SOPC和ZigBee的三維移動天線平臺設計
2013-09-21 10:44:08莊熠孟曉風李欣
單片機與嵌入式系統應用 2013年1期
莊熠,孟曉風,李欣
(北京航空航天大學 儀器科學與光電工程學院,北京 100191)
引 言
高精度的三維移動天線平臺在許多測試測量場合得到廣泛應用。然而,現有的高精度天線平臺大多為單一平臺,本文提出了一種多平臺組合控制、協調工作的解決辦法。
1 系統組成

圖1 系統組成框圖
三維移動天線平臺系統按照功能劃分,主要由測控系統、通信網絡、運動執行機構組成,如圖1所示。其中,測控系統由測控計算機、手持控制器組成;通信網絡采用ZigBee無線通信網絡;運動執行機構由兩個差動轉速輪式移動平臺搭載高精度天線桅桿構成。運動執行機構裝有兩個ELDS-C高精度激光測距傳感器(測距范圍0.05~30 m、精度±3mm)及用于移動平臺初始對準的一字激光發射器和接收器。
2 運動執行系統設計
2.1 運動執行機構坐標定義

圖2 坐標定義示意圖
為了確定運動執行機構的移動方向與坐標,定義天線移動平臺坐標系,如圖2所示。以兩水平移動控制電機同步正轉行進方向為y正方向,以從x軸方向向y軸方向旋轉為平臺旋轉正方向(對應旋轉控制電機正轉),天線向上升高方向為z正方向(對應升降控制電機正轉)。
2.2 運動控制器硬件設計
運動控制器在水平移動控制電機、天線升降移動控制電機、天線旋轉極化控制電機以及激光測距傳感器等部件的支持下完成天線位置與姿態的測量與控制。運動控制器分為主控板和接口板兩部分。
2.2.1 主控板
運動控制器主控板由處理器單元(Nios II軟核)、存儲器、JTAG調試接口等組成,它具有通用的DI、DO、RS232等接口。
核心芯片選用Atera公司的Cyclone II系列FPGA芯片EP2C8Q208C。Altera Cyclone II采用全銅層、1.2V SRAM工藝設計,Cyclone II器件提供了4 608到68 416個邏輯單元(LE),并具有一整套最佳的功能,包括嵌入式18位×18位乘法器、專用外部存儲器接口電路、4Kb嵌入式存儲器塊、鎖相環(PLL)和高速差分I/O能力[1]。主控板組成框圖如圖3所示。

圖3 運動控制器主板組成框圖
2.2.2 接口板
接口板是針對測控對象的測控需求與電氣接口特點設計的,它將主控板的通用電接口轉換為測控專用接口,包括水平運動控制接口電路、垂直升降運動控制接口電路、旋轉極化控制接口電路、初始對準輔助設備接口電路、系統狀態燈驅動電路等,其組成與連接關系如圖4所示。
步進電機控制接口部分充分利用Nios II軟核的高度可制定性,自定義設計了一個符合Avalon總線標準的步進電機控制IP核。該IP核可以像操作標準外設一樣讀寫相應寄存器,實現具體的控制。其寄存器映射如表1所列。其中,period寄存器值對應電機運行速度,number寄存器對應電機運行距離。

圖4 運動控制器接口板組成與連接關系

表1 步進電機控制IP核寄存器映像表
圖5為Quartus II軟件生成的步進電機控制IP核的從外設框圖。
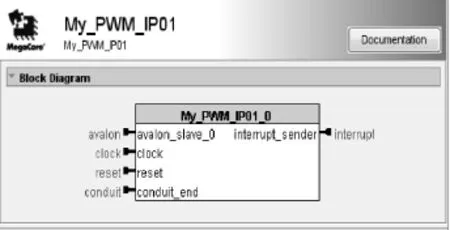
圖5 步進電機控制IP核從外設模塊框圖
2.3 運動控制器軟件設計
由于運動控制器需要完成本地按鍵任務、遠程鍵盤任務、PC機任務,其中PC機任務又分為平臺水平初始對準任務、天線垂直調零任務、天線極化調零任務、運動任務等,因此運動控制器軟件系統使用μC/OS-II實時操作系統完成任務的調度和處理。
系統上電完成必要設備初始化之后,控制通信模塊上電,完成無線組網功能。操作系統創建本地按鍵任務、遠程鍵盤任務和PC機任務。本地按鍵任務由外部中斷觸發Key_Sem信號量控制執行。遠程鍵盤任務和PC機任務由通信模塊控制執行。按鍵命令格式:KEY:key_value:YEK(12字節),按鍵命令取值如表2所列。

