基于單變量與多變量系統的模型預測控制研究
2013-09-10 01:17:24高強,李航
計算機工程與設計 2013年9期
高 強,李 航
(天津理工大學自動化學院天津市復雜系統控制理論及應用重點實驗室,天津300384)
0 引 言
由于連續流程工業工藝流程的不斷復雜,系統非線性、強耦合性以及多變量系統的穩定控制等問題的不斷突出,導致常規PID控制策略無法得到切實有效的施展。實際工業中存在的技術問題也不斷的推進著理論的發展,從20世紀70年代問世以來,模型預測控制已經從最初在工業過程控制中應用發展成為一個理論豐富和實踐內容較強的學科。模型預測控制在復雜工業過程中的成功應用,已充分彰顯出模型預測控制技術處理復雜控制問題的優越性。本文以單容水箱控制系統以及精餾塔控制系統為例,闡述動態矩陣控制算法如何處理單變量與多變量控制系統,利用仿真技術驗證動態矩陣控制算法的先進性與有效性,并利用DCS系統為平臺,以上述被控系統為研究對象,就工業中動態矩陣控制器的設計與應用等問題進行詳細闡述。
1 模型預測控制
模型預測控制策略在過程工業等其他領域的應用正在不斷發展與擴大。其廣泛應用的主要原因是:與常規控制策略相比,模型預測控制表現出更優異的控制效果;模型預測控制以被控系統預測模型為基礎,采用滾動優化與反饋校正相結合方式,使被控系統以最快的時間達到穩定運行;模型預測控制算法引入了執行器的約束條件;模型預測控制算法在解決被控系統的非線性、強耦合等復雜問題具有顯著效果。在模型預測控制算法中以動態矩陣控制算法為基礎核心。
1.1 動態矩陣控制 (DMC)
動態矩陣控制算法是一種基于被控系統階躍響應為預測模型,以優化指標來決定控制策略的預測控制算法。動態矩陣控制算法適用于漸進穩定的系統。然而對于實際系統的被控變量存在震蕩特性 (機械運動控制系統)與積分特性 (過程液位控制系統)而言,若利用動態矩陣控制算法,則首先需要采用常規PID控制策略對其加以控制使之穩定。換句話說就是利用動態矩陣控制器作為主控制器去指導下屬的PID控制器,使系統達到穩定值。
1.2 階躍響應模型預測
動態矩陣控制算法中的預測模型是基于對被控系統施加階躍信號,觀察系統的階躍響應而得到的非參數模型的基礎上開展的。
1.3 滾動優化
動態矩陣控制算法以預測模型作為約束條件,利用優化性能指標,在每一時刻提出優化后一系列控制增量,并采用當前時刻的控制增量作用于被控系統中,到下一時刻繼續優化控制增量。
1.4 反饋校正
為防止預測模型的輸出值偏離被控系統的實際輸出值,導致下一時刻優化的控制增量在錯誤的基礎上而提出的。動態矩陣控制算法利用反饋校正,在每一時刻修正預測輸出,保證優化的控制增量正確實施于被控系統中,使被控變量達到設定值并穩定。
2 單變量系統的動態矩陣控制
單容水箱作為典型的單入單出 (SISO)控制系統,其中針對水箱的液位控制可以說是過程控制的研究基礎與重點。此外,一些高級控制算法,例如模糊控制、神經網絡控制技術也對單容水箱的液位控制做了許多研究,取得了顯著的效果。因此,本文對單變量系統的動態矩陣控制研究采用單容水箱作為被控對象,以其液位作為被控變量。分別從系統仿真以及實際控制這兩方面闡述動態矩陣控制算法在處理單變量系統的先進性與實用性。
2.1 單變量系統預測模型
動態矩陣控制在獲得單入單出 (SISO)系統的預測模型方面,是通過對系統的階躍響應提供的非參數模型而得到的。對被控系統輸入端施加階躍信號,采集被控系統輸出端的響應輸出,直至系統趨于穩定為止。被控系統的階躍響應采樣值為

