雙目立體視覺在機器人三維重建定位中的方法研究
2013-09-14 08:07:04曹凱
電子測試 2013年6期
曹 凱
(西安工業大學 電信學院,陜西西安 710021)
雙目立體視覺在機器人三維重建定位中的方法研究
曹 凱
(西安工業大學 電信學院,陜西西安 710021)
本文對雙目立體視覺在機器人三維重建定位中的方法研究,并提出了相應的解決方案。
立體視覺;立體匹配;三維重建
0 前言
信息技術的發展,讓人類數字化的進程在不斷加快,同時對于信息的精度要求越來越高。過去單一的信息處理方式已經不能滿足人們的需要,人們希望能夠以更加先進的信息處理方式,不斷的去進行方式方法的創新,以實現多維信息處理的智能計算機系統。這也是科學家們一起努力的方向,以期通過技術的進步以提升多維信息處理能力。信息專家們把實現多維信息的重要環節放在計算機視覺上。對于人類而言,由于信息的獲取方式主要是通過視覺這種方式來實現的,主要有百分之七十到百分之八十的信息來自于視覺。當前人們對于視覺系統知道的還比較少,因此,還沒有科學的原理來對視覺的識別的進行理性客觀的描述。對于計算機視覺的處理,要與多種學科建立密切的聯系,包括神經生理學、心理物理學等,這對計算機視覺的發展有重要的促進作用。對于數字圖像的處理與計算機視覺有著非常緊密的關系,這也是雙目立體視覺在機器人三維重建定位中的重要的方法依據,是正確的處理信息中的重要部分和關鍵技術。
1 研究意義
在對機器人技術進行研究中,被廣泛研究與應用的技術即是立體視覺技術。雙目立體視覺技術通過對同一個目標的兩幅圖片進行相應的提取、識別,并進行匹配與解釋操作,來實現重新建立起三維信息環境的目的。其過程包括如攝像機標定、立體匹配及三維圖像的重建等。通過展開對雙目立體視覺技術的深入與廣泛的研究與探討,讓人們對于多目視覺有非常重要的啟發的作用。在工業裝配、家用、公共服務用機器人的研究中,重點的問題所在即是需要解決視覺的定位問題,多目視覺非常好的解決了這一技術問題。本文研究了計算機立體視覺定位問題,以期建立起非常完善的機器人雙目立體視覺系統結構。
2 雙目立體視覺在機器人三維重定位中的方法研究
對于立體視覺的研究有了較大的進展,但對于實際應用的推廣方面還有很多需要改進的地方,仍不夠成熟。一方面是由于技術方面的原因,另一方面還是由于人類對于視覺機理的研究還不到位。因此對于人類視覺系統的研究一直在不斷的進行。目前主要包括的內容有:
2.1 攝像機標定
在立體視覺的研究中,攝像機標定是立體視覺研究的重要組成部分。由于在應用中的目標不同,對于攝像機標定技術也提出了非常多的要求。如果系統任務是相對于參考坐標系來的,那么保持一定的定位精度是非常重要的。根據不同的系統任務來做有效的匹配和識別。對有效的標定攝像機內外參數有非常有效的作用。
2.2 機器人立體視覺
機器人立體視覺是指機器人通過綜合的分析從不同的視覺點得到多幅圖像,并通過分析成像后形成三維的景物。在信息處理中,我們了解到在機器視覺系統中要,要解決的二個問題是其一是立體匹配的問題,一是三維重建的問題。
機器人雙目立體視覺系統的研究的重點問題即是立體匹配的問題。這是最重要也是最有難度的一個問題,由于立體場景中有受影響的因素諸多,如會受到光照條件的影響等。在研究中,由于研究對象的形狀的不同,物理特性的不同都會影響成像的形成。在技術的研究中要注重在各種復雜場景中的算法應用,提高匹配的能力 與抗干擾的能力,以降低實現的復雜程度和計算量,提高計算的精度。
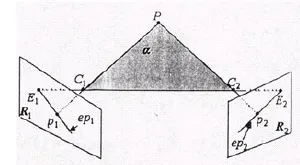
圖1 極線相關原理
