基于P MA C的步進電機伺服系統的P I D算法研究
2013-09-17 01:49:42張云鵬
電子工業專用設備 2013年11期
關鍵詞:系統
張云鵬
(中國電子科技集團公司第四十五研究所,北京 100176)
基于P MA C的步進電機伺服系統的P I D算法研究
張云鵬
(中國電子科技集團公司第四十五研究所,北京 100176)
闡述一種基于PMAC(Programmable Multi-Axis Controller)控制卡的步進電機構成的伺服系統PID(Proportion Integral Derivative)算法。詳細的介紹了系統的組成和工作原理,以及PID參數的調節原理和調節方法。我們借助PEW IN TUNING軟件,通過分析系統響應曲線,觀察系統的穩態特性和動態特性。
可編程多軸控制器;比例、積分、微分(PID);PID算法;伺服系統
在現代工程中,比例、積分、微分控制是一種應用的最為廣泛的調節器控制規律,簡稱PID控制,又稱PID調節。PID調節在工業生產過程中的應用自20世紀40年代至今已有70多年的歷史,無論結構,原理都十分簡單,穩定性好,可靠性高,參數調整方便,已經成為工業控制的主要技術之一。當我們無法正確掌握被控對象的結構和參數,又無法建立準確的數學模型時,其他的控制理論很難得以應用,這時最適合采用PID控制技術。PID調節器引入自整定,根據系統的誤差,利用P(比例),I(積分),D(微分)計算出控制量進行控制的。不僅如此,PID調節的魯棒性可以在一個很寬的范圍內變化,保證系統的穩定性,所以在目前得到廣泛的應用。但是隨著對控制系統的控制精度和響應速度要求的提高,傳統PID控制調節對日趨復雜的運行環境缺乏很好的適應性,還有傳動機構的擾動,負載的變化等因素的影響,很難得到令人滿意的結果。這時人們將PID和模擬自適應,前饋等相結合形成符合控制要求的控制方式。這種組合式的控制算法更能滿足各種實際情況的控制要求。本文將闡述一種基于PMAC控制卡的步進電機構成伺服系統的PID算法。
