電力系統(tǒng)穩(wěn)定器對低頻振蕩抑制效果的研究
2013-09-19 10:29:56李昂
電子設(shè)計工程 2013年5期
李昂
(陜西理工學院 電氣工程學院,陜西 漢中 723003)
電力系統(tǒng)運行時,在負荷突變等小擾動的作用下,發(fā)電機轉(zhuǎn)子之間會發(fā)生相對搖擺,這時電力系統(tǒng)如果缺乏必要的阻尼就會失去動態(tài)穩(wěn)定。由于電力系統(tǒng)的非線性特性,動態(tài)失穩(wěn)表現(xiàn)為發(fā)電機轉(zhuǎn)子之間的持續(xù)的振蕩,同時輸電線路上功率也發(fā)生相應的振蕩,影響了功率的正常輸送。由于這種持續(xù)振蕩的頻率很低,一般在0.2~2.5 Hz之間,故稱為低頻振蕩。低頻振蕩在國內(nèi)外均有發(fā)生,通常出現(xiàn)在遠距離、重負荷的輸電線路上,或者互聯(lián)系統(tǒng)的弱聯(lián)絡(luò)線上,在采用快速響應高放大倍數(shù)勵磁系統(tǒng)的條件下更容易出現(xiàn)。
目前,電力系統(tǒng)普遍采用在勵磁調(diào)節(jié)器上附加電力系統(tǒng)穩(wěn)定器(PSS)的附加勵磁控制方案。它能有效地增強發(fā)電機勵磁系統(tǒng)的阻尼,抑制低頻振蕩的發(fā)生,是提高電力系統(tǒng)動態(tài)穩(wěn)定性的最經(jīng)濟和最有效的的措施。PSS在國內(nèi)外得到了廣泛應用,我國新投運的大中型發(fā)電機組都要求安裝PSS[1]。本文介紹了低頻振蕩的產(chǎn)生機理及發(fā)電機附加勵磁控制對低頻振蕩的抑制原理,通過對一個典型的單機—無窮大系統(tǒng)在不同擾動方式下的動態(tài)過程仿真,說明了附加勵磁控制對電力系統(tǒng)動態(tài)穩(wěn)定性的影響。
1 低頻振蕩產(chǎn)生機理
一般認為,發(fā)生低頻振蕩的主要原因是現(xiàn)代電力系統(tǒng)中大容量發(fā)電機的標幺值電抗增大,造成了電氣距離的增大,再加之遠距離重負荷輸電,造成系統(tǒng)對于機械模式(其頻率由等值發(fā)電機的機械慣性決定)的阻尼減少了;同時由于高放大倍數(shù)的快速勵磁系統(tǒng)提供的附加勵磁電流在相位上滯后于轉(zhuǎn)子角的變化,進一步加重了負阻尼的狀況,即對振蕩的阻尼起了相反的作用,也就是所謂的“負阻尼”作用。
大型同步發(fā)電機勵磁系統(tǒng)一般由勵磁功率單元和勵磁控制部分(勵磁調(diào)節(jié)器)兩部分組成。由于勵磁調(diào)節(jié)器按照發(fā)電機端電壓偏差進行調(diào)節(jié),也稱為自動電壓調(diào)節(jié)器(AVR),它是勵磁主控制器。隨著自動化技術(shù)的發(fā)展,調(diào)節(jié)器的調(diào)壓精度越來越高,勵磁電源的響應也越來越快。快速勵磁系統(tǒng)的確能夠改善同步轉(zhuǎn)矩,從而提高系統(tǒng)在第一搖擺周期的暫態(tài)穩(wěn)定性。然而,快速勵磁系統(tǒng)一般是高放大倍數(shù)的負反饋系統(tǒng),它對第一搖擺周期以后系統(tǒng)振蕩的阻尼影響很小,有時甚至減小系統(tǒng)對振蕩的阻尼。在系統(tǒng)呈現(xiàn)負阻尼特性時,快速勵磁系統(tǒng)(特別是高放大倍數(shù)時)通常是增大負阻尼,從而惡化系統(tǒng)的運行情況[2]。
并不是所有勵磁裝置都產(chǎn)生負阻尼,理論和實踐都證明,在遠距離重負荷輸電的單機—無窮大系統(tǒng)完整的線性模型(又稱Phillips-Heffron模型,如圖1所示)中,由于可能變負值,并且由于高放大倍數(shù)快速響應勵磁系統(tǒng)的存在,可能導致系統(tǒng)中的阻尼為負,一旦此負阻尼比發(fā)電機阻尼繞組、勵磁繞組的正阻尼和機械正阻尼還強,則系統(tǒng)在頻率擾動下可能出現(xiàn)振蕩失穩(wěn)。這時如果實際存在的發(fā)電機電氣的和機械的正阻尼較小,則該系統(tǒng)可能發(fā)生低頻振蕩[3]。
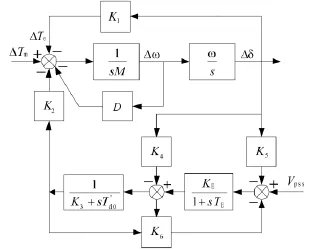
圖1 單機-無窮大系統(tǒng)Phillips-Heffron模型Fig.1 Phillips-Heffron model of single machine-infinite bus system

