輸出耦合功率分流液壓混合動力系統控制策略
2013-09-17 12:10:28仝猛趙慧MonikaIVANTYSYNOVA
機床與液壓 2013年3期
仝猛,趙慧,Monika IVANTYSYNOVA
(1.武漢科技大學機械自動化學院,湖北武漢430081;2.普度大學Maha流體動力研究中心,拉法葉47905,美國)
隨著能源危機的加劇和環保問題日益嚴峻,對車輛燃油經濟性和排放性能有極大提高和改善的混合動力傳動技術逐漸引起了各國政府、研究機構及汽車制造商的高度重視,并得到越來越廣泛的應用。
制動能再生技術為混合動力汽車的一項關鍵節能技術,與蓄電池、飛輪和超級電容等幾種常用蓄能元件相比,液壓蓄能器具有高比功率、高循環效率、長時間儲能以及全充和全放能力強等特點[1]。因此,液壓混合動力技術得到日益廣泛的關注。
目前,世界各國研究開發的混合動力汽車根據動力系統的連接方式不同,可以分為串聯式、并聯式、混聯式3種組合方式[2]。國內科研機構對液壓混合動力的研究主要集中在串聯式和并聯式,混聯式技術則發展緩慢。
混聯式液壓混合動力也稱功率分流液壓混合動力,是串聯式系統和并聯式系統的綜合。它體現了串聯式和并聯式系統的優點,功率分流機構的引入,使傳動系統效率更高,可傳遞的功率也較大,并可實現系統的無級調速[2]。但相比于串聯式和并聯式系統,功率分流液壓混合動力系統結構和控制系統都更加復雜。因此,功率分流液壓混合動力系統工作模式的確定是對該類系統研究的基礎,能量管理策略是對該系統研究的重點和難點。
功率分流液壓混合動力傳動系統是以功率分流傳動系統為基礎,通過加入液壓蓄能器,實現制動能回收和再利用。功率分流傳動系統根據分流機構和匯流機構的不同有輸出耦合和輸入耦合等幾種基本結構形式[3-4],文中主要以輸出耦合功率分流液壓混合動力系統為例展開研究。首先在第1節中分析了輸出耦合功率分流傳動系統 (不含液壓蓄能器,不存在能量的回收與再利用)的組成、工作模式、功率流及控制策略,并以此為基礎,在第2節中進一步分析了輸出耦合功率分流液壓混合力傳動系統的工作模式及控制策略。
1 輸出耦合功率分流傳動系統分析
1.1 系統結構
圖1為輸出耦合功率分流傳動系統結構簡圖。圖中液壓元件1和元件2分別為變排量液壓泵/馬達。發動機輸出軸與行星排行星架相連,液壓元件1轉軸與行星排齒圈相連,液壓元件2轉軸與行星排太陽輪相連,行星排太陽輪通過主減速器與車輛驅動軸相連[3]。圖中功率分流機構為內外嚙合單行星排,功率匯流機構為固定軸齒輪,發動機輸出功率被行星齒輪排分為兩路,一路直接由機械軸傳遞,一路由液壓系統傳遞,而后再由固定軸齒輪耦合傳遞至車輛驅動軸。
