基于模糊理論的開關磁阻電機直接轉矩控制
2013-09-20 00:24:38王子煜鄧福軍
大連交通大學學報 2013年2期
關鍵詞:系統
王子煜,鄧福軍
(大連交通大學 電氣信息學院,遼寧 大連 116028)*
0 引言
開關磁阻電機(SRM)的雙凸極結構和開關式的供電電源模式,是其固有的轉矩脈動的根源,嚴重限制了SRM在工業領域的應用范圍[1-3].因此,轉矩脈動抑制方面的研究是當前的熱點[4].眾所周知,DTC的獨特性在于轉矩的直接控制,動態響應很快,且已在感應電機控制應用中獲得成功.研究表明,將DTC引入到SRD中,回避了復雜的數學模型的同時,在抑制SRM轉矩脈動方面,效果也比較理想,從而獲得了較好的轉矩、轉速控制效果[5],大大拓寬了SRM的應用市場.傳統的DTC技術采用兩個滯環比較器來分別控制定子磁鏈和電磁轉矩,其關鍵在于怎樣合理的選擇電壓空間矢量來實現對磁鏈以及轉矩的控制[6].而通過滯環來控制磁鏈和轉矩,很難達到理想的性能指標.模糊控制(Fuzzy Control)技術不要求建立精準的系統模型,它通過工程實踐,逆向總結出經驗規律法則,以此來控制系統,其特性非常適用于SRM的DTC系統.本文將模糊控制技術引入到開關磁阻電機直接轉矩控制系統(SRM_DTC)中,以此改進其轉矩環節,從而構建出基于模糊邏輯的SRM_DTC系統(SRM_Fuzzy_DTC),并且在MATLAB/SIMULINK軟件環境中對之進行仿真,其波形可以看出,改進后的系統在控制轉矩的效果方面明顯得到了改善.
1 SRM_Fuzzy_DTC的結構原理
SRM的瞬時轉矩可用下式來表達:

由于SRM單極性的供電結構,由式(1)可看出,電機轉矩的正負由的符號決定.
那么,保持定子電流的幅值不變,當定子磁鏈對電機轉子角度的變化率為正時,將之定義為超前轉子位置,此時磁鏈處于加速狀態,電機轉矩增加;反之,當變化率為負時,定義為滯后電機轉子位置,磁鏈減速,電機轉矩減少.并且,在一個微小周期內,控制定子磁鏈加、減速,此時定子電流會受到一階延遲的作用,可視其恒定不變.那么,只要改變磁鏈的加、減速狀態,就能達到控制轉矩的目的.于是,在SRM_DTC系統中,可通過控制磁鏈矢量幅值的大小和旋轉速度來調節電機的轉矩.
當SRM高速運行時,定子電阻的壓降影響很小,SRM單相的電壓平衡方程可簡化為:ΔΨ≈u·Δt,可以看出,定子磁鏈矢量變化的方向與所加電壓矢量方向一致.這樣,通過磁鏈來控制轉矩就轉化為選擇合適的電壓空間矢量來控制轉矩.
借鑒永磁同步電機DTC系統中模糊控制技術的應用[7],在SRM_DTC系統中也將兩者結合.針對SRM_DTC系統的自身結構,將轉矩、磁鏈偏差用量化因子處理,并映射到相應的模糊集合中,然后判斷磁鏈角所屬扇區,由此推導出相應規則,然后經過模糊算法,得到期望的電壓矢量,將之解模糊,輸出給逆變器.
SRM_Fuzzy_DTC的系統結構如圖1所示:
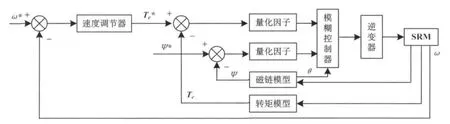
圖1 SRM_Fuzzy_DTC系統原理框圖
從該系統的原理框圖可以看出:
根據實際測得的SRM各相繞組的電壓、電流、轉子位置角,通過建立的磁鏈觀測模型和轉矩觀測模型分別估算出其瞬時磁鏈Ψ和瞬時轉矩Te,通過4/2變換,由α-β坐標系中磁鏈的兩個分量得到定子磁鏈的空間位置角θ.將磁鏈偏差EΨ、轉矩偏差ET和磁鏈角θ作為模糊控制器的三個輸入量,將輸出量解模糊后,控制逆變器的開關狀態,最終控調節SRM的轉矩.其中速度調節器仍采用PID調節器,其輸出作為電機轉矩的參考給定[8].