式中:T——階躍響應的采樣周期,βi——系統階躍響應在該時刻的幅值。對于動態矩陣控制算法而言,要求被控系統的階躍響應在某一時刻tN=NT之后趨于穩定。因此,利用被控系統階躍響應而得到的非參數模型可利用有限集合表示為

式 (2)提供的有限集合完全描述了被控系統的階躍響應信息。對于單變量系統的動態矩陣控制算法所需的預測模型以向量

作為模型向量,N作為模型的時域,也稱為模型的長度。
以被控系統階躍響應而提供的非參數模型為基礎可以預測出系統在未來時刻的輸出值。在k時刻起通過控制增量△u,就可以得出在該控制增量下未來N個時刻系統的輸出值

而動態矩陣控制算法中的控制時域M作為一個重要參數,通常不可能只采用一個控制增量去承擔全部優化時域的控制要求。因此,在假設M個控制增量作用于被控系統中后,被控系統的預測輸出為:

2.2 單變量系統滾動優化
動態矩陣控制是一種利用優化性能指標決定控制策略的算法,優化性能指標為
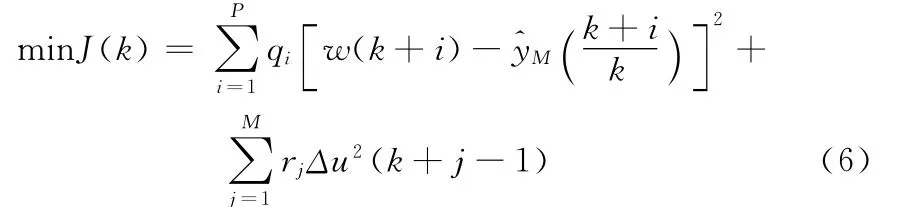
式中:qi、rj——優化性能指標的加權系數,分別表示對跟蹤誤差及控制作用變化的抑制。性能指標的向量形式為

式 (7)中wp(k)= [w(k+1),....,w(k+P)]T,Q=diag(q1,....,qP),為誤差加權矩陣;R =diag(r1,.....rM),為控制加權矩陣。
在每一個時刻k,都要從該時刻起利用優化性能指標確定出M個控制增量

將計算得到的M個控制增量利用式 (5)的單變量系統預測模型計算出被控系統從k時刻起的預測輸出,從而確保被控系統的預測輸出盡可能的接近系統的設定值。
動態矩陣控制可以理解為以控制增量

為優化變量,利用以被控系統的階躍響應而得到的預測模型為基礎,使優化性能指標達到最小的問題。按照中這個思路,可得到

其中有限集合

作為動態矩陣控制的優化控制增量。然而,動態矩陣控制算法并不將利用優化性能指標而得到的M個控制增量全部施加于被控系統中,而是取當前時刻的控制增量△u(k)作為系統的控制增量。利用

施加于被控系統中,其中Δu的表達公式為

稱為控制向量。待被控系統運行到下一時刻,結合下述反饋校正環節,再次根據預測模型,利用優化性能指標計算出當前時刻的優化控制增量△UM(k+1),仍然只取當前時刻的控制增量施加于被控系統中,如此反復執行,實現動態矩陣控制的滾動優化。
2.3 單變量系統反饋校正
在k時刻將優化后得到的控制增量△u(k)施加于被控系統中,相當于對被控系統施加一個階躍信號,利用預測模型 (5)可以得到在該控制增量作用下的預測輸出

為了彌補這一問題,動態矩陣控制將優化后的控制增量△u(k)施加于被控系統后,到下一采樣時刻首先會采集被控系統的實際輸出值y(k+1),并將其與在控制增量作用下的預測輸出進行比較,得出輸出誤差

