改進的模糊Smith串級主汽溫控制仿真研究
2013-09-19 06:39:16劉長良張永波
電力科學與工程 2013年8期
劉長良,張永波
(1.華北電力大學 新能源電力系統國家重點實驗室,北京 100085;2.華北電力大學 控制與計算機工程學院,河北 保定 071003)
0 引言
火電廠鍋爐過熱蒸汽出口溫度 (主汽溫)是鍋爐的重要參數之一,其對電廠的安全經濟運行具有重要意義[1]。主汽溫允許變化的范圍一般為額定汽溫的 +5~-10℃[2],汽溫過高或過低,以及大幅度的波動都將嚴重影響鍋爐、汽輪機的安全和經濟運行[3],因此需要將主汽溫控制在允許的范圍之內。
火電廠的主汽溫被控對象具有非線性,時變性和滯后性等特點,而且其動態特性易受環境的影響,難以確立精確的數學模型[4],這使得常規的PID串級控制往往不能取得滿意的控制性能[5]。在解決大慣性、大遲延問題方面,Smith預估是一種比較有效的控制方法[6],但是它對被控對象的參數變化非常敏感,一般當過程參數變化10%~15%時,Smith預估補償就失去了良好的控制效果[7]。C.C.Hang 提出的改進型 Smith 預估器[8]可以有效地改善傳統Smith預估器的適應性。本文利用這種改進方法,結合模糊控制系統良好的不確定性、非線性的控制性能,提出了一種基于Smith預估的模糊PID主汽溫控制系統。
1 主汽溫控制系統結構
主汽溫控制系統采用串級控制,通過改變減溫水閥門開度來改變減溫水量,從而調節主汽溫度。由于常規PID溫度控制器難以適應汽溫控制系統的動態變化特性,常規Smith預估控制對于大時滯對象具有較好的控制效果,但是主汽溫對象的時變性使得一般的Smith預估難以在實際應用中得到理想的控制效果。因此本文采用一種改進型Smith預估,同時為了提高控制系統的魯棒性,主控制器采用模糊規則在線調整PID參數,從而消除模型參數變化對系統的影響。本文設計的串級控制系統結構如圖1所示。

圖1 模糊Smith串級系統結構Fig.1 The structure of fuzzy Smith cascade system
在串級控制系統中,內環對控制精度要求較低,用來迅速消除內環的擾動,故內環的副控制器C1(x)為PI控制器;主控制器采用模糊控制器,用來克服參數變化對系統的影響,G1(s),G2(s)分別為導前區和惰性區的傳遞函數,H1(s),H2(s)分別為導前汽溫和主汽溫的測量單元特性,r為主汽溫的設定輸入值,y為過熱器出口溫度實際值,d1,d2為系統擾動輸入等效值,它們分別對應于減溫水自發內擾和燃燒率變化等外擾。串級控制系統的外環主控制器采用模糊控制,并采用Smith預估器對整個系統的純滯后進行補償,來減小純滯后系統的超調,增強系統的穩定性。
經推導可得出主控制器的廣義被控對象Gp(s)為
為了在外環采用Smith預估,主控制器后的部分可等效為一個整體的被控對象,可將其等效為一階純滯后環節:

式中:Km,Tm,τm分別為對象參考模型的過程增益、時間常數和純滯后時間。
2 基于Smith預估的模糊PID串級主汽溫控制系統
2.1 改進的Smith預估控制
Smith預估控制的基本原理是通過被控對象的動態特性,利用預估模型進行補償,使被控量超前反饋到控制器,使調節器提前動作,從而有效地改善大時滯控制系統的動態性能。Smith預估控制原理如圖2所示。

圖2 Smith預估控制原理Fig.2 The theory of Smith predictive control
圖2中被控對象傳遞函數為Gp(s)e-τps,τ為時滯時間常數,Gm(s)為對象模型中不含時滯部分的傳遞函數,e-τms為對象模型時滯部分,當模型準確時,即 Gp(s)e-τps=Gm(s)e-τms時,經Smith預估補償后的閉環傳遞函數為:

