基于單電阻的變頻壓縮機相電流重構方法*
2013-09-13 06:07:08黃躍進顧江萍
機電工程 2013年4期
李 岳,徐 鳴,黃躍進,顧江萍,沈 希
(浙江工業大學 機械工程學院,浙江 杭州 310014)
0 引 言
近年來,采用磁場定向控制技術(FOC)的直流變頻壓縮機驅動技術在變頻冰箱、變頻空調系統中得到了廣泛的應用。為了實現壓縮機電機的高性能控制,精確地采樣定子相電流是至關重要的。目前的采樣方法包括雙電阻采樣方法和單電阻采樣方法。雙電阻采樣方式實際上是在三相逆變器下橋臂串聯3 個采樣電阻進行電流采樣。但是該方法不適合下橋臂不開放的智能功率模塊(IPM)的應用場合,而且三電阻需要較大的PCB 布板面積并造成一定的電路損耗[1]。而單電阻采樣法則很好地解決了這些問題。因此單電阻采樣法被廣泛研究與應用。
壓縮機電動機運行過程中,系統可以對直流母線電流進行檢測,重構三相電流,來實現電流閉環控制。Green[2]首次提出利用母線電流來重構電動機相電流波形。Lee 等[3]對單電阻電流重構技術進行了一系列的研究,并提出了PWM 波移相的方法和電流觀測器的方法。儲劍波等人[4]提出了一種易于DSP 實現的空間矢量移相方法。
本研究擬采用電流觀測器的方法,通過對母線電流的采樣值和相應的開關量進行分析計算,建立預測電流觀測器,從而完成對三相相電流的重構,實現電機電流閉環控制。
1 永磁同步電機數學模型
永磁同步電機在三相靜止坐標系下定子繞組電壓平衡方程如下[5]:

式中:Va,Vb,Vc—三相坐標軸定子電壓;R—三相繞阻;ia,ib,ic—三相相電流;L—三相繞組的電感;ea,eb,ec—電壓反電動勢。
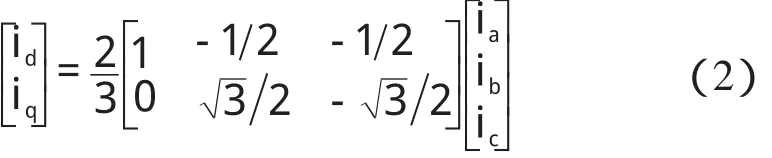
通過Park 變換可以將三相電流變換到同步旋轉d-q 坐標系上。三相電流不一定是對稱的或平衡的,但是它們瞬時的矢量綜合一定等于零,即ia+ib+ic=0,那么它們在靜止坐標系(θ=0)下,可以由下面的公式表示:
2 單電阻采樣電流原理及其難點分析
本研究的控制對象為變頻壓縮機,實質是對永磁同步電機的控制,其控制方法為空間矢量電壓法(SVPWM),其主要思想為:以三相對稱正弦波電壓供電式交流電動機的定子理想磁鏈圓為參考標準,以三相逆變器不同開關模式作適當的切換,從而形成PWM波,以所形成的實際磁鏈矢量來追蹤其準確磁鏈圓[6]。
根據每相下橋臂T2、T4、T6的開關狀態,可以產生6 組基本的非零空間矢量,即V1(001),V2(010),V3(011),V4(100),V5(101),V6(110)和2 組零矢量V0(000),V7(111)[7]。而 T1、T3、T5的開關狀態與 T2、T4、T6互補。單電阻相電流檢測電路如圖1 所示。在不同的非零空間矢量作用下逆變器的開關狀態不同,直流母線電流對應的相電流也不同。研究者在使用非零的基本矢量時,通過采樣母線電流Idc就可以根據公式ia+ib+ic=0,通過邏輯分析分解出各相電流的值,從而完成對三相電流的重構。母線電流與三相電流之間的關系如表1 所示。
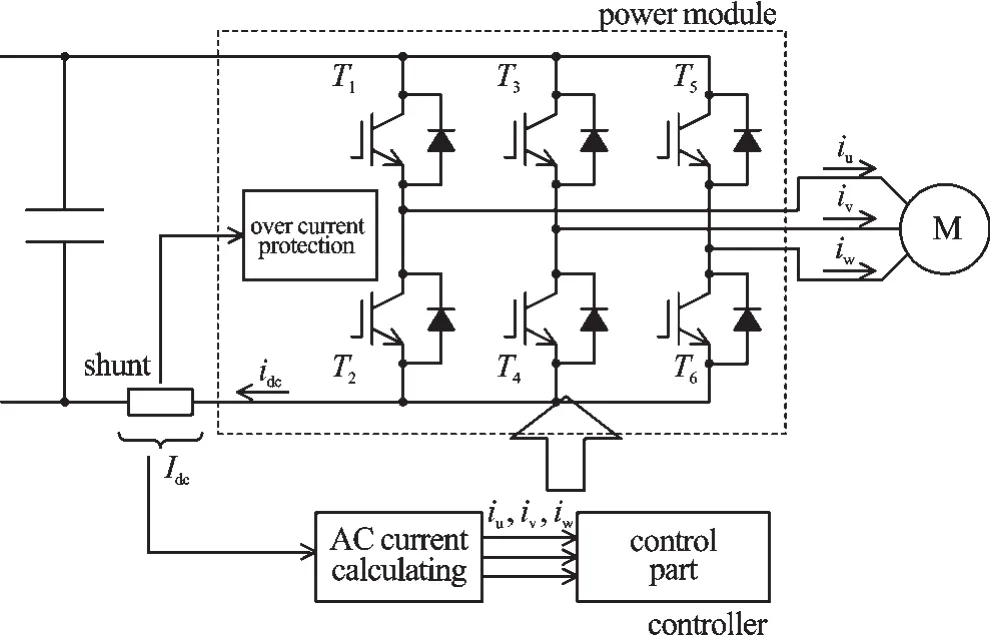
圖1 電流檢測原理圖
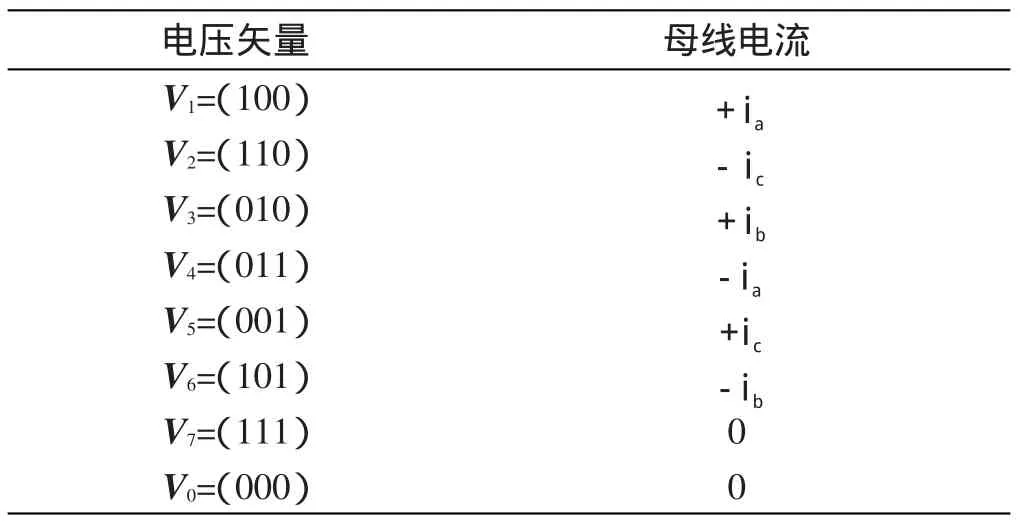
表1 母線電流與電機三相電流的關系
以第1 扇區為例,其SVPWM 波形示意圖如圖2 所示。參考電壓矢量Vref由V1(100),V2(110),V7(111)和零矢量合成,采用中心對稱模式,一個PWM 周期被分為7 個時間段。在V7(111)和V0(000)作用的3 個時間段內,電阻中的電流為0。在其余的時間段,由于PWM 為中心對稱模式,電阻中的電流是對稱的。當V1(100)作用時,通過檢測母線電流Idc,可以得到 +ia=Idc,此時母線上的電流等于A 相電流。同理,當V2(110)作用時,可以得到C 相的電流ic,那么由ia+ib+ic=0 計算求得ib=-ia-ic。
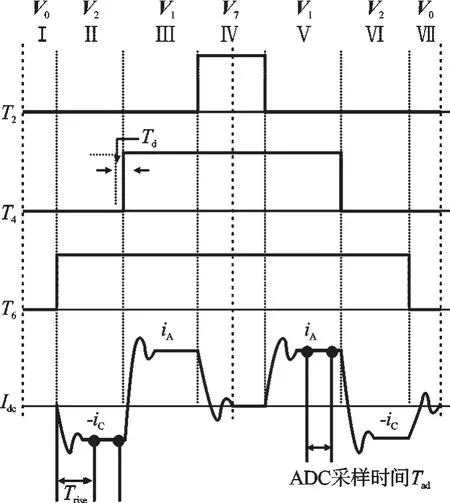
圖2 第1 扇區SVPWM 波形示意圖
上述方法存在的局限性在于必須有一個最小時間量Tmin來確保電阻上的電流被采樣到,即:

式中:Td—死區時間,避免上、下橋臂同時導通;TRise—確保采樣前母線電流完全建立需要的穩定時間,這段時間內還包括了IGBT 的和驅動電路的延遲時間;Tad—A/D 采樣和保持時間。
如果減少了Td、TRise和T ad,那么PWM 信號的持續時間將會減少。也就是說參考電壓矢量處于低調制區域或者非可觀測區域時,是不可能得到最短時間Tmin的。相電流不可測區域電壓矢量圖如圖3 所示。
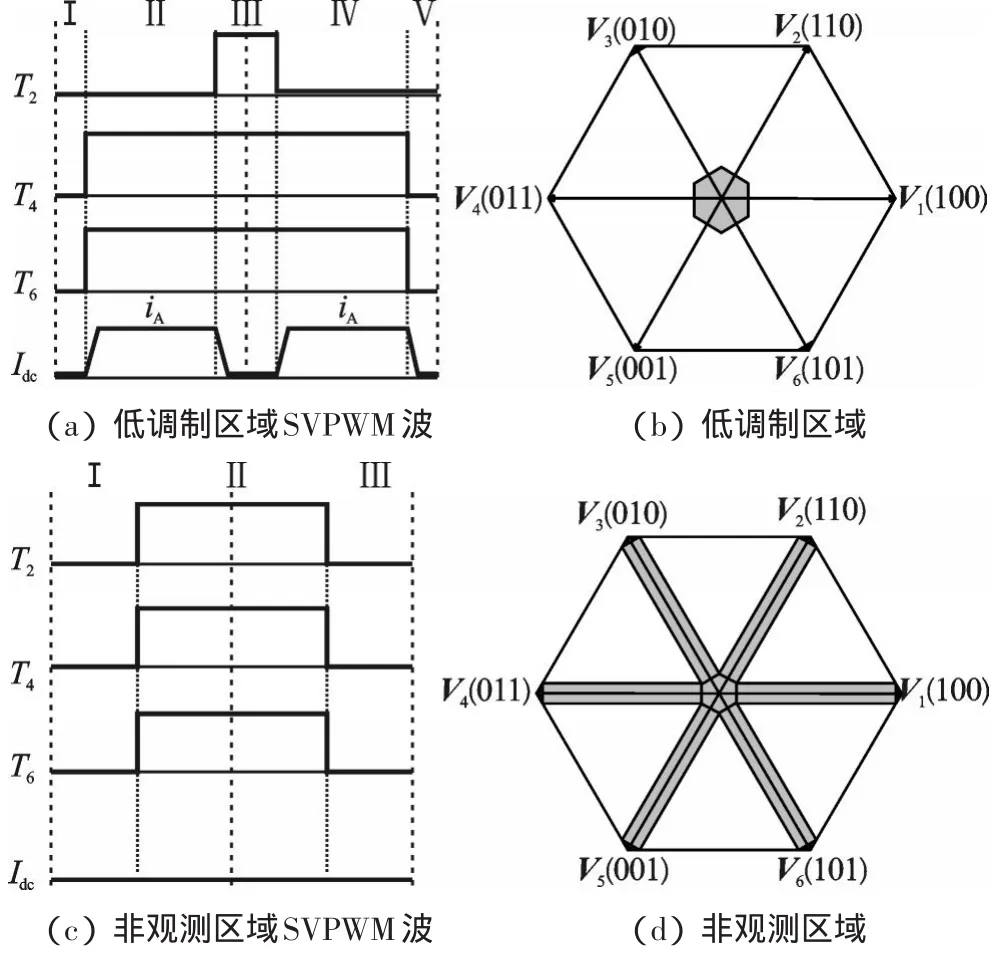
圖3 相電流不可測區域電壓矢量圖
參考電壓矢量處于低調制區域的情況如圖3(a)所示,3 個橋臂的占空比幾乎相同。在這種情況下,7個子時間段變成3 個,在3 個時間段中,流過采樣電阻的電流為0。也就意味著當電壓矢量進入如圖3(b)所示的陰影區域時,無法采到相電流。
參考電壓矢量處于在中、高調制區的情況如圖3(c)所示。在相鄰的兩個空間矢量扇區的邊界區域,有兩個橋臂的占空比幾乎相同。在這種情況下,7 個子時間段變成了5 個,兩個相電流只能準確獲得一相的電流,不能實現三相電流的重構。非觀測區域如圖3(d)所示,在6 個扇區中,陰影部分表示只有一相電流可以被測量出,這個區域為非觀測區域。以第一扇區為例,當參考電壓矢量進入陰影區域,即非觀測區域區域時,電壓矢量V1(100)作用的時間足夠長,可以通過母線電流重構獲得A 相的電流 +ia。但是V2(110)作用時間非常短,不能通過采樣電流重構獲得 -ic。
3 通過預測狀態觀測器計算Idq
為了解決上述問題,文獻[7]提出了附加矢量的方法,通過調整一個開關周期內的占空比,獲得一個具有不同相位和幅值的附加矢量來減少零向量的作用時間,從而使得能夠重構相電流的母線電流可以被采樣到。但是這種方法使得PWM 產生過程中切換模式變為不再對稱,增加了開關損耗,另外,在利用DSP處理時不易實現。文獻[3]采用了PWM 波移相的方法,將一個PWM 周期內占空比最大和最小的對應的PWM 波進行前后平移,來獲得足夠的采樣時間。但是該方法的局限在于:在高調制區域,非觀測區域內零矢量的作用時間非常小,通過PWM 移相后只能準確獲得其中一相的電流值。
本研究采用電流觀測器的方法,在中、高調制區域通過一相的電流值,可以很好地獲得相對準確的三相電流值[9-10]。電流觀測器的輸入量為采樣電流與預測電流的誤差和相應的開關量等。輸出量則為電機定子坐標系下的電流id,iq。對式(1)進行整理可得:

對式(4)進行離散化處理可以得到:

其中:

式中:Ts—采樣周期,I2—二階單位矩陣。
通過式(5)可以構建一個簡單的開環狀態觀測器,利用實際電流矢量預測下一個采樣時刻。但是,這樣做存在著預測誤差,只能初步得到電流的估計值或整流器的參數值。因此,研究者可以定義一個附加項z,將其與估計值和誤差相結合,以得到一個閉環的電流觀測器:

其中:

式中:T—采樣時間。
且:

式中:is(n)—采樣到的電流矢量,i^(n)—預測的電流矢量。
則采樣電流與預測電流的誤差ε=i^(n)-is(n),對于使用單傳感器控制器時,直接獲得is(n) 是不可能的,只能通過采樣母線電流去計算得出。
因此當只有A 相電流被精確檢測到時,補償差值

則由公式(5~7),可以得到:

則:

則:

本研究基于電機數學模型的電流觀測器的估算電流和實際電流誤差,由公式(8~10)建立了電流觀測器,得到了非觀測區域的電流值,結合上面得出的可觀測區域的電流值,完成了對三相電流的重構,為轉子位置的檢測與閉環控制提供了參考依據。
4 實驗結果分析
該實驗基于STM32F103RB 控制芯片的變頻器的硬件平臺。STM32F103RB 的A/D 轉換精度為12 位,最快轉換速度為1 MHz。A/D 轉換的值通過DMA 中斷進行平均值計算,能夠保證采樣數據的穩定性。本研究采用STM32F103RB 內的高級定時器TIM1 的4 個通道進行SVPWM 的產生和ADC 的觸發采樣。相電流的ADC 轉換由PWM4 的上升沿觸發,可以保證A/D 電流采樣和SVPWM 輸出的同步性。
該實驗選取壓縮機參數最大電流為3 A,極對數為2。逆變器采用SANKEN 公司生產的智能功率模塊SLA6805,該模塊集成了6 個IGBT 及其前置驅動、過流保護、死區控制等功能模塊。
電流采樣電路如圖4 所示,包括一個放大電路、一個光耦隔離電路和一個信號調理電路。在電流采樣過程中,STM32 內部設置A/D 采樣時間T ad 為2.55μs,TRise約為1μs,死區時間Td為1.5μs。則為了能夠正確的重構相電流信號,最小檢測時間Tmin設置為10μs,同時這個時間可以根據實際情況進行恰當的增加和減少。