2 模糊控制器的設計
本文中的模糊控制器輸入量為模糊化后的磁鏈偏差EΨ、轉矩偏差ET,定子磁鏈角θ,其表達式如下:
由于定子磁鏈脈動較小,且不是主要控制目標,故其偏差定義的模糊子集個數相對較少,為:{N,Z,P},分別代表模糊集合的語言含義為:{負,零,正};而電機轉矩是主要控制量,關系到系統性能,且其脈動較大,不易限制,故需要在其論域上細分偏差等級,相應的模糊子集為:{NB,NS,Z,PS,PB},分別代表模糊集合的語言含義為:{負大,負小,零,正小,正大}.
將定子磁鏈角均分為12段,并根據SRM與感應電機相數的不同,對其隸屬函數曲線做出調整.
輸出向量中的每個元素,分別對應SRM每相的電壓狀態,合成后即為期望的電壓矢量.
輸入變量的各隸屬函數如圖2所示:
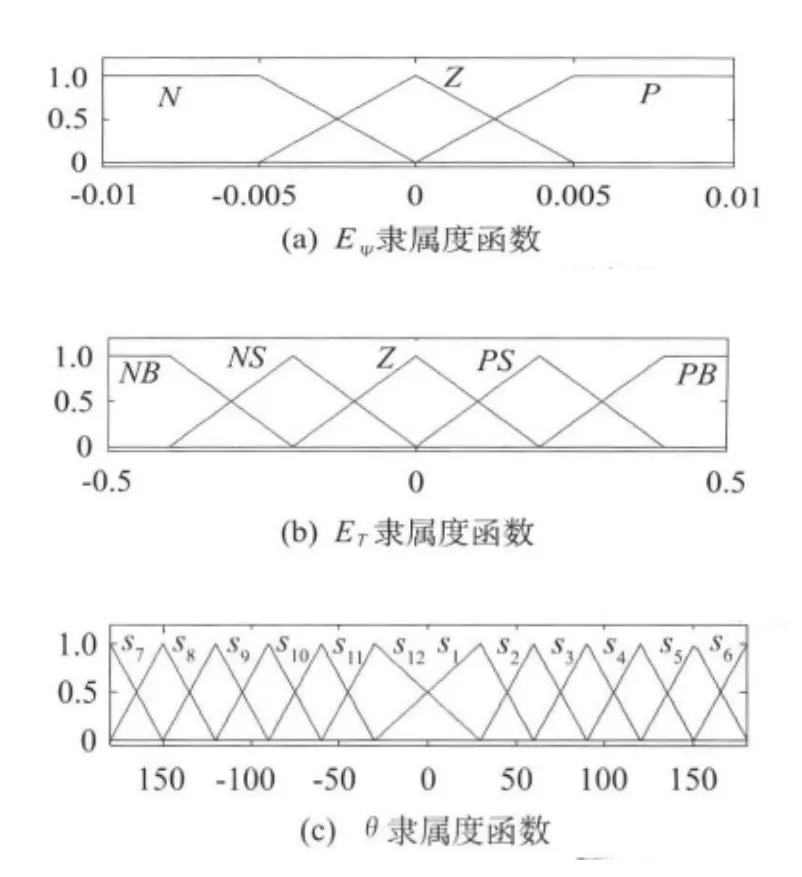
圖2 模糊控制器輸入量的隸屬函數圖
建立模糊規則時,根據輸入偏差的等級不同,要選擇相應的電壓空間矢量,且由于開關表中的電壓矢量數目有限,對于磁鏈、轉矩偏差而言,很難同時滿足二者的控制要求.那么,在SRM_DTC系統起動初始,磁鏈偏差很大,為了提高最大轉矩的建立速度,需優先滿足磁鏈的控制要求;當磁鏈的幅值達到給定值后,由于其脈動較小,且較易控制,此時的原則就轉為優先滿足轉矩的控制要求.