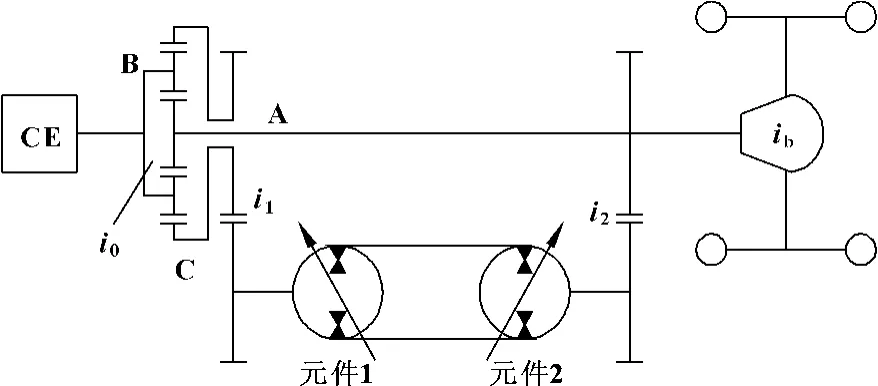
圖1 功率分流傳動系統結構簡圖
1.2 單行星排工作模式分析
輸出耦合式功率分流傳動系統中分流機構單行星排的結構如圖2(a)所示,單行星排由太陽輪A、行星架B、齒圈C 3個元件組成,各元件之間的轉速特性與轉矩特性方程式如下[5]:
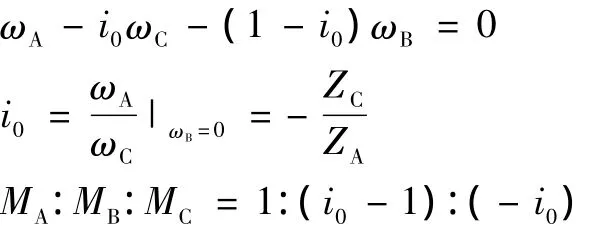
式中:ωA、ωB、ωC為行星排三元件旋轉角速度,rad/s;
MA、MB、MC為行星排三元件轉矩,N/m;
i0為行星排結構傳動比;
ZA、ZB、ZC為行星排三元件齒數。
因行星排結構傳動比i0為負值,可知太陽輪與齒圈轉矩方向相同,行星架轉矩方向與其相反。
單行星排三元件轉速方向可用圖解法來確定,3個速度向量起點在同一條垂線上,終點可用直線連接[5]。如圖 2(b)所示。
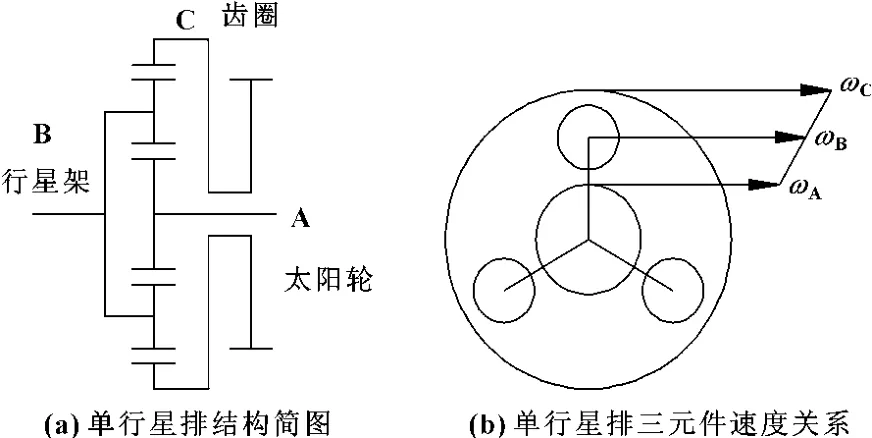
圖2 單行星排結構與轉向示意圖
現假設發動機轉速確定,可知行星排行星架B轉速ωB確定,定義發動機轉速為正,發動機輸出轉矩為正,即行星排行星架轉速與輸入轉矩為正,功率通過行星架輸入行星排。
根據車輛在不同工況下的行駛速度要求和行星排特性,分析行星排的工作模式如下:
(1)車輛倒車
行星排太陽輪與行星架轉向相反,而齒圈與行星架轉向相同。太陽輪轉向與轉矩同為負,轉矩與轉速方向相同,輸入功率;而齒圈轉速為正,轉矩為負,轉速與轉矩方向相反,輸出功率。
(2)車輛怠速
太陽輪轉速為零,無功率流;齒圈與行星架轉向相同,齒圈轉速與轉矩方向相反,輸出功率。
(3)車輛起步加速
太陽輪轉速由零逐漸增大,其轉速與轉矩方向相反,輸出功率;而齒圈轉速逐漸減小,其轉速與轉矩方向亦相反,輸出功率。
(4)全機械工作點
當車速增加到一個確定速度時,齒圈轉速減小為零,無功率流。此時太陽輪依然輸出功率,定義此時車速為全機械工作點速度 (vm)。
(5)車輛正向加速
車輛繼續加速,太陽輪速度持續增加,直到太陽輪速度達到最大,此過程中太陽輪依然輸出功率;而齒圈轉速負方向增加,其轉速與轉矩方向相同,輸入功率。
綜上,輸出耦合功率分流傳動系統中單行星排的工作模式和三元件的轉速、扭矩、功率流方向如表1所示。

表1 單行星排三元件工作模式
1.3 系統工作模式及控制策略
行星排是2自由度機構,必須有兩個約束才能確定其動作。行星架由發動機控制其轉速,假設發動機輸出轉速確定,則行星架轉速可確定,此為行星排提供第一個約束;太陽輪與齒圈通過液壓系統相連,由兩個液壓泵/馬達之間的傳動比來決定太陽輪、齒圈的轉速關系,此傳動比為行星排提供第二個約束。由以上分析可知車輛速度可由液壓系統的傳動比控制,而該傳動比是通過調節兩泵/馬達的排量來控制,即可用期望車速做為泵/馬達排量控制輸入信號來實現車速控制。