動態矩陣控制算法的反饋校正并不是對預測模型進行修正,而是采用對誤差e(k+1)加權的方式修正對未來輸出的預測

其中

動態矩陣控制算法就是利用預測模型作為約束條件,利用優化性能指標將滾動優化與反饋校正相結合反復在線運算提出每一時刻的優化控制增量△u(k),使系統的被控變量不斷趨近與系統的設定值并保持穩定。
2.4 控制系統仿真研究
動態矩陣控制效果仿真研究中,采用的單容水箱數學模型是通過機理建模而得到的,不僅考慮了單容水箱輸入與輸出的動態平衡關系,同時也引入了電機與水泵的數學模型,最終得到的系統傳遞函數為

以該系統的傳遞函數為基礎,分別采用經典控制理論中的PID控制策略與模型預測控制中的動態矩陣控制算法進行控制仿真,其效果如圖1,圖2所示。
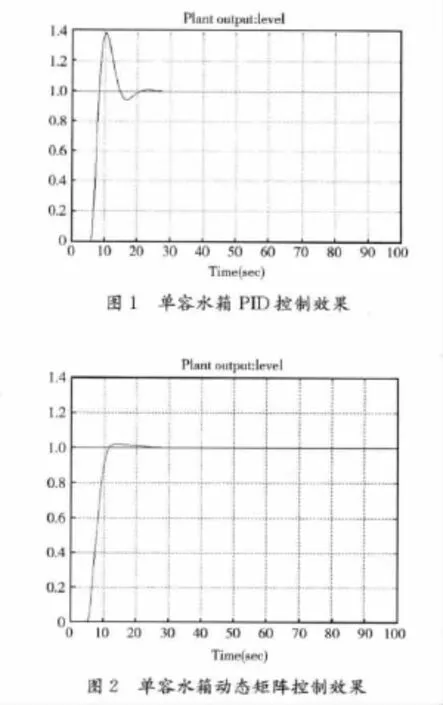
從圖1、圖2中可明顯發現,針對單變量控制系統而言,動態矩陣控制算法比PID控制策略具有更好的控制效果,被控系統的超調量與調節時間均得到改善。
這里的動態矩陣控制所采用的調節參數見表1。
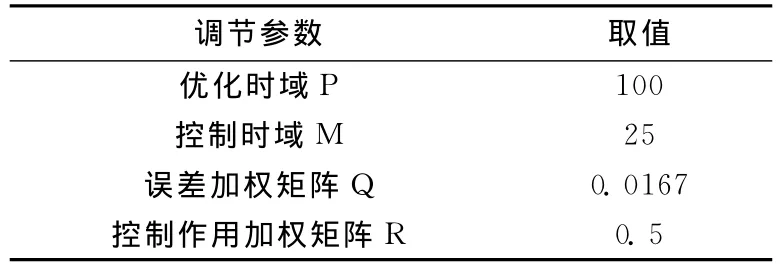
表1 動態矩陣控制調節參數
2.5 單變量系統動態矩陣控制工程實現
本文對于單變量控制系統的動態矩陣控制研究采用單容水箱作為被控對象。動態矩陣控制器的開發與應用是基于西門子PCS7的DCS系統進行研究的。
2.5.1 單容水箱系統的過程辨識
從理論分析得知,動態矩陣控制所需的預測模型是以被控系統階躍響應而提供的非參數模型基礎上獲得的。因此,在設計動態矩陣控制器時,首先需要獲得被控系統的階躍響應數據。利用DCS系統的過程數據采集系統,以1s作為采樣周期,實時采集被控系統的操作變量與被控變量。如圖3所示。
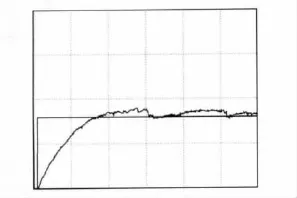
圖3 單容水箱階躍響應采集
DCS系統對被控對象的階躍響應進行數據采集,利用階躍響應辨識系統的非參數模型。辨識后的模型輸出應與被控系統的實際輸出基本保持一致,如圖4所示。
2.5.2 動態矩陣控制器調節參數
利用辨識模型可得到動態矩陣控制算法所需的預測模型,以預測模型為約束,調節參數的不同所表現的控制效果也不同。針對單容水箱的動態矩陣控制器調節參數見表2。