此時在系統的特征方程中已不包含e-τs項,說明系統已經消除了純滯后對系統控制品質的影響,只是響應在時間坐標上向后推遲了一個e-τs時間。
但是,Smith預估控制存在著一個很大的缺點:非常依賴于精確的數學模型和對外部擾動十分敏感,魯棒性較差,為此C.C.Hang提出了一種改進型Smith預估器,它比原方案多了一個調節器,其方框圖如圖3所示。
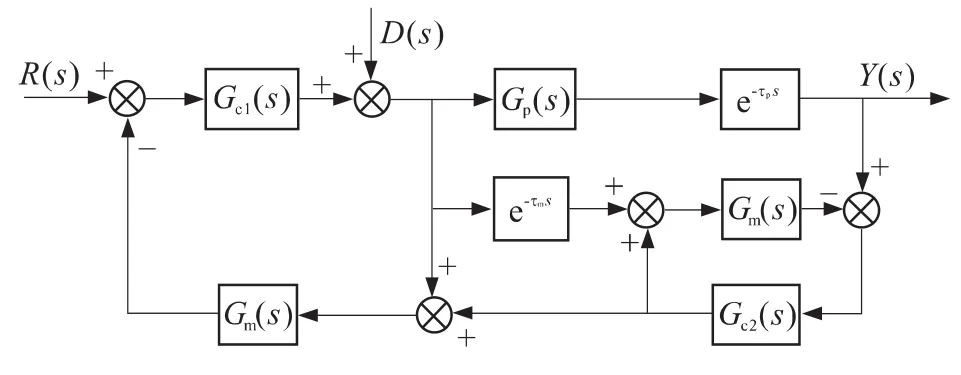
圖3 改進型Smith預估控制Fig.3 Improved Smith predictor
改進型Smith預估多了一個調節器Gc2(s),一般采用PI調節,它與Smith補償器方案的區別在于主反饋回路,其反饋通道傳遞函數不是1,而是Gf(s),即

由圖可推導出此系統的傳遞函數為:

由上式可知,當Gp(s)=Gm(s),τp=τm時,系統得到完全補償,而當Gp(s)≠Gm(s)或τp≠τm時,只要Gc2(s)的PI參數選擇的合適,系統能夠克服過程動態參數變化的不利影響。輔助調節器Gc2(s)的整定似乎要復雜一些,但經分析發現,輔助調節器是在反饋通道上,且與模型傳遞函數Gm(s)一起構成了Gf(s)。如果假設Gm(s)是一階環節,且設TI2=Tm,即,使調節器的積分時間等于模型的時間常數,則Gf(s)可以簡化為

因此改進型Smith預估控制方案也可用圖4表示。

圖4 改進型Smith預估控制Fig.4 Improved Smith predictor
這樣,反饋回路上出現了一個一階濾波器[9],使被控對象的輸出和預估器的輸出之間的偏差經過一階慣性環節的濾波后才反饋到控制器,這就減緩了誤差干擾系統的速度,削弱了模型不匹配對系統的影響,有利于系統穩定。此改進方法只有一個整定參數Tf,實質上只有Gc2(s)中的比例增益Kc2需要整定,它是比較容易在線調整的。文獻[4]經過分析比較廣義被控對象時間常數T0和純滯后時間τ0變化時的ITAE積分綜合指標,證明了時間常數T0和純滯后時間τ0在較寬的范圍變化時,這種改進型Smith預估控制仍有較強的適應性,對具有純滯后的過程控制具有工業實用價值。
2.2 外環主控制器設計
主回路的控制對象為溫度控制,容量滯后大,對超調量和靜態誤差要求都較高,故主控制器選用PID控制[10],為提高系統對模型參數變化的適應能力,采用模糊規則對PID參數進行調整,模糊控制是以模糊集合論、模糊語言變量及模糊邏輯推理為基礎的計算機智能控制,模糊控制具有較強的魯棒性,對控制對象參數變化不敏感,有較強的抗干擾性,它不依賴于系統精確的數學模型,特別適合系統復雜且要求控制精確的系統中應用。本設計利用模糊規則,在PID初值基礎上通過自調整參數,改善系統動態性能[11]。基于模糊控制的外環主控制器結構如圖5所示。