圖4 單電阻電流采樣電路
整個系統的參數如表2 所示。

表2 系統參數
采樣電阻上的采樣信號經放大調理得到的波形如圖5 所示。通過對母線電流采樣后計算重構得到的A 相的相電流波形如圖6(a)所示。通過示波器實測得到的電動機A 相電流波形如圖6(b)所示。由圖6可以知道,重構的相電流與實際電機的相電流較吻合,表明相電流重構技術有效。
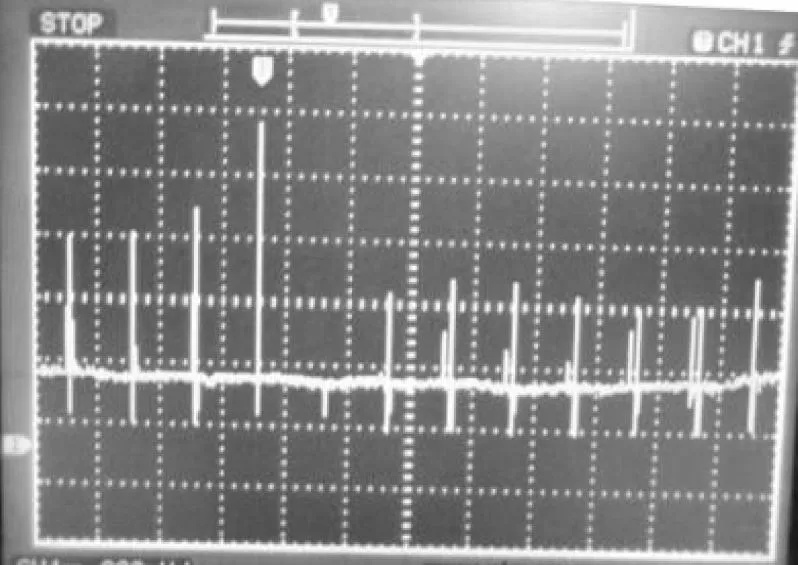
圖5 單電阻上的采樣信號
5 結束語
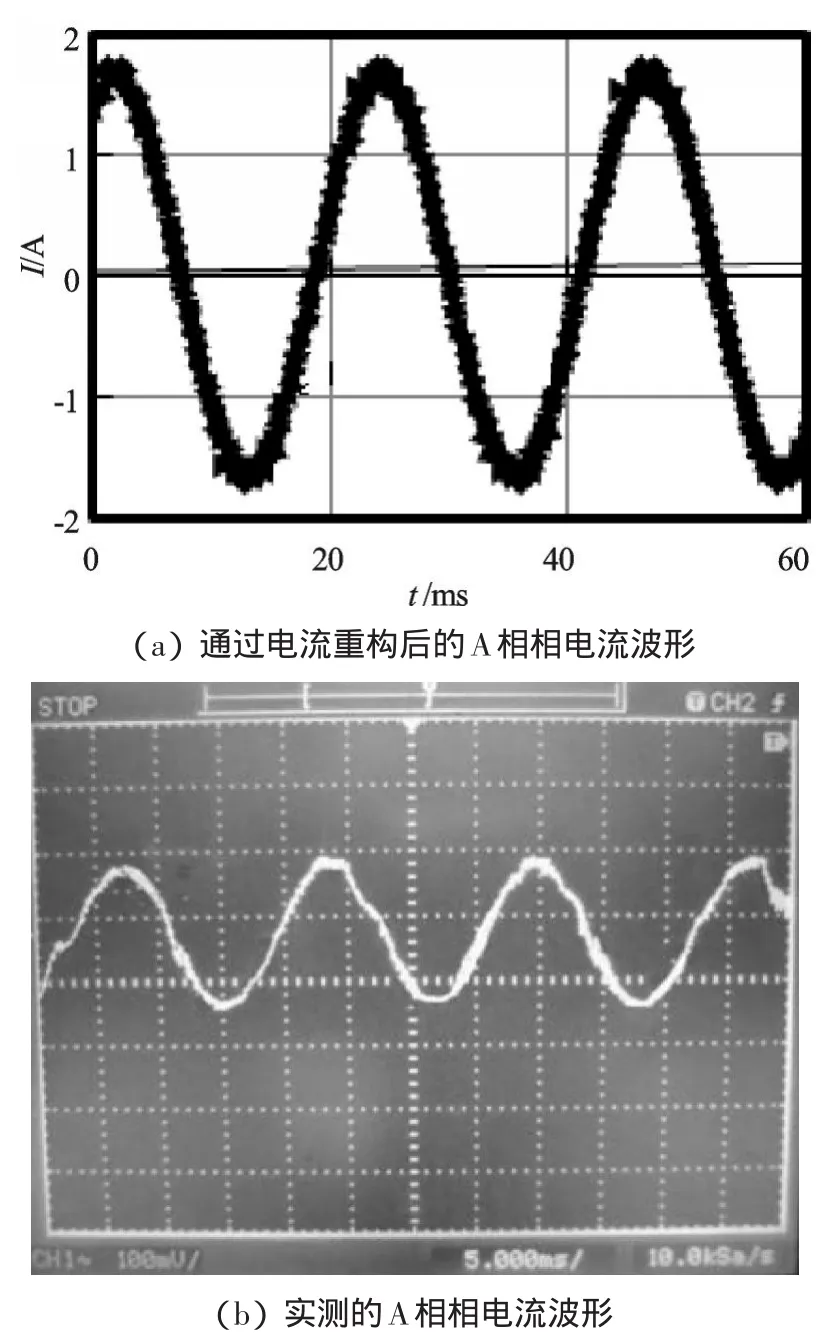
圖6 A 相相電流波形
對于無位置傳感器的永磁同步壓縮機,單電阻檢測母線電流并重構三相電流具有成本低、硬件簡單、精度高、易實現等優點。本研究對單電阻電流采樣重構三相電流技術進行了原理上的分析,并針對中、高頻調制區域的非觀測區域采用了預測狀態觀測器的數學方法。實驗結果證實,該方法能夠用于正確重構相電流,對于冰箱領域壓縮機的控制具有很高的實際應用意義。
(References):
[1]陳小波,黃文新,胡育文,等.變頻器單電阻電流采樣及相電流[J].電氣傳動,2010,40(8):3-6
[2]GREEN T C,WILLIAMS B W.Derivation of motor line-current wave forms from the dc-link current of an in?verter[J].Proc.Inst.Elect.Eng,1989,136(4):196-203.
[3]LEEW C,LEE T K,HYUN D S.Comparison of single-sen?sor current control in the DC link for three-phase volt?age-source PWM converters[J].IEEE Transactions on Industrial Electronics,2001,48(3):491-505.
[4]儲劍波,胡育文.一種變頻器相電流采樣重構技術[J].電工技術學報,2010,25(1):111-117.
[5]HARTANI K,MILOUD Y.Control strategy for three phase voltage source PWM rectifier based on the space vector modulation[J].Advances in Electrical and Computer Engineering,2010,10(3):61-65.
[6]高 強,劉桂花.一種永磁同步壓縮機三相電流重構方法[J],電機與控制學報,2009,13(2):267-271.
[7]陳小波,胡育文.基于單電阻電流采樣的矢量控制算法研究[J].電氣傳動,2011,41(5):15-19
[8]SARITHAAND B,JANAKIRAMAN P A.Sinusoidal three-phase current reconstruction and control using a DC-link current sensor and acurve-fitting observer[J].IEEE Transactions on Industrial Electronics,2007,54(5):2657-2664.
[9]LI Ying,ERTUGRUL N.An Observer-based Three-Phase CurrentReconstruction using DCLink Measurementin PMAC Motors[C]//IEEE 5th InternationalPower Electronicsand Mo?tion ControlConference.Shanghai:IEEEPress,2006:1-5.
[10]CHI S,WANG X.A Current reconstruction Scheme for Low-Cost PMSM Drives using Shunt Resistorsr[C]//APEC 2007.Benton Harbor:[s.n.],2007:1701-1706.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52