表2 動態矩陣控制器調節參數
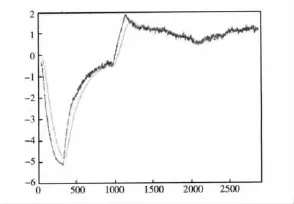
圖4 單容水箱系統辨識精確度
利用表2提供的動態矩陣控制器調節參數,結合系統辨識后得到的預測模型,對單容水箱被控對象的仿真控制效果如圖5所示。
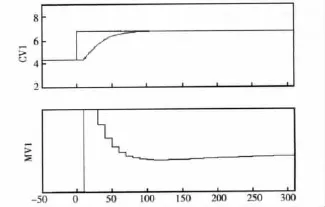
圖5 單容水箱仿真控制效果
2.5.3 實際系統控制效果
利用DCS系統采樣后得到的非參數模型,得到動態矩陣控制器所需的預測模型,并結合上述調節參數,動態矩陣控制器將滾動優化與反饋校正相結合,對單容水箱的實際控制效果如圖6所示。
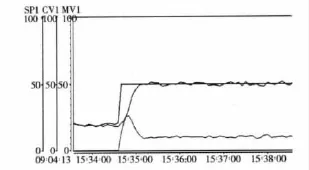
圖6 單容水箱動態矩陣控制效果
3 多變量系統的動態矩陣控制
精餾塔在過程控制中作為一個典型的多入多處 (MIMO)控制系統,并且也常常作為模型預測控制技術的研究對象,本文以精餾塔作為動態矩陣控制的研究對象,通過對精餾塔進行數學建模,利用仿真驗證動態矩陣控制算法在處理多變量系統的優越性。同時,以DCS系統為平臺,設計動態矩陣控制器,應用與精餾塔控制系統中,驗證其效果。闡述動態矩陣控制算法在處理多變量系統的理論步驟以及工程應用。
3.1 多變量系統預測模型
對于多入多出系統 (MIMO),動態矩陣控制算法仍然采用該被控系統的階躍響應提供的非參數做模型為基礎,得到預測模型。在獲得多變量系統的階躍響應信息方面,應逐一的對輸入端施加階躍信號,分別觀察每一個輸出端的階躍響應,直到所有輸出響應趨于穩定為止。例如,對被控制系統的輸入端x施加階躍信號,在k時刻觀察被控系統所有輸出端的階躍響應為

因此,在對每一個輸入端逐一施加階躍信號后,觀察每一個輸出端的階躍響應,可利用矩陣形式提出多變量系統的非參數模型
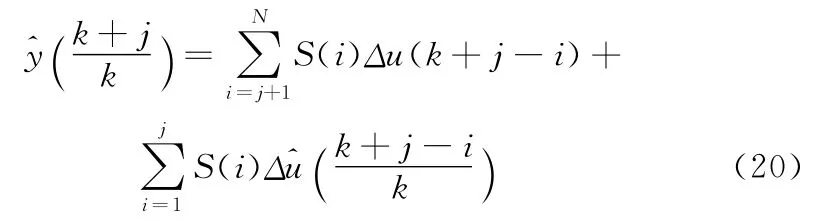
利用多入多出系統的非參數模型可以得到動態矩陣控制算法所需的預測模型為
3.2 多變量系統滾動優化
多變量系統的滾動優化方式與單變量系統相類似,多變量系統的滾動優化要求系統每一個輸出yi在未來P個優化時域內,盡量趨近于系統設定值wi,并對M個控制作用增量的大小加以軟約束。其優化性能指標