圖5 基于Smith預估的模糊PID控制器Fig.5 Fuzzy PID compound control system
本模糊控制器以偏差和偏差變化率的絕對值|e|和|ec|為輸入語言變量,以 ΔKp,ΔKi,ΔKd為輸出語言變量,以輸入、輸出的語言變量的語言值均為 4個:B(大),M(中),S(小),ZO(零),各模糊變量隸屬函數均選用三角形,離散論域均為[0,1,2,3]。
利用模糊控制規則,可以比較容易地實現對PID控制器參數的在線調整,模糊控制設計的核心是總結技術知識和實際操作經驗,建立合適的模糊規則表,得到針對3個參數ΔKp,ΔKi,ΔKd分別整定的模糊控制表。通過積累大量操作經驗知道,ΔKp,ΔKi,ΔKd3個參數與輸入控制器的偏差e、偏差變化率ec之間,存在著一種非線性關系。這些關系雖然無法用清晰的數學表達式描述,卻可以用模糊語言表述。
在PID控制系統中,積分環節主要用于消除靜差,提高系統的無差度,但是積分作用過強會造成系統超調增大,甚至引起振蕩;比例環節用來加快系統的響應速度,提高調解精度,比例作用過大同樣會引起系統不穩定;微分環節反應偏差信號的變化趨勢,能在偏差信號值變得太大之前加入一個修正信號,加快系統的響應速度,減少超調時間,但它對干擾信號同樣敏感,會使系統抑制干擾的能力下降。通過多次操作經驗總結并結合理論分析可以歸納出偏差e、偏差變化率ec跟PID的 3個參數 ΔKp,ΔKi,ΔKd間存在如下關系:
(1)當|e(t)|較大時,為加快系統的響應速度,應取較大的Kp;為避免系統在開始時可能引起的超范圍控制作用,應取較小的Kd;為避免出現較大的超調,應使Ki盡可能小。
(2)當|e(t)|處于中等大小時,應取較小的Kp,使系統的超調減小;此時Kd的取值對系統較為關鍵,為保證系統的響應速度,Kd要取值恰當;此時可適當增加一點Ki,但不得過大。
(3)當|e(t)|較小時,為使系統具有良好的穩態性能,可取較大的Kp和Ki;為避免系統在平衡點振蕩,Kd的取值應恰當。
基于上述總結的輸入變量e與Kp,Ki,Kd的定性關系,考慮偏差變化率ec的影響,可得模糊控制規則,如表1、表2、表3所示。

表1 Kp的模糊控制規則Tab.1 Fuzzy control rules of Kp
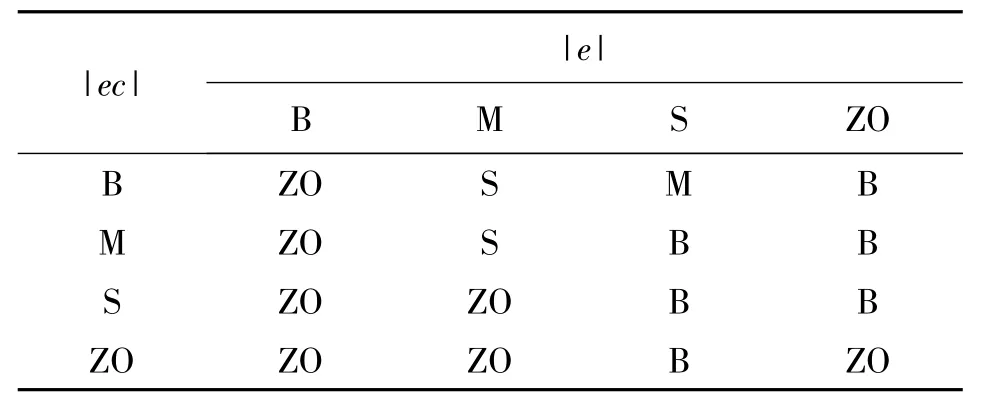
表2 Ki的模糊控制規則Tab.2 Fuzzy control rules of Ki

表3 Kd的模糊控制規則Tab.3 Fuzzy control rules of Kd
對輸入的偏差e和偏差變化ec,取得相應的語言值后,根據模糊規則表,經過查表模糊決策,采用Mamdani模糊推理方法,分別得到3個修正值的模糊量,然后采用加權平均法求取輸出量的精確值,再乘以比例因子,得出對原PID參數的修正值 ΔKp,ΔKi,ΔKd,系統實時的參數取值應該分別為 Kp+ΔKp,Ki+ΔKi,Kd+ΔKd。
3 控制系統仿真研究
設某鍋爐在某種工況下,過熱汽溫對減溫水量的動態特性為[12]

測量單元特性為

為檢驗所設計的控制系統的控制品質和魯棒性,將本文設計的控制系統運用Matlab軟件進行仿真分析,并與常規的串級PID串級控制系統進行仿真比較。
3.1 正常情況
對仿真模型施加單位階躍信號,兩種控制方法的響應曲線如圖6。

圖6 階躍響應曲線Fig.6 Simulation result of step response
由圖6可看出,與常規串級控制相比,采用Smith預估的模糊控制過渡過程短,超調量小,能夠較好地解決大遲延問題。
3.2 加入擾動的情況
在常規串級控制和模糊Smith串級控制的內環加入一個減溫水擾動信號 (d1=0.2),該擾動信號在時間400 s時加入;在減溫水擾動的基礎上,在時間700 s時加入燃燒率變化擾動 (d2=0.2),此時系統的輸出曲線如圖7。