式中:xe、vc分別為發(fā)電機與系統(tǒng)間的聯(lián)系電抗、系統(tǒng)母線電壓;其余為發(fā)電機參數(shù)和運行變量。
2 電力系統(tǒng)穩(wěn)定器的工作原理
重負荷、高放大倍數(shù)的快速勵磁系統(tǒng)是引起低頻振蕩的主要原因。因此,當出現(xiàn)低頻振蕩,可以通過減少輸送容量,增強網(wǎng)架結(jié)構(gòu)(使K5>0),或者退出快速勵磁系統(tǒng),改用手動或常規(guī)勵磁調(diào)節(jié)器來處理。但前者不經(jīng)濟,后者不利于大擾動下的暫態(tài)穩(wěn)定,因此最根本的方法是設(shè)法引入一個附加的阻尼力矩,這可以通過設(shè)置電力系統(tǒng)穩(wěn)定器PSS來解決。
PSS是一種附加勵磁控制,其實質(zhì)是提供勵磁系統(tǒng)一個附加信號,通過勵磁系統(tǒng)去增加發(fā)電機的阻尼轉(zhuǎn)矩。它可以使用發(fā)電機轉(zhuǎn)子速度、加速功率或系統(tǒng)頻率,以及這些信號的組合作為輸入信號。PSS具有物理概念清晰、現(xiàn)場調(diào)試方便、現(xiàn)場工作人員易于接受掌握等優(yōu)點。
圖2給出PSS傳遞函數(shù)框圖。PSS裝置包括信號處理單元、隔直單元、超前—滯后單元、放大單元和限幅單元。系統(tǒng)中的振蕩信號通過PSS時經(jīng)信號處理單元濾波后接入隔直單元;隔直單元濾掉小于等于0.01 Hz的直流次要信號,該單元只有輸入的頻率大于0.01 Hz時才輸出信號,否則自動閉合,處于待命狀態(tài);超前—滯后單元補償傳感器、高頻濾波器及其它單元對主要信號所造成的相位滯后,該單元根據(jù)需要可以有不同的級數(shù);放大單元將補償后的信號放大;限幅單元的作用是防止故障時發(fā)電機的機端過電壓。

圖2 PSS通用框圖Fig.2 Ordinary block diagram of PSS
圖中:K 為增益,Tw為隔直環(huán)節(jié)的時間常數(shù),T1、T2、T3、T4為超前—滯后環(huán)節(jié)的時間常數(shù)。
若取Δω為PSS輸入信號,其傳遞函數(shù)為GPSS(s)=GPSS<ΦPSS。PSS輸出VPSS作為勵磁附加控制信號,由圖1可知附加的阻尼力矩為

若使 GPSS(s)的超前相位 ΦPSS恰好等于式(2)分母的相位Φ3,則

以Δω為輸入信號的PSS使用的是超前網(wǎng)絡(luò),超前網(wǎng)絡(luò)在高頻段增益變大,所以對發(fā)電機扭動振蕩極為敏感,使扭動振蕩更加嚴重。以ΔP作為輸入信號,檢測方便,所需超前角度小,穩(wěn)定性好,已得到廣泛應用,但存在反調(diào)現(xiàn)象。以ΔP和Δω同時為輸入信號,它們可以相互補償,減小反調(diào)現(xiàn)象的影響[4]。本文就以ΔP和Δω同時作為輸入信號的PSS(如圖3所示,圖中Kp為功率增益、KΔ為頻率增益)加以探討。

圖3 輸入信號為ΔP+Δω的PSS框圖Fig.3 Block diagram of PSS in ΔP+Δω input

圖4 PID勵磁控制傳遞函數(shù)框圖Fig.4 Transfer function of PID excitation control
3 附加勵磁控制對抑制低頻振蕩的仿真
3.1 勵磁控制系統(tǒng)模型

為了保證問題研究具有普遍性,本文選擇了典型的單機一無窮大電力系統(tǒng),如圖5所示。該系統(tǒng)由發(fā)電機組、變壓器、雙回輸電線路、廠用電負荷和無窮大系統(tǒng)組成。其中發(fā)電機系統(tǒng)由同步發(fā)電機、勵磁控制系統(tǒng)(AVR+PSS)構(gòu)成;無窮大系統(tǒng)由12 000 MVA電源和500 MVA負荷復合而成。同時依據(jù)問題研究的側(cè)重點,忽略原動機的出力變化,供給同步發(fā)電機恒定的機械功率。選擇Step(階躍)函數(shù)作為信號源;PID環(huán)節(jié)、限幅環(huán)節(jié)、PSS環(huán)節(jié)為封裝子系統(tǒng)。仿真參數(shù)設(shè)置:Start time為 0,Stop time為 30;Solver options為 Variable-step和 ode23tb(stiff/TR-BDF2);Relative tolerance 為 1e-3,其他參數(shù)為默認參數(shù)。