其中
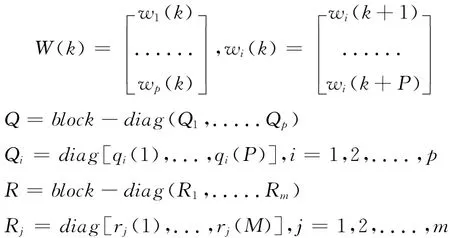
其中誤差加權矩陣Q中各個塊Q1,….Qp對應著不同的輸出,而Qi中的元素對應著yi在不同時刻的跟蹤誤差。同樣,控制作用加權矩陣R中各個塊R1,…,Rm對應著不同的控制輸入,而Rj中的元素對應著uj在不同時刻的控制作用增量的抑制。所以矩陣Q和R中的每一個元素都對被控系統的在動態矩陣控制作用下的控制效果起到重要的決定作用。
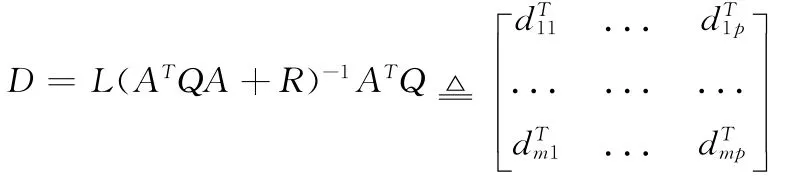
通過上述介紹的多變量系統的預測模型 (式 (20)),利用優化性能指標 (式 (21))可以得出在當前時刻的M個被優化后的控制增量