圖7 加入擾動時響應曲線Fig.7 Simulation curve of disturbance response
3.3 系統工況變化的情況
主汽溫對象數學模型會隨機組負荷的變化而變化,現場的許多原因也都會改變主汽溫數學模型,如過熱器管道的積灰結垢等,這就需要系統具有很強的魯棒性,本文分別針對惰性區傳遞函數慣性增大和增益增大兩種情況進行仿真。圖8為惰性區慣性增大的響應曲線,Tm由25變為35,G2(s)=1.125/(35s+1)3。圖 9為增益由1.125變為1.5的響應曲線,G(s)=1.5/(25s+1)3。
正常情況和模型參數變化時兩種控制方法的性能指標如表4、表5、表6所示。
通過仿真曲線比較可看出,本文設計的基于改進的Smith預估模糊PID串級控制系統在正常工況、加入擾動及工況變化的情況下控制效果均優于常規的串級控制。特別是當工況發生改變時,新的串級控制系統在超調量、調節時間、衰減率等性能指標都比較理想,可見改進的Smith可以改善傳統Smith預估對系統模型精度要求高的缺點,在模型參數發生變化時仍能保證一定的控制品質,從而提高系統的魯棒性。

圖8 惰性區慣性增大時響應曲線Fig.8 Simulation curve of gain increasing

圖9 惰性區增益增大時響應曲線Fig.9 Simulation curve of inertia increasing

表4 正常情況時性能指標Tab.4 Performance of nomal condition

表5 惰性區慣性增大時性能指標Tab.5 Performance of gain increasing

表6 惰性區增益增大時性能指標Tab.6 Performance of inertia increasing
4 結論
本文針對電廠主汽溫控制對象特點,在傳統串級控制的基礎上,運用Smith預估和模糊PID控制實現對主汽溫的控制。改進的Smith預估器可以有效提高系統的適應能力和魯棒性,從而更適用于工況不斷變化的實際情況。主控制器運用模糊控制的原理實現對PID參數的修正,進一步提高了系統模型參數變化時的適應能力。通過仿真結果可以看出,這種方法對于電廠主汽溫等缺乏精確數學模型和參數變化的大遲延工業過程具有較大的應用價值。
[1]黃宇,韓璞,李永玲.主汽溫系統模糊自適應內模控制[J].中國電機工程學報,2008,28(23):93-98.Huang Yu,Han Pu,Li Yongling.Fuzzy adaptive internal model control in main steam temperature system[J].Proceedings of the CSEE,2008,28(23):93-98.
[2]李學明,劉吉臻,李志軍,等.過熱蒸汽溫度控制系統優化[J].熱力發電,2004,33(5):42-44.
[3]夏蕾,袁鎮福.火電廠鍋爐主汽溫度控制策略研究[J].鍋爐技術,2007,38(5):6-10.
[4]寇懷成,吳云潔,陳燕娥.基于模糊多模型的專家PID在主汽溫控制系統中的應用研究[J].系統仿真學報,2008,20(23):6398-6400.Kou Huaicheng,Wu Yunjie,Cheng Yane.Study of expert PID main steam temperature control based on multiple models[J].Journal of System Simulation,2008,20(23):6398-6400.
[5]王鵬英.模糊Smith在溫控系統中的仿真研究[J].計算機仿真,2011,28(6):247-250.Wang Pengying.Simulation on temperature control system based on fuzzy Smith[J].Computer Simulation,2011,28(6):247-250.
[6]張平,苑明哲,王宏.大時滯系統自適應模糊Smith控制[J].計算機仿真,2006,23(9):87-90.Zhang Ping,Yuan Mingzhe,Wang Hong.Self-adaptive fuzzy-Smith control for a long time-delay system[J].Computer Simulation,2006,23(9):87-90.
[7]崔曉波,王明春,張雨飛.一種改進的主汽溫Smith預估補償控制[J].鍋爐技術,2011,42(4):23-26.
[8]金以慧.過程控制[M].清華大學出版社,1993:143-145.
[9]劉亭莉,黃廷磊.基于模糊Smith方法的溫控系統仿真研究[J].計算機仿真,2010,27(2):170-174.Liu Tingli,Huang Tinglei.Simulation of temperature control system based on fuzzy Smith control[J].Computer Simulation,2010,27(2):170-174.
[10]張荷芳,王杰,易善偉.基于Smith預估的模糊PID串級中央空調水系統控制[J].西安工業大學學報,2012,32(4):330-333.
[11]黃宇,王東風,韓璞.模糊自整定PID控制及其在過熱汽溫系統中的應用[J].電力科學與工程,2004(3):37-40.
[12]陳來久.熱工過程自動調節原理和應用[M].北京:水利電力出版社,1982:324-327.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19