1 系統組成及算法
Deltu Tau Data System公司的可編程多軸運動控制卡Ⅱ型(PMAC2),是一個高性能伺服運動控制器,通過數字信號處理器(DSP),以及靈活的高級語言最多可控制八軸同時運動。PMAC2給多軸控制器提供前所未有的性價比,Motorola的DSP56002是PMAC2的CPU,處理所有八軸的計算。
我們的運動控制系統主要是由工控機,PMAC運動控制卡,步進電機驅動器,步進電機,編碼器和運動平臺組成。數據處理和驅動控制都由PMAC卡完成,驅動由德國的TRINAMIC步進電機驅動器及其配套電機組成,機械結構為X,Y,Z,θ四向運動平臺,反饋檢測器件是德國海德漢的旋轉編碼器。形成了一個由步進電機形成的伺服系統。機構框圖如圖1所示。
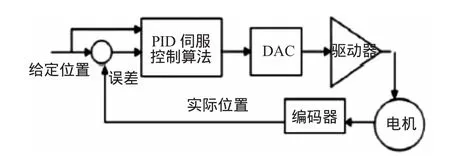
圖1 系統結構框圖
PID控制,又稱PID調節,就是根據系統的誤差,利用比例、積分、微分計算出控制量進行控制。模擬PID控制器的原理框圖如圖2所示,其中r(t)為系統給定值,c(t)為實際輸出,u(t)為控制量。調節PID的參數,可以實現在系統穩定的前提下,兼顧系統的帶載能力和抗干擾能力,同時在PID控制器中引入了積分項,系統增加了一個零積點,這樣系統階躍響應的穩態誤差為零。

圖2 模擬PID控制系統原理框圖
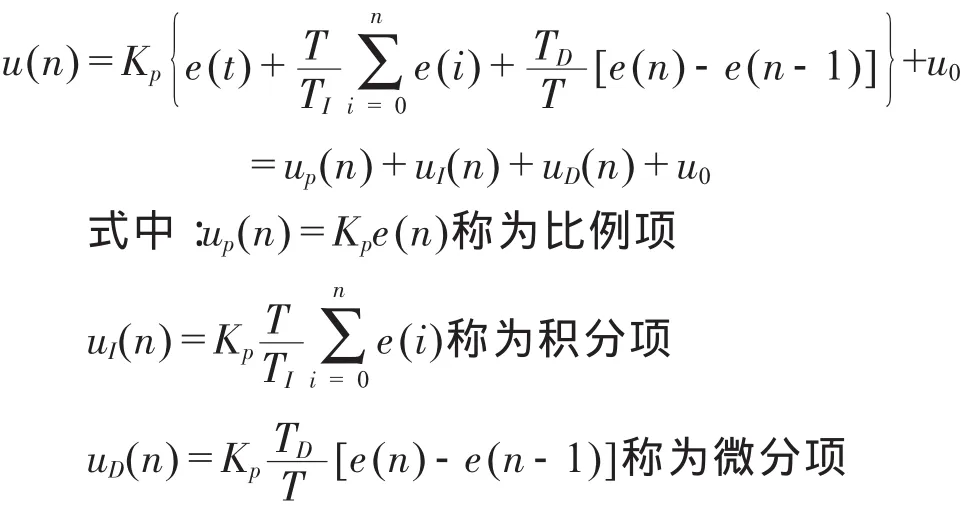
PID控制器的輸入輸出關系為:

式中:e(t)為系統偏差,e(t)=r(t)-c(t);
Kp為比例系數;
TI為積分時間常數;
Td為微分時間常數;
比例環節:即時成比例地反應控制系統的偏差信號e(t),偏差一旦產生,調節器立即產生控制作用以減小偏差。
積分環節:主要用于消除靜差,提高系統的無差度。積分作用的強弱取決于積分時間常數TI,TI越大,積分作用越弱,反之則越強。