根據之前所闡述的單入單出系統的滾動優化概念,對于多變量控制系統同樣采用當前時刻k的控制增量

施加于被控系統中,其中
3.3 多變量系統反饋校正
多變量系統的反饋校正與單變量系統類似,在k時刻控制增量作用于被控系統后,到下一時刻,動態矩陣控制算法需對被控系統的實際輸出值與各個預測輸出值進行比較,構成輸出誤差向量
同樣采用對誤差向量加權的方式修正模型的預測輸出值,以此補償基于模型的預測
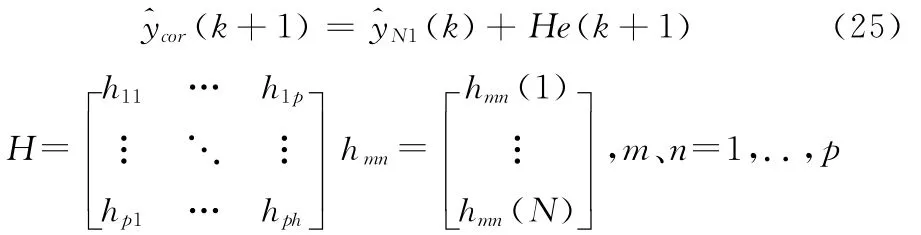
H稱為誤差校正矩陣,通常只采用誤差校正向量的主對角塊,也就是用各輸出值的誤差通過加權修正預測輸出值。同樣,k+1時刻的校正預測輸出值通過移位成為該時刻預測模型的初始值參與滾動優化工作。
3.4 控制系統仿真研究
本文利用精餾塔數學模型對多變量動態矩陣控制算法的控制效果進行仿真,驗證動態矩陣控制技術在處理多變量非線性系統的控制問題上表現出的優越性。
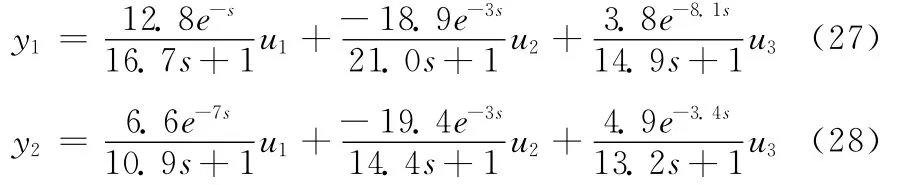
精餾塔的數學模型為
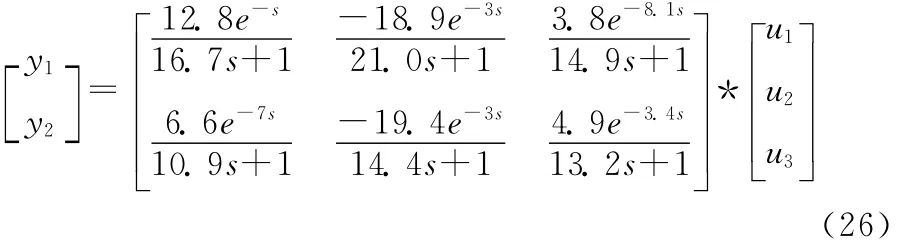
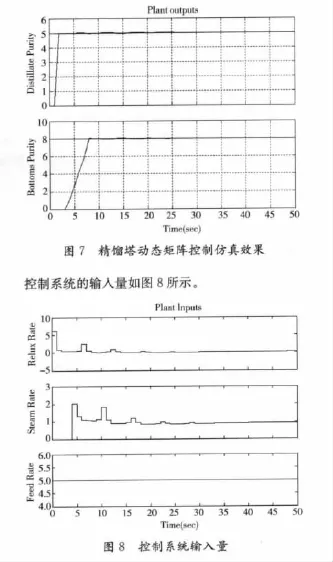
輸出y1,y2分別代表精餾塔的輕餾分與重餾分,u1,u2以及u3分別代表精餾塔蒸發器流量、回流冷凝器流量以及進料的干擾量。精餾塔數學模型由六組一階慣性加滯后環節組成,每個輸出量分別由每個輸入量結合該控制通道的傳遞函數現行疊加組成,即
通過仿真可以發現,動態矩陣控制在處理多變量系統中所具有的優勢,其針對精餾塔被控系統的動態矩陣控制效果如圖7所示。
這里的多變量系統動態矩陣控制所采用的調節參數見表3。
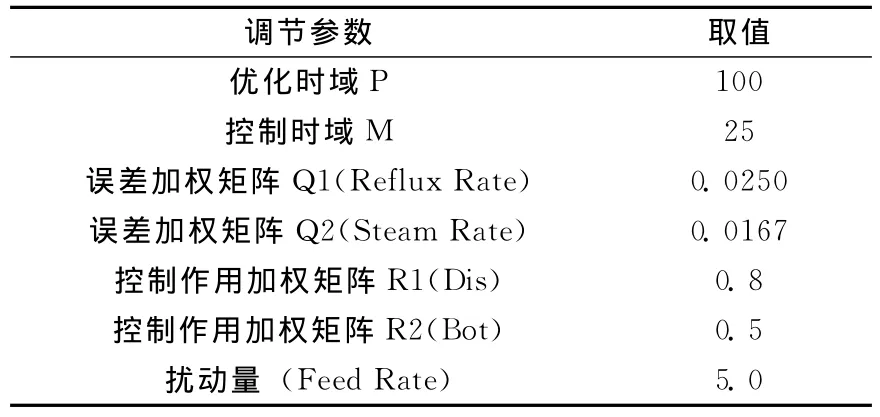
表3 動態矩陣控制器調節參數
3.5 多變量系統動態矩陣控制工程實現
對多變量系統的動態矩陣控制器的設計與應用同樣基于DCS系統平臺而研究的。
3.5.1 精餾塔系統過程辨識
以多變量控制系統的動態矩陣控制算法仍然是在以被控系統的階躍響應而得到的非參數模型基礎上得到預測模型的。然而在獲取被控系統的階躍響應時,與單入單出系統有所不同。根據上述對多變量系統的預測模型研究中可以發現,如要獲得多變量系統的階躍響應需對被控系統的每一個輸入端分別施加階躍信號,待所有輸出端變量趨于穩定為止。對于獲取多變量系統的階躍響應數據,同樣采用DCS的過程數據采集系統,以1s作為采樣周期來完成的,如圖9所示。
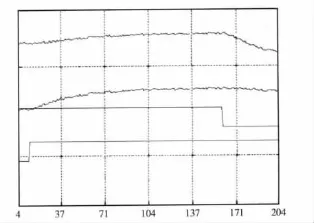
圖9 精餾塔階躍響應采集
對多變量系統進行階躍響應信息采集后,得到的模型輸出應與被控系統實際輸出響應保持一直,這樣得到的模型才可以保證其精度。多變量系統的模型輸出與被控系統實際輸出如圖10所示。
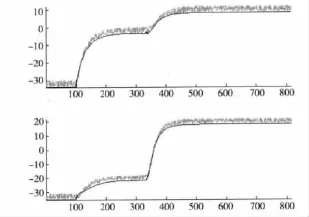
圖10 精餾塔系統辨識精確度
3.5.2 動態矩陣控制器調節參數
以被控系統的階躍響應提供的非參數模型為基礎得到動態矩陣控制算法所需的預測模型。由上述動態矩陣控制算法處理過程可發現,參數P,M,Q,R對動態矩陣控制算法的控制效果起到重要作用,具體參數見表4。
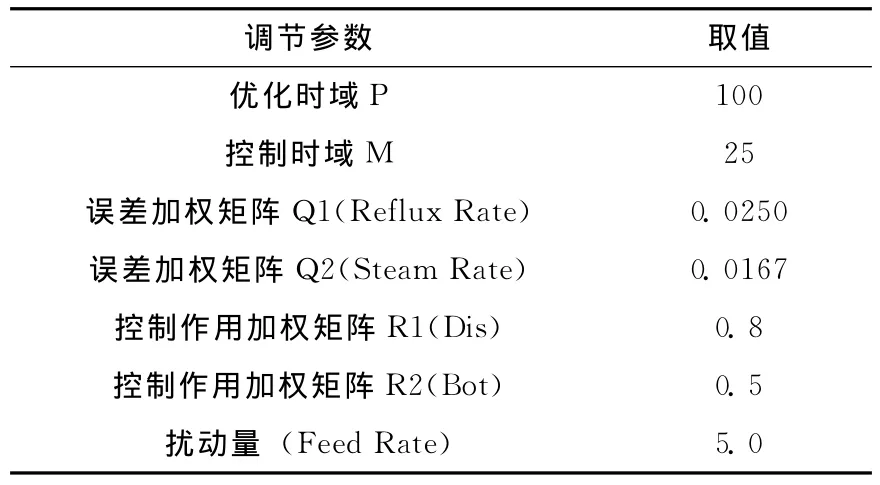
表4 動態矩陣控制器調節參數
利用表4提供的動態矩陣控制調節參數,對精餾塔提出的動態矩陣控制算法仿真效果如圖11所示。
