tài)檢測問題,首先通過二自由度1/4車輛振動模型仿真分析了懸架的動態(tài)特性;然后基于仿真分析得懸架載荷與變形量的對應(yīng)關(guān)系,設(shè)計開發(fā)了一種高精度帶過載保護的載荷檢測裝置,并采用EMD法構(gòu)建了車輛載荷檢測裝置輸出信號數(shù)據(jù)處理模型;最后以解放賽龍Ⅱ重型載貨汽車為試驗車、MC9S12XEP100單片機為車載終端設(shè)計開發(fā)了車輛載荷狀態(tài)動態(tài)檢測試驗平臺。在一汽農(nóng)安汽車試驗場進行了系統(tǒng)靜態(tài)標定試驗,得出懸架載荷與變形量的映射關(guān)系方程,車輛分別在空載、半載和滿載狀態(tài)下,以40、60和90 km/h車速行駛進行載荷動態(tài)檢測試驗,試驗結(jié)果表明該方法可以準確檢測對車輛40和60 km/h車速行駛時載荷進行動態(tài)檢測,檢測誤差不超過5%;車輛行駛車速為90 km/h,空載、半載和滿載狀態(tài)下,系統(tǒng)檢測誤差分別為3.12%,7.616%和6.75%。該系統(tǒng)滿足實際的需要,可以為物聯(lián)網(wǎng)中車輛載荷實時遠程監(jiān)測提供技術(shù)支持。
[1]Niedzwiecki M,Wasilewski A.Application of adaptive filtering to dynamic weighing of vehicles[J].Control Engineering Practice,1996 ,4(5):635-644.
[2]郭蘭英.汽車動態(tài)稱重系統(tǒng)算法研究[D].西安:長安大學(xué),2010.06.
[3]Zhou Z F,Cai P,Chen R X.Empirical mode decomposition in weigh-in-motion of vehicles[J].Proceedings of the international conference on sensing,computing and automation,2006,Part4:1788-1791.
[4]陳廣華,鞠 娜,楊 飛,等.基于粘貼式應(yīng)變傳感器的車輛超載監(jiān)測系統(tǒng)[J].北京航空航天大學(xué)學(xué)報,2011,37(4):409-414.
CHEN Guang-hua,JU Na,YANG Fei,et al. Monitoring system for vehicle overloading base on paste-type strain sensor[J].Journal of Beijing university of Aeronautics and Astronautics,2011,37(4):409-414.
[5]蘇 建.一種高精度帶過載保護的汽車超偏載檢測裝置[P].中國,發(fā)明專利,專利號:CN102173286A.
[6]陳杰平,陳無畏,祝 輝,等.基于Matlab/Simulink的隨機路面建模與不平度仿真[J].農(nóng)業(yè)機械學(xué)報,2010,41(3):11-15.
CHEN Jie-ping,CHEN Wu-wei,Zhu Hui,et al.Modeling and simulation on stochastic road surface irregularity based on matlab/Simulink[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(3):11-15.
[7]王直民,張土喬,吳小剛.不平整路面上的車輛等效動載系數(shù)[J].浙江大學(xué)學(xué)報 (工學(xué)版),2007,41(6):1007-1011.
WANG Zhi-min, ZHANG Tu-qiao, WU Xiao-gang.Equivalentvehicle dynamic load coefficienton rough pavement[J].Journal of Zhejiang University(Engineering Science),2007,41(6):1007-1011.
[8]李國勇.智能控制及其MATLAB實現(xiàn)[M].北京:電子工業(yè)出版社,2005.
[9]周志峰.應(yīng)變式汽車軸重動態(tài)測量系統(tǒng)性能增長研究[D].上海:上海交通大學(xué)電子信息與電氣工程學(xué)院,2007.11.
[10] Zhou,Z F,Cai P.Estimating the axle load of vehicle in motion based on nonlinear curve-fitting [J].IET Science,Measurement& Technology,2007,1(4):185-190.
[11] Norden E,Huang M L,Wu C,et al.A confidence limit for the empiricalmode decomposition and Hilbertspectral analysis[J].Proceedings of the royal society of london series a-mathematical physical and engineering sciences,2003,2037(459):2317-2345.
[12] www.ens-lyon.fr/~ flandrin/software.html.
[13] Rilling G,F(xiàn)landrin P,Goncalves P.On empirical mode decomposition and its algorithms.[C].IEEE-EURASIP workshop on nonlinear signal and image processing NSIP-03,Grado(I),2003.
[14]Li S W,Tian J J,Kui H L,et al.Design and implementation of vehicle monitoring and early-warning system based on wince[J].Proceeding of international conference on electric information and control engineering,2011(8):2073-2076.
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25