在SRM_Fuzzy_DTC系統下,基于模糊理論的DTC規則如附表所示:
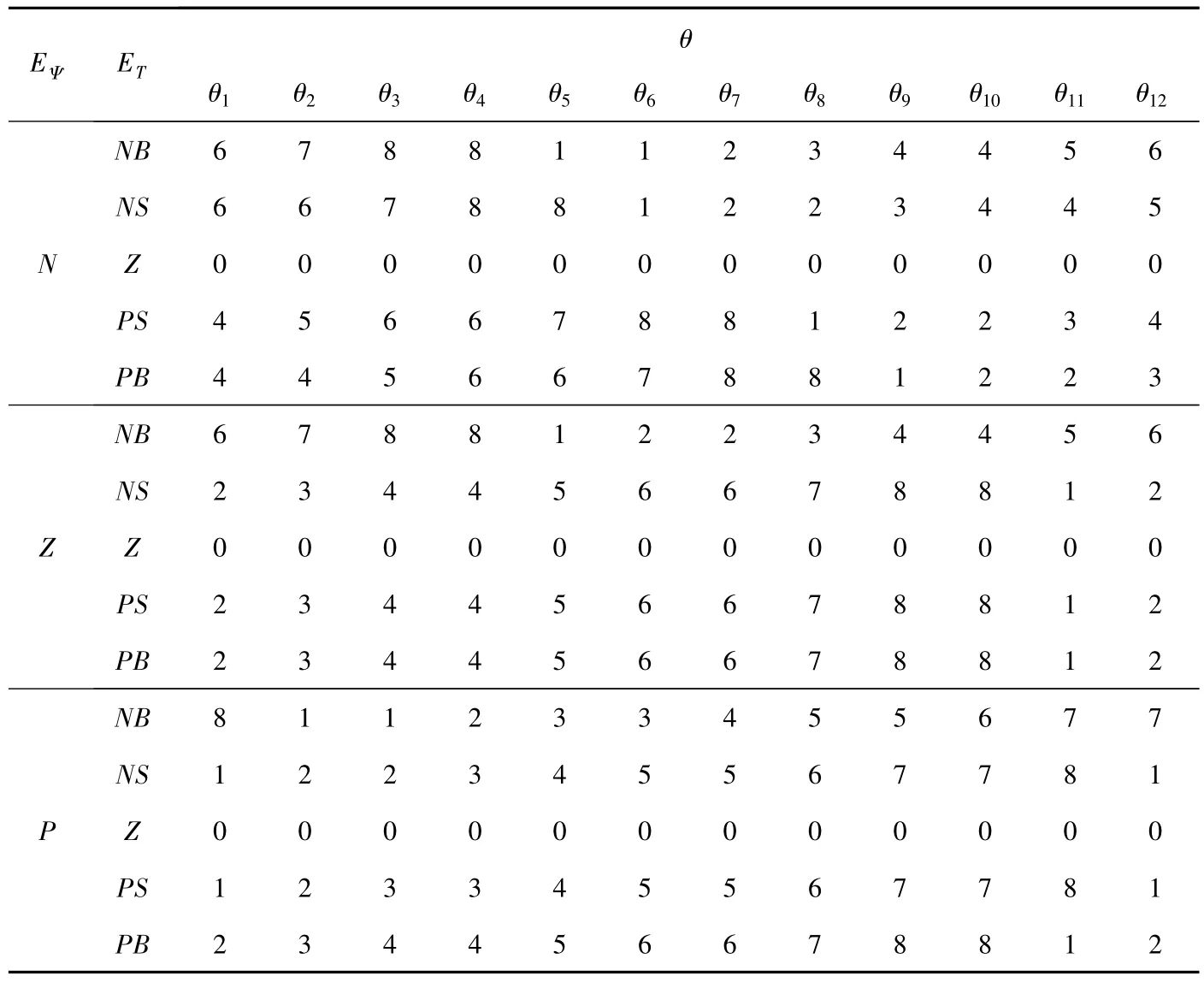
附表 模糊控制規則表
將模糊規則用if-then的形式來表述,則第i條語言為:

其中,Ai、Bi、θi以及 ui分別為磁鏈偏差、轉矩偏差、定子磁鏈角以及電壓空間矢量的模糊化后的子集變量.
模糊推理采取常用的Mamdani法,第i條控制規則的隸屬度ai為:

式中,μAi(εΨ),μBi(eT),μCi(θ)分別為輸入量EΨ,ET,θ的隸屬函數.
再取“交”集,得到輸出量的隸屬函數μVi(S)為:

式中,μVi(S)為輸出量S的隸屬函數.
所有被激活的模糊規則均有各自的μVi(S),對之取“并”集,則合并后的隸屬函數為μV(S):

式中,S為基本工作電壓矢量.
采用最大值法對μV(S)處理后,即可得到期望的電壓空間矢量輸出信號.