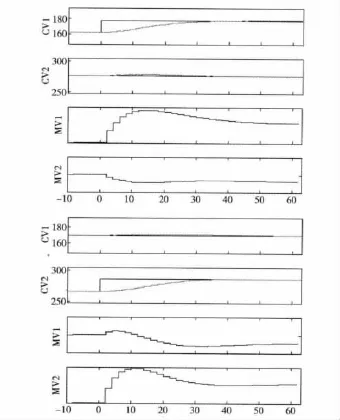
圖11 精餾塔仿真控制效果
3.5.3 精餾塔系統實際控制效果
對精餾塔控制系統采用上述設計的動態矩陣控制算法實現的實際控制效果如圖12所示。
4 結束語
通過仿真與實際控制效果中發現,模型預測控制中在處理單變量系統中具有比常規PID控制策略更好的控制效果,在解決多變量系統,尤其是變量之間存在嚴重耦合現象的控制問題中也具有明顯的優勢。
然而模型預測控制中的動態矩陣控制算法所需的計算量較大并且適用于漸進穩定的慢動態過程,在處理快速性系統的控制問題中表現欠佳,從而限制了該算法在運動控制系統中的應用。
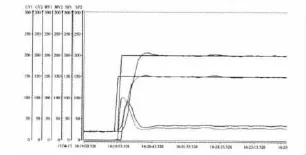
圖12 精餾塔動態矩陣控制效果
從實際應用角度考慮,模型預測控制器的設計與實現較為復雜,在數據采集、系統辨識、算法運算上會面臨諸多困難,某些方面仍需借助國外的先進控制軟件。為解決這幾方面的問題仍需專家與學者繼續深入研究。
[1]XI Yugeng,LI Dewei. Model predictive control-status and challenges [J].Acta Automation Sinica,2013,39 (3):222-236 (in Chinese). [席裕庚,李德偉.模型預測控制-現狀與挑戰 [J].自動化學報,2013,39 (3):222-236.]
[2]ZHANG Jinshan,GAO Qiang,LI Hang,et al.New hard-inthe-loop simulation system used in process control system [J].Computer Engineering and Design,2013,34 (4):1356-1360(in Chinese).[張金山,高強,李航,等.新型的應用于過程控制的半實物仿真系統 [J].計算機工程與設計,2013,34(4):1356-1360.]
[3]QIAN Jixin,ZHAO Jun,XU Zuhua.Predictive control[M].Beijing:Chemical Industry Press,2007 (in Chinese). [錢積新,趙均,徐祖華.預測控制 [M].北京:化學工業出版社,2007.]
[4]XI Yugeng,LI Dewei.Fundamental philosophy and status of qualitative synthesis of model predictive control [J].Acta Automation Sinica,2008,34 (10):1225-1234 (in Chinese).[席裕庚,李德偉.預測控制定性綜合理論的基本思路和研究現狀 [J]自動化學報,2008,34 (10):1225-1234.]
[5]WEI Danhua,HE Jianzhong.Research on dynamic matrix control of evaporator superheat system with time-delay [J].Computer Engineering and Applications,2013,49 (1):254-257 (in Chinese).[衛丹華,何建忠.蒸發器過熱度時滯系統的動態矩陣控制研究 [J].計算機工程與應用,2013,49 (1):254-257.]