在應用中,匹配準則作為一種規則,來實用來實現現實物理世界的固有屬性與所選匹配基元匹配過程中的規則。通過匹配原則的應用來有效的提高系統的計算效率,提高系統去除歧義的能力。在匹配性原則中,其中最為一般,最為基本的物理約束即是相容性約束和連續性約束原則。在基本約束的前期下,提出了對于景物處理的應用方面的要求及特點,以通過附加的一些先驗的知識來引申出一些特定的需要匹配控制的原則。
在匹配準則中的對于外極線約束的描述是在像平面(1R)上選定一點(1P),它在另一像平面(2R)上的對應點(2P)只有可能處于與之對應的極線(2EP)上。根據極線相關原理,最大程度的降低匹配的困難度并有效的提高計算的速度。
三維重建的最先決的條件即是要有效的建立起兩幅圖像的圖元中的相互的對應關系,要進行立體匹配。對于實際的立體圖像對,求解其對應問題極具挑戰性,可以說是立體視覺中最困難的一步。
2.3 雙目立體視覺
對于雙目立體視覺系統是利用機器人的關于距離的感知的技術,對人類的視覺系統進行有效的模擬。以實現靈活立體的測量景物的作用。這對于視覺生理及工程應用都有非常重要的意義。
2.4 攝像機定標
在應用中,通過對攝像機的定標來實現在實際應用中,攝像機的具體定位位置、攝像機的屬性的系列的參數以及建立成像模型的形狀,來確定在實際的空間坐標系中,物體點同它在圖像平面上像點之間的對應關系。在應用中,平等的雙視覺模型是理想的應用模型,有效的實現了極線與圖像掃描線的重合,進一步降低了立體匹配的復雜性。通過一般的旋轉和位移成像系統可以得到理想的模型。通過攝像機的定標方法可以得到詳盡的攝像機位置定位,通過調節光軸的方向及對焦距進行調整來實現對參數的調整,采用攝像機自定標方法確定三維空間點映射為二維圖像點的變換矩陣。
3 結語
在對機器人視覺系統進行研究中,最為關鍵的一個環節即是要對雙目立體成像模型進行系統的分析,并進行重點的研究。分析研究單目成像模型的基礎上,進一步分析研究平行的雙目成像模型的組成部分。在對立體成像模型進行研究與視差匹配后,再恢復三維的距離就會相對比較容易。對于距離測量精度有多種影響因素,包括數字量化效應、對各種特征的檢測與定位匹配的精度等各種因素。因此,要用正確方法來對距離的測量精度和定位精度進行精確的測試 。并采用適宜的方法,來設計較為合適宜的雙目立體視覺系統。在對雙目立體視覺系統進行設計時,要充分考慮各方面的各種因素,以確何在各個環節都有較高的精度。立體視覺是與心理、生理及物理、計算機等學科都有一定聯系的交叉學科,對于立體視覺系統的研究有著非常重要的理論意義與實用的意義,因此,進一步對人類視覺系統進行深入的研究,利用雙目立體視覺系統對機器人進行有效三維重建定位,有重要的意義。
[1] 雷成,吳福朝,胡占義,一種新的基于主動視覺系統的攝像機自定標方法.計算機學報,2000,23(上1)
[2] 楊長江,江威,胡占義,一種基于主動視覺的攝像機內參數自定標方法.計算機學報,1998,21(5)
Research methods in robot positioning of 3-D reconstruction of binocular stereo vision
Cao Kai
(Telecommunication College of Xi’an Technological University Shanxi Xi’an 710021)
This paper studies on the method of binocular stereo vision in robot positioning of 3-D reconstruction, and proposed the corresponding solution
Stereo vision; stereo matching; 3D reconstruction
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