微分環節:能反應偏差信號的變化趨勢(變化速率),并能在偏差信號的值變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減小調節時間。
目前PC控制系統中所使用的是數字PID控制器,是一種離散的采樣控制。通過將模擬PID表達式中的積分、微分運算用數值計算方法來逼近,便可實現數字PID控制。見表1。
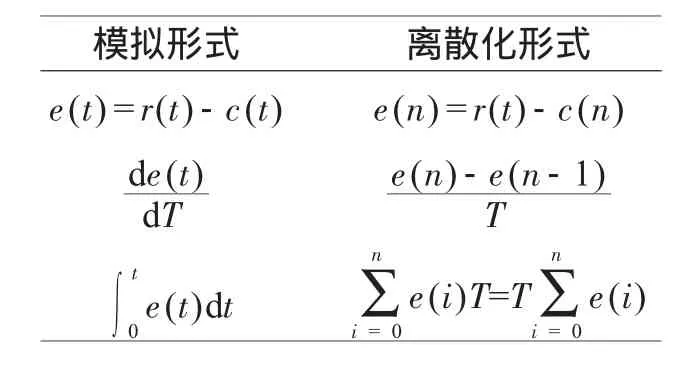
表1 模擬PID控制規律的離散化
數字PID控制器的差分方程:
目前數字PID控制器的控制算法通常可以分為位置式PID控制算法和增量式PID控制算法,但是僅有PID控制是遠遠不夠的,因為PID控制是一種反饋控制,既然是反饋控制就一定要有反饋信號,可是從反饋元件得到信號再同命令信號進行比較運算會造成延時。所以現在很多系統引進了前饋控制。采用前饋+反饋相結合的控制結構,既可以達到反饋控制對偏差的控制作用,也可以在干擾引起誤差前就對它進行補償,及時消除干擾的影響。PMAC為用戶提供了一個PID位置環伺服濾波器。即PID+速度/加速度前饋+NOTCH濾波的控制環算法。由于前饋調節器不改變系統的穩定性,只對被調量起到補償作用,因此PMAC卡PID控制加入了速度前饋調節和加速度前饋調節。加速度前饋可以補償被控對象自身慣性所產生的跟隨誤差。而速度前饋能減小微分增益或電機阻尼所引起的跟隨誤差。圖3為算法原理圖。
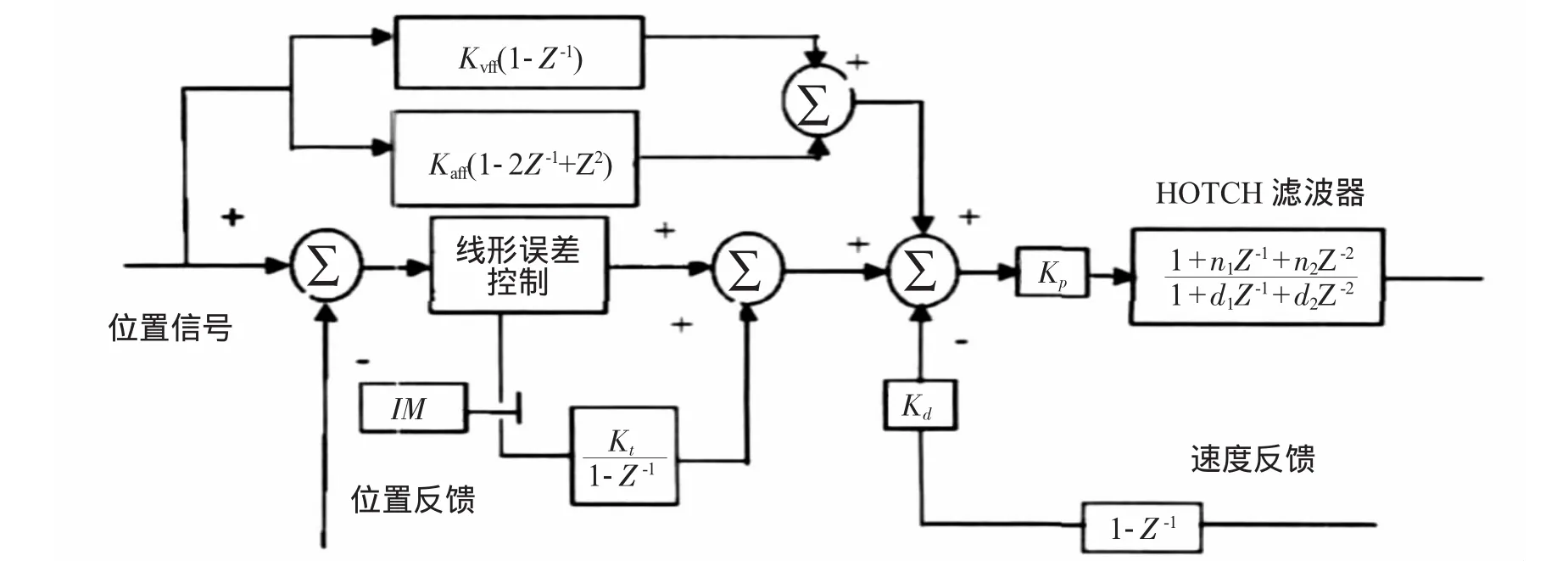
圖3 PID算法原理圖
從圖中我們可以看出,比例部分是誤差ek與比例系數kp的乘積;微分部分是誤差變化量ek
ek-1與微分系數kd的乘積;積分部分在采用了飽和限制后與積分系數ki相乘得到。系統的控制輸出是比例,微分,積分這三個部分的代數和,PID算法的實際公式為:

Dout(n)為16位的伺服周期輸出命令(-32768到+32767)。它被轉換成-10 V到+10 V的輸出。它的值由Ix69定義。