表2 按鍵命令取值
計算機命令取值如表3所列,計算機命令格
式如下:
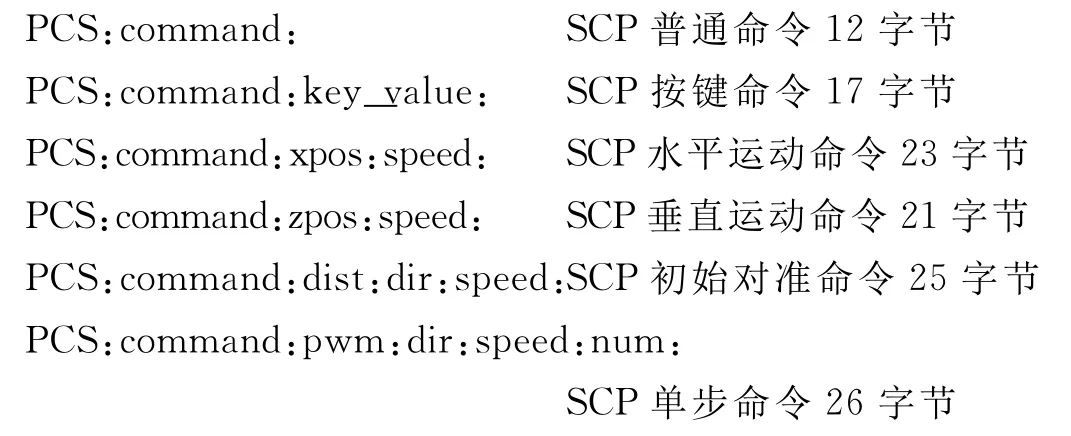

表3 計算機命令取值
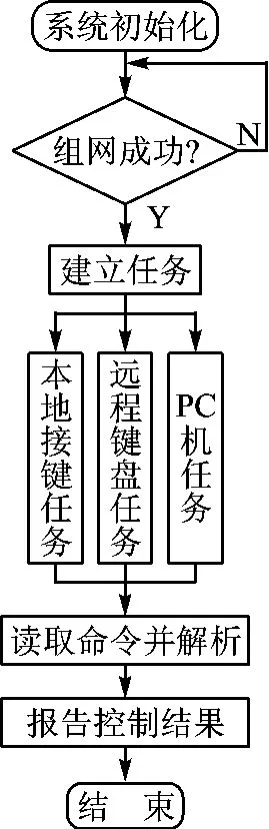
圖6 系統軟件流程圖
系統命令可劃分為簡單非定量命令(前進、后退等),復雜非定量命令(水平對準、垂直調零等)和定量命令(水平運動、垂直運動)3種。其中簡單非定量命令在相應任務中獲取解析后直接讀/寫步進電機控制模塊寄存器完成控制。而接到復雜非定量命令后,根據命令取值建立不同的任務,在新建任務完成相應操作后向命令發送方回復應答數據,并刪除自身,等待下一次命令再次新建該任務。定量命令包括坐標值命令(水平命令、垂直命令)和寄存器值命令(單步命令)。單步命令中包含相應電機控制寄存器值(即包含速度、距離、方向控制信息),相應任務直接提取數據完成電機控制。坐標值命令包含預定目標x、y坐標值,系統根據自身坐標(當前傳感器值)計算得出電機控制寄存器值完成動作。系統軟件流程圖如圖6所示。
系統子任務中,水平初始對準任務和天線垂直調零任務最為重要。它不僅是移動平臺位置初始化過程,更是系統建立空間坐標系的基礎。因此,該任務實現的好壞,直接影響移動平臺控制的可靠性。設計完善的應答機制,合理地使用信號量、標志組等,是任務設計合理可靠的關鍵。其簡化流程圖如圖7所示。

圖7 單平臺初始對準任務流程圖
3 無線通信設計
3.1 ZigBee技術簡介
ZigBee技術是一種應用于短距離、低傳輸數據速率下的各種電子設備之間的無線通信技術。我國目前可以使用的ISM(Industrial,Scientific and Medical)頻帶為433 MHz和2.4GHz。ZigBee技術在我國工作在2.4GHz頻段,采用較高階的QPSK調制技術,可以達到250kb/s的速率,并減少工作時間,以降低功耗。在MAC層采用CSMA/CA方式,以提高系統兼容性。網絡層方面,ZigBee聯盟規定可以采用星形和網狀拓撲[2-3]。
ZigBee具有以下特性:功耗低、可靠性高、網絡容量大、保密性高。
3.2 無線通信網絡拓撲結構
考慮到系統除測控計算機節點外,其余3個節點均為移動節點,移動范圍在30m左右,而手持控制器使用5號電池供電,功耗敏感。因此,設計采用簇狀網絡拓撲結構。即測控計算機為網絡協調器,1號移動天線平臺為路由器,2號移動天線平臺和手持控制器為終端設備。手持控制器采用低頻喚醒機制以延長電池使用壽命。網絡拓撲圖如圖8所示。
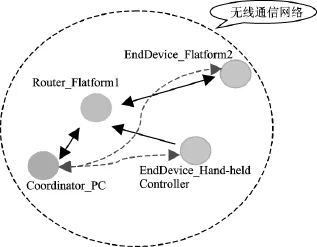
圖8 網絡結構拓撲圖
結 語
針對雙三維移動天線平臺精確定位與控制,提出了一種切實可行的方案。經過實驗驗證,移動天線平臺行進方向誤差5mm。天線水平極化和垂直極化誤差0.2°。系統充分利用了SOPC技術優勢,完成了兩平臺的綜合控制和協調工作。證明了系統具有高精度、高可靠性、高集成等特點。
[1] Altera.Quartus II Handbook Version 8.1Volume 5:Embedded Peripherals,2012
[2] TI.Datasheet for CC2530[EB/OL].[2012-08-12].http://www.ti.com.cn.
[3] IEEE 15.4—2006.Wireless Medium Access Control(MAC)and Physical Layer(PHY)Specifications for Low-Rate Wireless Personal Area Networks(WPANs)[S].