圖5 單機-無窮大系統(tǒng)模型Fig.5 Single machine-infinite bus system
3.2 暫態(tài)過程仿真
搭建好圖5所示的仿真模型后,并將故障功能模塊參數(shù)設(shè)置后,對系統(tǒng)在大擾動和小擾動下的穩(wěn)定運行能力進行模擬仿真。
3.2.1 小擾動仿真
在t=14 s時,發(fā)電機機端電壓參考值階躍5%,進行小擾動仿真。如圖6所示的仿真波形來看,勵磁控制器表現(xiàn)出了很好的靜態(tài)穩(wěn)定性能,功角和轉(zhuǎn)速的擾動波動幅度很小,功角4 s后趨于穩(wěn)定,功角8 s后趨于穩(wěn)定。
3.2.2 大擾動仿真
在t=15 s時,升壓變壓器出線端三相短路,0.1 s后故障切除,進行大擾動仿真。
如圖7所示的仿真波形來看,功角在短路故障(大擾動)時迅速減小,故障消除后,由于勵磁控制器的調(diào)節(jié)作用迅速恢復穩(wěn)定運行(8 s后),轉(zhuǎn)子間的轉(zhuǎn)速也很快趨于同步(15 s后),功率振蕩較快平息,低頻振蕩得到有效抑制。
3.3 仿真結(jié)果分析

圖6 機端電壓參考值階躍時的仿真波形Fig.6 Simulation waves when adding disturbance of 5%

圖7 三相短路故障時的仿真波形Fig.7 Simulation waves when fault of three-phase short circuit
由上可見PSS有明顯的提高阻尼的作用。無論小干擾還是大干擾,都可以使負阻尼(或弱阻尼)變?yōu)閺娮枘幔矣泻芎玫倪m應性(魯棒性),可以滿足在各種運行方式下穩(wěn)定運行的需要。PSS的作用使得發(fā)電機產(chǎn)生了附加電磁功率,該附加功率增強了系統(tǒng)的阻尼,使第一次功角振蕩回擺的幅度明顯減小,明顯改善了發(fā)電機的運行特性。
4 結(jié)束語
電力系統(tǒng)穩(wěn)定器PSS對于電力系統(tǒng)穩(wěn)定性的作用程度主要取決于 2點:1)PSS的安裝位置;2)PSS的參數(shù)[7]。 文中采用以和同時為輸入信號的PSS作為勵磁附加控制系統(tǒng),通過對單機—無窮大系統(tǒng)在大擾動和小擾動下的穩(wěn)定運行能力進行模擬仿真,定性的分析了勵磁控制系統(tǒng)對于穩(wěn)定性的影響。從仿真結(jié)果可以看出,PSS可以提供足夠的正阻尼,有效克服AVR的負阻尼作用,提高了系統(tǒng)動態(tài)穩(wěn)定性。但是在復雜多機系統(tǒng)中,型號及配置地點的選擇是相當復雜且重要的。若選擇不當,甚至會使系統(tǒng)低頻振蕩更為嚴重[8]。
[1]張茂盛.大型發(fā)電機勵磁系統(tǒng)淺析[J].山西電力,2007(6):51-54.
ZHANG Mao-sheng.Analysis of large-scale unit of excitation system[J].Shanxi Electric Power,2007(6):51-54
[2]王錫凡,方萬良,杜正春.現(xiàn)代電力系統(tǒng)分析[M].北京:科學出版社,2003.
[3]姚強.電力系統(tǒng)低頻振蕩及其抑制方式的研究與仿真[J].電工電氣,2010(12):1-6.
QIANG Yao.Studyand simulation oflow frequency oscillation for power system and its inhibition method[J].Diangong Dianqi,2010(12):1-6.
[4]楚文斌,劉覺民,劉軍志,等.具有新型PSS的勵磁系統(tǒng)建模與仿真[J].電機與控制應用,2009(12):6-25.
CHU Wen-bin,LIU Jue-min,LIU Jun-zhi,et al.Modeling and simulation about included new PSS of excitation system[J].Electric Machines&Control Application,2009(12):6-9.
[5]李維波.MATLAB在電氣工程中的應用[M].北京:中國電力出版社,2006.
[6]相偉,馬幼捷,周雪松,等.PID勵磁控制對比例式勵磁調(diào)節(jié)效果的改善[J].天津理工學院學報,2004(2):5-7.
XIANG Wei,MA You-jie,ZHOU Xue-song,et al.The limitation of proportional control and the improvement of PID control of the excitation systems[J].Journal of Tianjin Institute of Technology,2004(2):5-7.
[7]張帆,李劍峰,王偉,等.基于MATLAB的PSS和SVC對電力傳輸穩(wěn)定性的仿真[J].電氣開關(guān),2009(1):40-42.
ZHANG Fan,LI Jian-feng,WANG Wei,et al.The simulation of PSS and SVC to stability of electric power pransmission based on MATLAB[J].Electric Switchgear,2009(1):40-42.
[8]倪以信,陳壽孫,張寶霖.動態(tài)電力系統(tǒng)的理論和分析[M].北京:清華大學出版社,2002.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