3 仿真結果及分析
為驗證所設計的SRM_Fuzzy_DTC系統的合理性和有效性,采用MATLAB/SIMULINK軟件,利用其自帶的Fuzzy模塊,構建模糊控制器[9],其輸出需經過一定處理后才能控制逆變器,本文中采用S函數的形式構建信號轉化模塊[10].對改進后的系統進行仿真,并與SRM_DTC系統作對比分析.
仿真系統的部分參數設定如下:
本系統采用四相8/6極SRM,磁鏈給定值Ψ*=0.3 Wb,轉速給定值 n*=1 400 r/min,SRM空載起動,仿真時間為1 s.
采用傳統DTC算法的SRM_DTC系統仿真結果如圖3所示.
由圖3可以看出,在按照一定規則加在定子繞組上的電壓矢量的作用下,定子磁鏈的幅值保持在滯環容差范圍內,近似為圓形軌跡,電機轉矩在0.055 s時達到給定值,系統達到穩態,此時轉矩在-5~+4 N·m的范圍內波動,系統動、靜態性能較好.
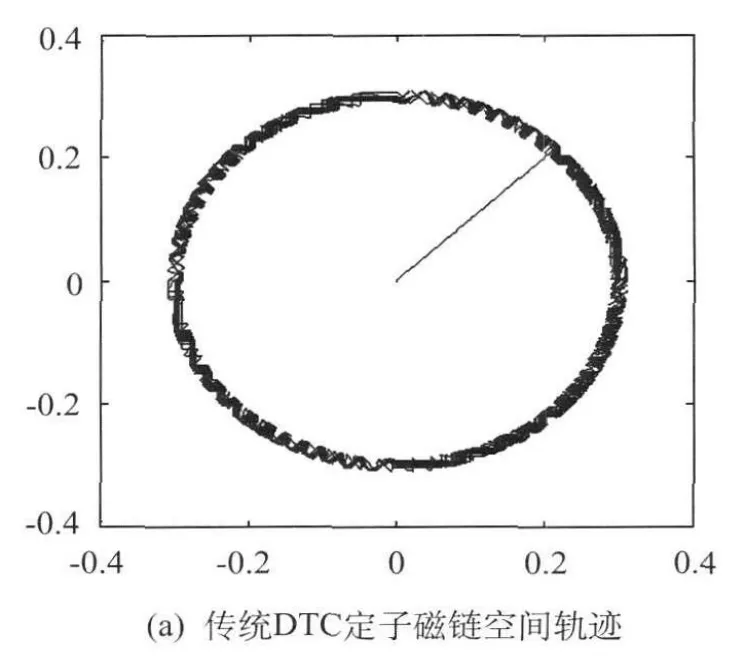

圖3 SRM_DTC系統仿真波形
基于模糊邏輯的改進后的SRM_Fuzzy_DTC系統仿真結果如圖4所示:
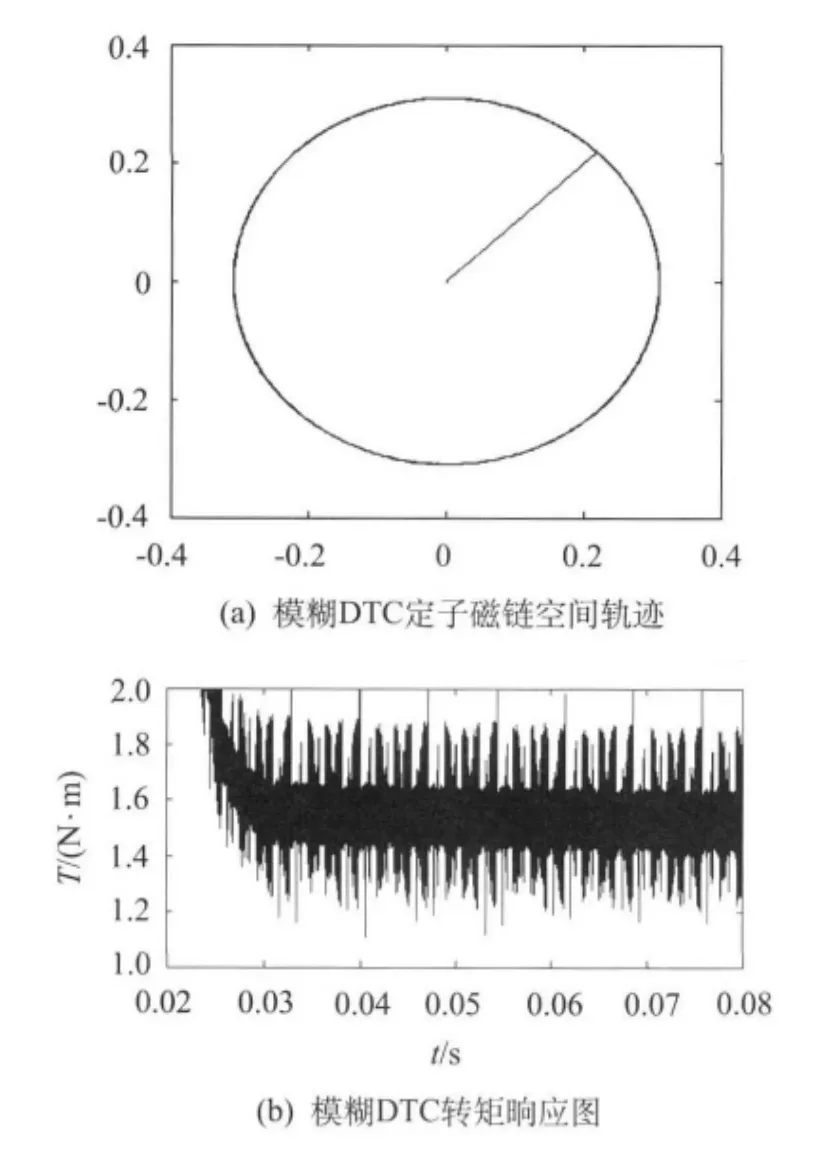
圖4 SRM_Fuzzy_DTC系統仿真波形
由圖4可以看出,改進后的SRM_Fuzzy_DTC系統,其定子磁鏈軌跡同樣很好的近似達到圓形,且與SRM_DTC系統相比,其滯環寬度較小,表明磁鏈幅值的脈動較小,對于磁鏈幅值的控制效果明顯更佳,并且在SRM起動時,磁鏈的幅值呈線性增長,很快達到給定值,加快了電機最大轉矩的建立速度,從而優化了系統的動態性能.
而電機的轉矩在0.03 s達到穩態,此時轉矩在+1~+2 N·m的范圍內波動.同SRM_DTC系統相比,SRM_Fuzzy_DTC系統的轉矩脈動相對較小,系統的動、靜態性能也有了明顯提升.
4 結論
本文結合了Fuzzy Control技術和DTC技術,提出了新型的直接轉矩模糊控制算法,根據SRM_DTC系統中的磁鏈偏差、轉矩偏差和定子磁鏈位置角,通過模糊規則,優化選擇恰當的電壓空間矢量,提高了對電機磁鏈、轉矩的控制效果.與采用傳統DTC算法的SRM_DTC系統相比,采用新算法的SRM_Fuzzy_DTC系統轉矩脈動較小,而動態響應較快,仿真結果驗證了本文提出的新型模糊DTC算法的合理性和有效性.