Ix08為電機的一個內部位置放大系數(通常設為 96)。
Ix09為電機速度環的一個內部放大系統。
F(n)是伺服周期n內所得的跟隨誤差,即為該周期內指令位置與實際位置的差值。
V(n)是伺服周期n內的實際速度,即為每個伺服周期最后兩個實際位置的差值。
C(n)是伺服周期n內的指令速度,即為每個伺服周期最后兩個指令位置的差值。
A(n)是伺服周期n內的指令加速度,每個伺服周期最后兩個指令速度的差值。
I(n)伺服周期n的跟隨誤差的積分,大小為:(在所有的伺服周期內積分都起作用。當CV不等于0時,Ix34=1只關掉了積分器的輸入,而沒有關掉它的輸出。)
2 PID參數調節與設定
通過PMAC卡為用戶提供的PEW IN TUNING軟件,可以對PID參數進行很方便的調節,進而獲得理想的控制性能。PEW IN TUNING為用戶提供了兩種調節方式,在界面工具欄中點AUTO是自動調節,在工具欄中點INTER是自動調節。自動調節很方便,無需用戶自己調節就可以根據運動情況自動獲得調節數據,但是只能用于剛性極好的系統,對于剛性較差的,比如傳動機構是皮帶傳動的系統,我們就需要用手動調節來獲取較好的PID參數。圖4為PMAC的PID調節界面。運行PEW IN軟件后,點擊工具菜單下的PMAC Tuning就會出現如圖所示的調節界面。
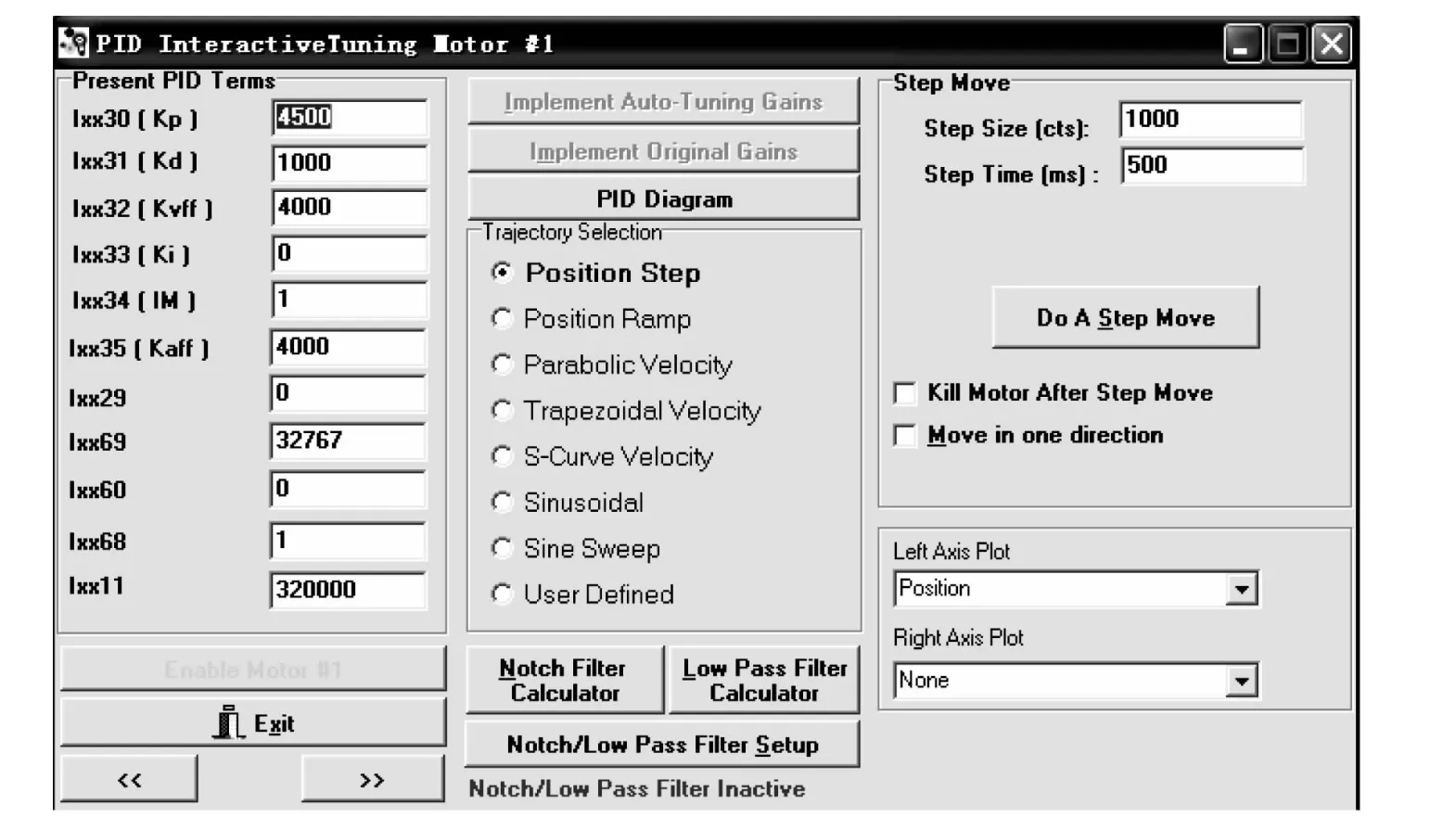
圖4 PMAC的PID調節界面
3 調整系統反饋增益
在線調試之前要先將I7mn0設成7,使編碼器與整個系統構成閉環系統,除此之外,還需要輸入ctrl+A指令,這樣電機就處于閉環狀態了。通過給步進電機一個階躍信號,觀察系統的響應,借助PEW IN TUNING軟件得出的曲線及系統性能指標,我們可以了解到系統的響應時間,穩態誤差,動態特性。