定義V表示液壓元件排量,Vmax表示泵/馬達的最大排量,ε=V/Vmax表示變量泵/馬達的相對變量率,則ε滿足-1≤ε≤1。當ε=0時,泵/馬達排量為零,當ε=-1或ε=1時,泵/馬達排量最大。設液壓元件1與液壓元件2之間的傳動比為iy,則iy∝ε2/ε1。
結合行星排工作模式來確定傳動系統工作模式及車輛速度控制策略如下:
(1)車輛倒車
車輛倒車時行星排太陽輪轉速與齒圈轉速相反,因此iy小于零,則ε2/ε1<0。車輛車速從零至倒車最大速度的變化過程中,太陽輪、齒圈轉速增大,但齒圈轉速變化率大于太陽輪。可得iy絕對值減小,此時ε1負向增大可實現車速要求。
(2)車輛怠速
車輛怠速時,太陽輪轉速為零,齒圈轉速為正。液壓系統傳動比iy為無窮大,則ε2/ε1無窮大,此時ε1=0,ε2=1可實現車速要求。
(3)車輛起步加速 (v<vm)
車輛起步加速,太陽輪轉速正向增大,齒圈轉速正向減小。iy從無窮大逐漸減小,則ε2/ε1>0,此時ε2正向減小或ε1正向增大可實現車速要求。
(4)全機械工作點 (v=vm)
當太陽輪轉速增大到一個確定值,齒圈轉速減小到零時,液壓元件1轉速為零,液壓系統不再傳遞功率,達到系統全機械工作點。傳動比iy減小至零,則ε2/ε1=0,此時ε2=0,ε1=1可實現車速要求。
(5)車輛正向加速 (v>vm)
若要求車速繼續增加,即太陽輪轉速繼續增加,則需齒圈轉速負方向增加。可知傳動比iy小于零,且絕對值增大。此時ε2負向增大可實現車速要求。
通過對車輛不同行駛工況下液壓元件1、2排量變化的分析,再考慮到液壓元件排量調節的連續性,可確定液壓元件排量的調節方式隨期望車速的變化曲線如圖3所示。
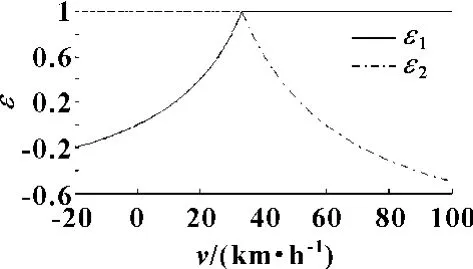
圖3 液壓元件排量調節曲線
通過上述分析,可確定輸出耦合功率分流傳動系統的速度控制策略為:在不同的期望車速范圍內,依據圖3所示車速與液壓元件排量的關系,分別調節液壓元件1、2的排量,以實現期望車速。這種控制方法稱為順序控制模式。系統控制方框圖如圖4所示。
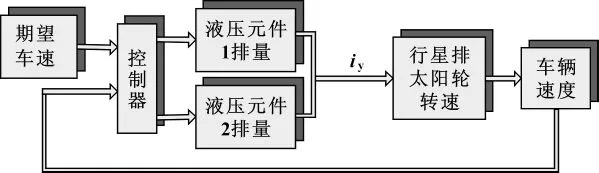
圖4 功率分流傳動系統控制方框圖
1.4 系統功率流分析
根據上述對行星排功率流方向的分析,可得出輸出耦合式功率分流傳動系統的功率流程,如圖5所示。
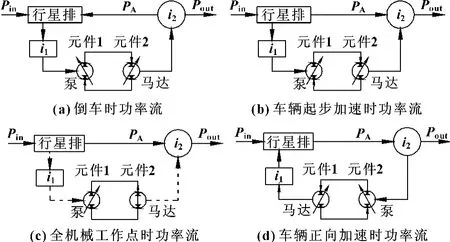
圖5 功率分流傳動系統功率流圖