[1]吳建華.開關磁阻電機設計與應用[M].北京:機械工業出版社,2000:152-167.
[2]王宏華.開關型磁阻電動機調速控制技術[M].北京:機械工業出版社,1995:12-20.
[3]KRISHNAN R.Switched Reluctance Motor Drives:Modeling,Simulation,Analysis,Design,and Applications[M].CRC Press,2001:361-375.
[4]王慶龍,汪增福,張興,等.SRM轉矩脈動抑制的控制策略分析[J].電氣傳動,2012,42(2):3-6.
[5]NISAI H FUENGWAEODSAKUL,MARCUS MENNE,ROBERT B INDERKA,et al.High-dynamic Four-quadrant Switched Reluctance Drive Based on DITC[J].IEEE Trans.Industry Application,2005,41(5):1232-1242.
[6]周揚忠,胡育文.交流電動機直接轉矩控制[M].北京:機械工業出版社,2009:73-98.
[7]孫丹,賀益康,智大為,等.基于模糊邏輯的永磁同步電動機直接轉矩控制[J].電工技術學報,2003,18(1):33-38.
[8]張令霞,張興華.直接轉矩控制系統的Matlab建模與仿真[J].電氣傳動,2011,41(1):9-13.
[9]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學出版社,2008:134-179.
[10]黃志武,劉心昊,年曉紅,等.基于Simulink/S函數的直接轉矩控制系統仿真研究[J].自動化技術與應用,2006,25(4):52-56.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