在軟件界面中,包含了主要PID參數:Ix30比例增益,Ix31微分增益,Ix33積分增益,Ix32速度前饋增益,Ix35加速度前饋增益。調節PID參數時,首先應該調P比例增益,即設Ix30比例增益為2000,Ix31微分增益為 0,Ix33積分增益為 0,Ix32速度增益為0,Ix35加速度增益為0。
點Position Step選項,在右邊點kill motor after step move選項,在Step move選項里使用默認值Step size(cts)為 1000,Step time(ms)為 500,然后點擊Do A Step Move按鈕,就會出現脈沖響應曲線。曲線1為指令信號,曲線2為實際位置響應。
從圖5中我們可以看出響應曲線的響應時間很長,系統響應緩慢,實際運動曲線和理想的運動曲線位置誤差很大,需要繼續調試。增大比例增益,其他指標均不變。
如圖6所示,當Ix30比例增益增大到8 000時,系統出現了明顯的震蕩,也有2.4%的超調,造成系統不穩定。雖然上升時間短,響應速度快,但依然不是我們想要得到的效果。
這時將比例增益降低到4 500時,可以看到系統的震蕩消失了,超調量為零。這時的Ix30比例增益參數基本滿足要求。
許多放大器接受從控制器送來的速度命令,和從電機傳送來的速度反饋信號通常由一個測速計或幾個旋轉變壓器得到。使用這些放大器的電機由放大器閉合他們的速度環,而不需要使用PMAC速度環的微分增益,所以我們在PMAC卡上可以不設置微分增益,Ix31設為0就可以了。
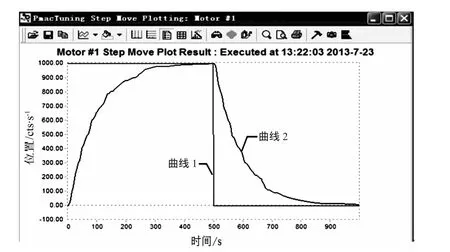
圖5 參數調節前系統階躍響應曲線
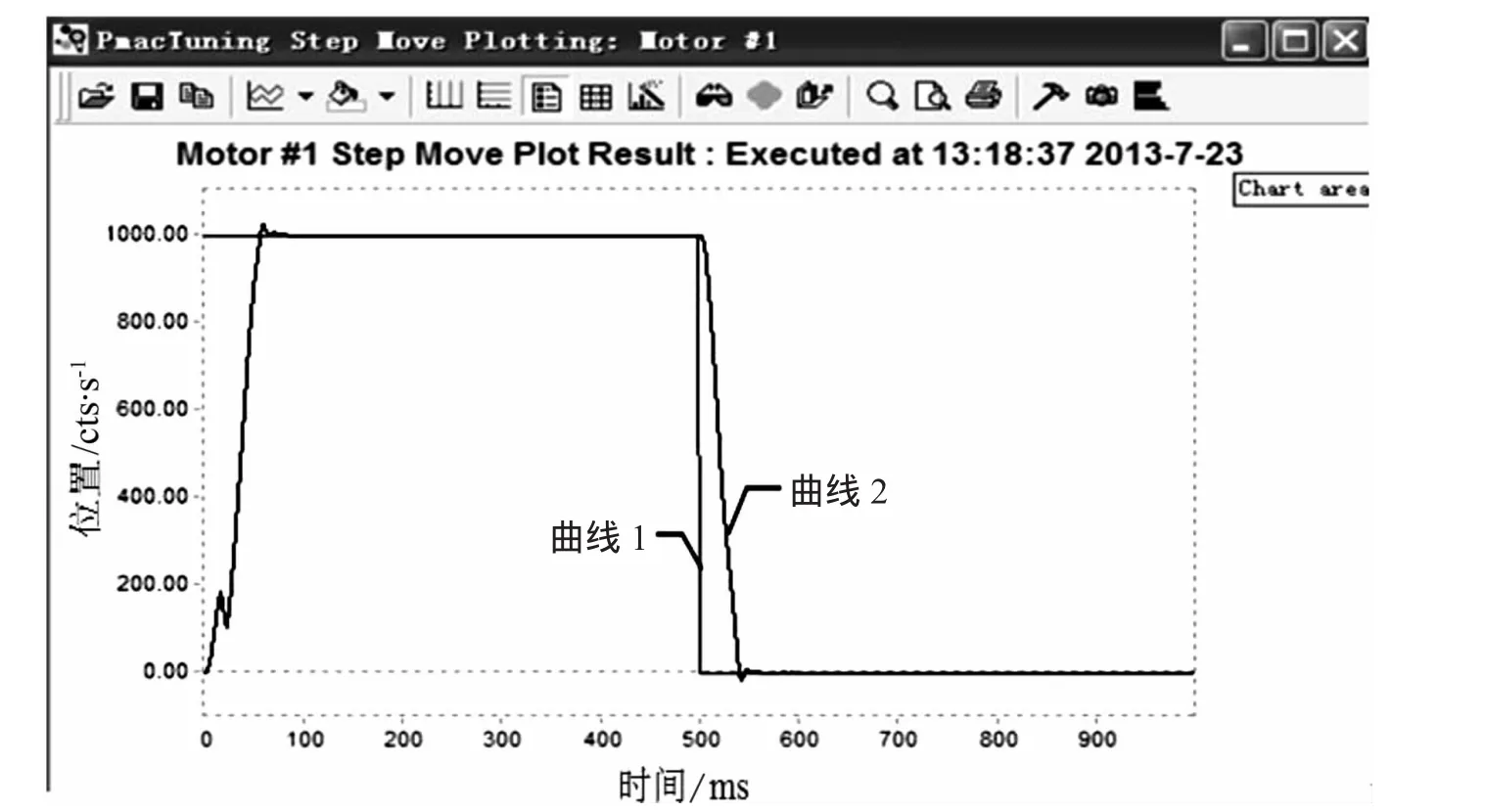
圖6 比例增益增大為8 000時的階躍響應曲線
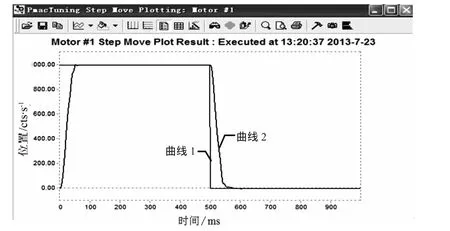
圖7 調節比例增益后的階躍響應曲線