車輛倒車時系統輸入功率通過液壓通道傳遞至輸出端,但有部分功率通過機械通道流回輸入端,如圖5(a)所示;車輛正向前進過程中共有3種功率流模式,車速小于全機械工作點車速時系統輸入功率通過液壓、機械兩個通道傳遞至輸出端,如圖5(b)所示;車輛在全機械工作點時系統輸入功率只通過機械通道傳遞至輸出端,如圖5(c)所示;當車速大于全機械工作點車速時,輸入功率通過機械通道傳遞至輸出端,有部分功率通過液壓通道流回輸入端,如圖5(d)所示。
2 輸出耦合功率分流液壓混合動力傳動系統分析
輸出耦合功率分流液壓混合動力傳動系統結構如圖6所示,系統中蓄能器用于能量的回收與儲存。在機械結構上,該系統與輸出耦合功率分流傳動系統完全相同。在液壓系統方面,輸出耦合功率分流液壓混合動力傳動系統包含一個高壓蓄能器和一個低壓蓄能器。高低壓蓄能器分別連接在油路A和油路B上。利用液壓閥來控制蓄能器與液壓回路的通斷。

圖6 輸出耦合功率分流液壓混合動力傳動系統結構簡圖
為了提高效率,減少排量,要盡可能地回收制動能量,用于驅動汽車起步加速。相比于輸出耦合功率分流傳動系統,輸出耦合功率分流液壓混合動力傳動系統為了實現能量的回收和再利用,必須使用更復雜的控制策略,以實現系統更多的工作模式[6-7]。
(1)車輛起步
車輛起步過程發動機處于高油耗工況,如果采用蓄能器驅動車輛起步,當車速達到一定速度 (va)后,再關閉蓄能器由發動機驅動車輛,這樣則可節省燃油,提高燃油利用率。在這種工作模式中高壓蓄能器內壓力必須保持在一定壓力 (ps)之上,以確保液壓元件2能夠輸出足夠大的轉矩驅動汽車加速。在此工作模式下系統的功率流如圖7所示。

圖7 蓄能器驅動模式系統功率流圖
液壓元件1的排量由車速及高壓蓄能器壓力控制,即車速小于va、高壓蓄能器壓力大于ps時液壓元件1的排量為零,發動機空轉,由蓄能器驅動車輛。液壓元件2的排量由期望車輛牽引力和高壓蓄能器壓力控制,以確保液壓元件2能提供足夠轉矩。
(2)發動機驅動模式
如果車輛以一定的速度行駛,或者加速過程中車速大于va或高壓蓄能器壓力小于ps時,蓄能器系統關閉,車輛完全由發動機驅動。此時,輸出耦合功率分流液壓混合動力傳動系統與輸出耦合功率分流傳動系統工作模式和控制策略完全相同。
(3)再生制動模式
在車輛剎車時,液壓元件2必須以泵模式工作,為驅動軸提供一個負轉矩,液壓元件1的排量為零。系統功率流如圖8所示。從液壓元件2流出的高壓油將為高壓蓄能器充能,實現對剎車能的回收、儲存。液壓元件2的排量及其輸出的轉矩由期望車速控制。高壓蓄能器充滿后高壓油將通過溢流閥流入低壓蓄能器。此時沒有能量傳遞至液壓元件1或發動機。考慮到安全性能和車輛緊急制動的情況,系統應該加入附加制動器。

圖8 再生制動模式系統功率流