[6]HONG Xinyi.The application of advanced process control technology in the ethylene distillation column [J].Automation in Petro-Chemical Industry,2009,45 (5):40-43 (in Chinese).[洪新藝.先進控制技術在乙烯精餾塔中的應用 [J].石油化工自動化,2009,45 (5):40-43.]
[7]JIN Xiaoming,GE Juanjuan.Applied research of multi-objective optimal control strategy in distillation column [J].Control Engineering of China,2012,19 (1):161-164 (in Chinese).[金曉明,葛娟娟.多目標優化策略在精餾塔過程中的應用研究 [J].控制工程,2012,19 (1):161-164.]
[8]ZHAO Xuan,HE Defeng,ZHOU Zhou.Analyze on the stability of multivariable DMC algorithm in networked control systems [J].Journal of Zhejiang University of Technology,2012,40 (2):209-212 (in Chinese).[趙旋,何德峰,周洲.網絡控制系統多變量DMC算法的穩定性分析 [J].浙江工業大學學報,2012,40 (2):209-212.]
[9]GAO Yanying,JI Bin,BAI Guangli.The application of temperature control based on model predictive control [J].Indus-try Control and Applications,2011,30 (6):6-9 (in Chinese).[高延英,紀彬,白廣利.基于模型預測控制在溫度控制中的應用 [J].工業控制與應用,2011,30 (6):6-9.]
[10]ZHOU Rongqiang,LUO Zhen.Simulated research on DMCPID cascade level control for dual vessel water tank [J].Automation &Instrumentation,2011,32 (10):63-65 (in Chinese).[周榮強,羅真.雙容水箱液位DMC-PID串級控制仿真研究 [J].自動化儀表,2011,32 (10):63-65.]
[11]LIU Tengteng,WANG Weiyi.Predictive control and simulation using MATLAB and VC for an MIMO system [J].Computer Engineering and Science,2011,33 (11):154-159 (in Chinese). [劉騰騰,王唯一.MIMO系統預測控制及其Matalb與VC仿真實現 [J].計算機工程與科學,2011,33 (11):154-159.]
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19