速度模式放大器的優點關鍵是閉合模擬速度環,它們不受量化誤差和數字速度環采樣頻率的限制。這樣它們可獲得較高的速度環增益,剛性和抗干擾能力。由于這一點,它們可以在很大的切削力下保持精度被廣泛地用于機床切削。因為這些高增益,PMAC的位置環比例增益要比其它類型的放大器低得多。
PMAC卡的積分器有兩種方式可供選擇,由Ix34決定。當Ix34設為1時,積分器在全程都起作用,盡管可以減小跟隨誤差,但是當運動結束時會過沖,并且系統會不穩定。當Ix34為0時,積分器只在速度為零時起作用。由于PMAC可以調節速度前饋和加速度前饋,所以一般Ix34設為0。這是因為速度前饋和加速度前饋既可以有效的減小跟隨誤差,又不會損失系統的穩定性。
4 調整系統前饋參數
借助PEW IN TUNING軟件,我們可以通過觀察正弦曲線響應,調整速度前饋和加速度前饋,進而減小甚至消除系統跟隨誤差,調整系統的動態特性。打開PEW IN TUNING軟件后,點Parabolic velocity選項,在右邊點kill motor after step move選項,然后點擊Do A Step Move按鈕,就會出現正弦響應曲線。
前饋參數的調整方法和比例增益,積分增益的調整方法類似。先調整速度前饋,將Ix35加速度前饋設置為0,然后從零開始,逐步增加速度前饋。
圖8為前饋參數調整前的正弦響應曲線,可以看出跟隨誤差在170 cts(脈沖數),加大速度前饋,減小阻尼造成的跟隨誤差。
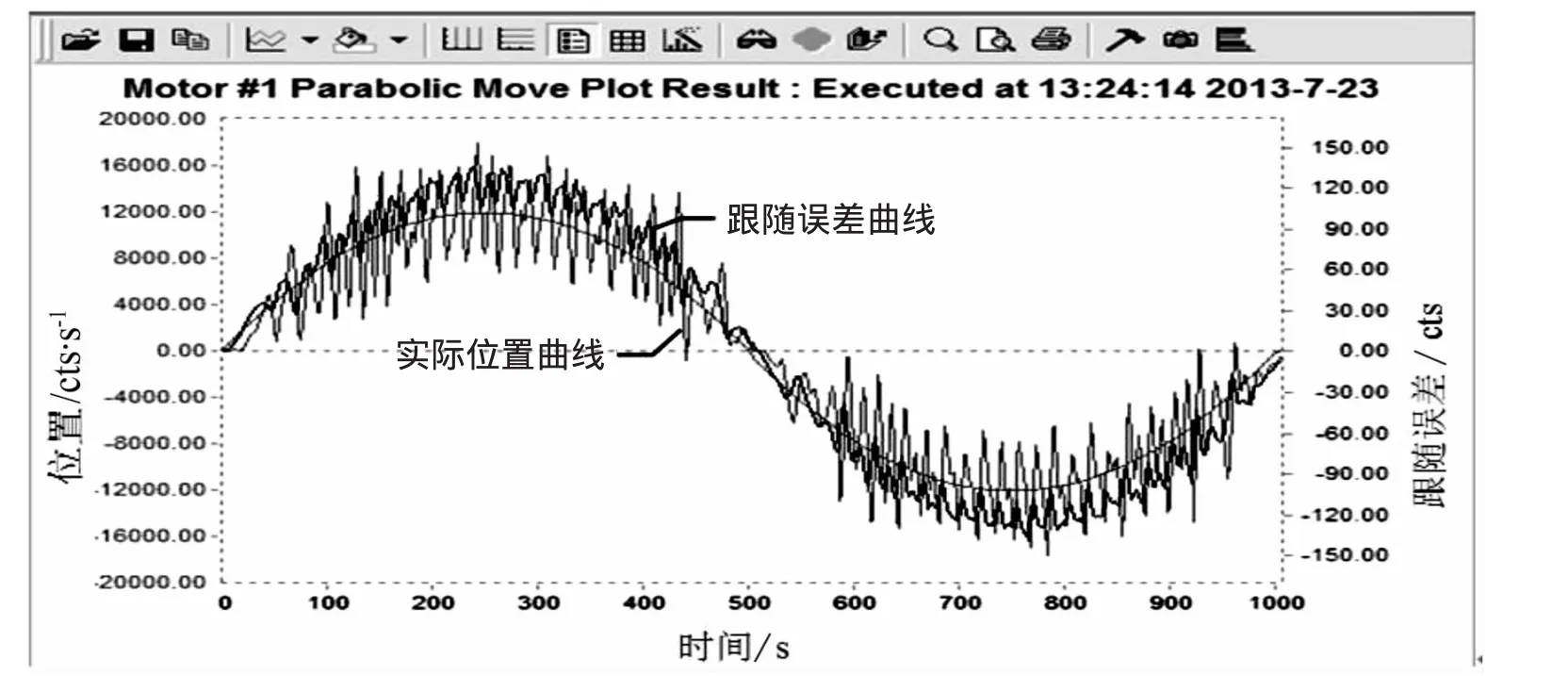
圖9 速度前饋Ix32設置為1 000時的正弦波響應曲線
圖9為速度前饋Ix32設置為1000時的正弦響應曲線,從圖中我們可以明顯看出跟隨誤差減小為120 cts。我們繼續調整,增大速度前饋。
當速度前饋增大到6 000時,速度跟隨誤差出現了反相的情況,這時的速度前饋過大了,我們應該適當的減小速度前饋。
經過一系列的調整,最終將速度前饋參數設置為4 000,這時的跟隨誤差最小。為了減小慣性造成的影響,下一步我們調整加速度前饋參數。