綜上所述,混合動力傳動系統控制策略的關鍵問題是在不同車輛行駛工況下對兩種動力源的選擇。輸出耦合功率分流液壓混合動力傳動系統以期望車速作為控制輸入信號,并實時監控高壓蓄能器的儲能狀態和實際車速,作為能源選擇的依據。在起步加速時,若高壓蓄能器內壓力大于ps,用蓄能器驅動車輛。此時液壓元件1排量為零,發動機空轉。當蓄能器中壓力小于ps或車速達到一定速度 (va)時關閉蓄能器,由發動機驅動車輛,使用順序控制策略,控制流程如圖9(a)所示。車輛倒車時的控制策略與起步加速相同。車輛剎車時,可根據實際情況判斷是否需要緊急制動。非緊急制動時采用能量再生制動,回收車輛動能儲存于蓄能器中,緊急制動時采用摩擦制動器制動,控制流程如圖9(b)所示。
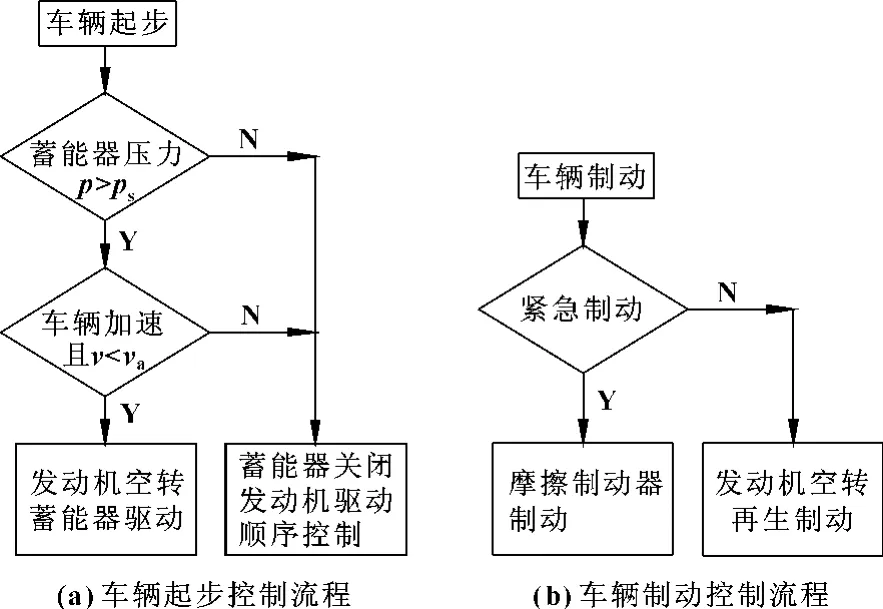
圖9 輸出耦合功率分流液壓混合動力傳動系統控制流程圖
3 總結
以輸出耦合功率分流傳動系統為基礎,分別分析了該傳動系統在車輛倒車、怠速、起步加速、全機械工作點、正向加速等不同工況下的工作模式、功率流特性,提出了針對該系統的順序控制策略。并以此為基礎,分析了輸出耦合功率分流液壓混合動力傳動系統的結構、工作模式,初步探討了兩種能源的選擇方法和控制方法,提出了針對輸出耦合功率分流液壓混合動力傳動系統的控制流程,使該系統能夠綜合串聯式和并聯式系統的優點,更好地實現車輛排放和燃油消耗的控制目標。
【1】蘇欣平,肖匯,楊鋼,等.混合動力汽車的效率分析及發展趨勢[J].機床與液壓,2011,39(20):57 -58.
【2】杜玖玉,苑士華,魏超,等.車輛液壓混合動力傳動技術發展及應用前景[J].機床與液壓,2009,37(2):181-184.
【3】CARL Blake.Hydraulic Power Split Continuously Variable Transmissions For Heavy Duty Truck Applications[D].Purdue University,2007:4 -11,15 -20.
【4】WILLIAME Kyle.Energy Recovery For Hydraulic Input Coupled Power Split Drives[D].Purdue University,2007:13-29.
【5】劉修驥.車輛傳動系統分析[M].國防工業出版社,1998:49 -51,70 -73.
【6】趙克剛,羅玉濤.一種液壓儲能汽車的混聯式新方案[J].液壓與氣動,2007(4):18 -21.
【7】杜玖玉,苑士華,胡紀濱,等.新型車用功率分流式液壓混合動力傳動研究[J].液壓與氣動,2008(8):22-25.