經過一系列的調整,最后將Ix32速度前饋增益設置為4 000,Ix35加速度前饋設置為4 000,得到跟隨誤差小且分布均勻的曲線,基本滿足使用要求。
圖10 速度前饋Ix32設置為6 000時的正弦波響應曲線
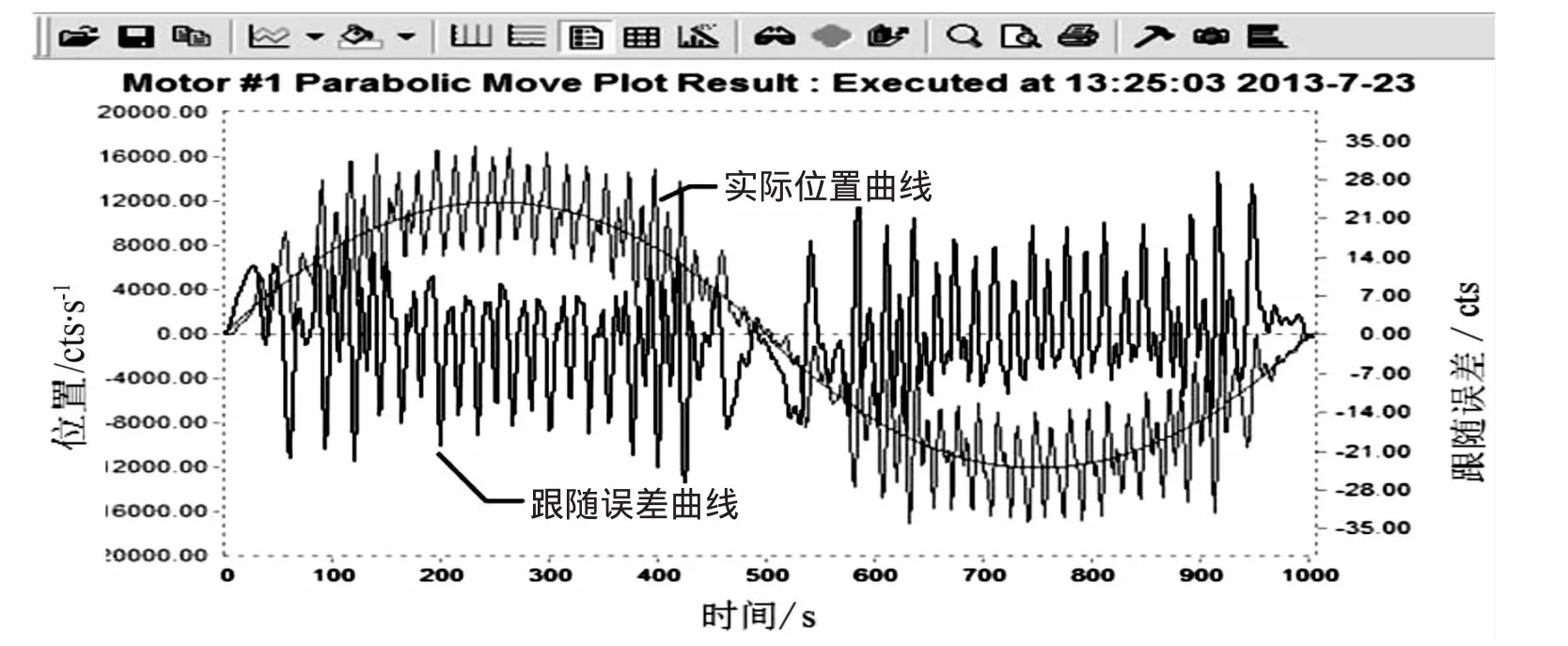
圖11 速度前饋Ix32設置為4000時的正弦波響應曲線

圖12 參數調節后的正弦波響應曲線
5 結束語
整個系統的響應速度,控制精度可以通過PID參數的整定得到很大的提高,通過這種調整,我們可以獲得良好的穩態性能和動態特性。借助PMAC提供的PEW IN TUING軟件,可以對系統各參數進行調整,并且可以直觀的看到各種調試曲線圖,最終完成PID參數調整,方便用戶使用。
:
[1]北京鈞義志成科技發展有限責任公司.PMAC用戶手冊[Z].
[2]田會峰,劉文杰.基于PMAC的直線電機PID研究[J].自動化技術與應用,2007,26(11):124-126.
[3]韓金恒,潘松峰,高菲,王磊.基于PMAC伺服系統的PID-前饋算法及其參數調節[J].自動控制,2008(5):105-106.
[4]朱立達,朱春霞,蔡光起.PID調節在PMAC運動控制器中的應用[J].控制與檢測.2007(2):50-53.
[5]霍罡.可編程序控制器模擬量及PID算法應用案例[M].北京:高等教育出版社.2008.
[6]PMAC/PMAC2 Software Reference Manual[Z].DELTA TAU Data Systems.Inc,2003.
[7]Tranquilla J M,Best S R.A study of the quadrifilar helix antenna for global positioning system(GPS)applications[J].IEEE Trans,AP-38,1990,38(10):1545-1550.
PID Algorithm Research on Step-up Electric Servo System Based on PMAC
ZHANG Yunpeng
(The 45thResearch Institute of CETC,Beijing 100176,China)
Abstract:This paper describes a PID(Proportion Integral Derivative)algorithm which apply to the servo system consisting of a PMAC(Programmable Multi-Axis Controller)control card and stepping motors,which specifies the composition and working principle of the system,and the adjustment principle and adjustment methodology of the PID parameter.PEWIN TUNING software is adopted to observe the static and dynamic characteristics by analyzing system response curve.
Keywords:Programmable multi-axis controller;Proportion integral derivative;PID algorithm;Servo system
2013-07-30
TM383.4
A
1004-4507(2013)11-0042-08
張云鵬(1985-)男,遼寧錦州人,助理工程師,工學學士,現主要從事半導體光刻設備的研究工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32