混流式水輪機組的模糊滑模控制
2013-09-22 06:56:02楊敏軍
電氣傳動自動化 2013年4期
楊敏軍
(三峽大學電氣與新能源學院,湖北宜昌443002)
1 引言
隨著低碳環保時代的到來,低能耗的發電廠將會有更大的發展前途,其中尤以核電廠與以生產再生能源形式的企業為主。目前,零碳發電廠的水電能源占世界電能的19%[1],在很大程度上解決了能源短缺問題。一般情況下,一個典型的水力發電系統由水庫、引水管道、調壓室、水輪機、調速器、發電機以及電網組成。該系統是一個集水力、機械能與電能相交織在一起的復雜的動態系統[2]。由于工作的狀態不同,系統內部參數也會隨著外部環境變動而變化。也正是因為這種特性給設計性能更好的調速系統帶來了很大的困難。正如很多水電行業的專家認為,水電站中關鍵設備之一就是調速器。最近十幾年水輪機調速器控制方法已經有很多種探討,總的來說可以分為兩類[3]。一類就是比例、積分、微分型(PID)調速系統;另一類就是狀態反饋或者稱為智能型調速系統(IC)。經典PID調速系統著重于系統輸出量,根據當前時刻的誤差量(P)、誤差累積量(I)以及誤差的變化速率(D)來調整控制輸入量。該方法丟失了該系統內部信息,現代控制理論不僅利用輸出量信息,而且把系統內部狀態作為參考從而更好地達到對輸出量理想的控制效果。隨著智能控制理論的發展,如預測控制、智能控制、魯棒控制等[1-3],這些控制技術逐漸應用于水輪機調速系統。
滑模控制(SMC)是一種變結構控制(SVC),是一種利用切換頻率很快的開關控制策略來對動態的非線性系統完成非線性反饋控制方法[4]。滑模控制最大的優點在于它有很好的魯棒性。對于水輪機調速器抗干擾性能方面有很大改善。但是,“抖振”問題一直是單一滑模控制的最大缺點。本文將模糊控制和滑模控制相結合,不但解決了該問題,而且使調速系統對干擾和參數變化具有很好的魯棒性。
2 水輪機調節系統數學模型
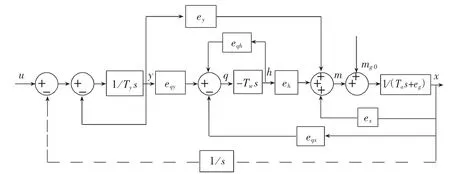
圖1 水輪機調節系統框圖
如圖1所示為某一水輪機組系統單機帶孤立負荷時的框圖,該系統主要由電液隨動系統、引水系統、水輪機系統、發電機、電網等組成。在小波動情況下可用線性模型來分析其結構。圖1中u為控制輸入信號,h為水頭相對偏差值,x為轉速相對偏差值,y為接力器行程相對偏差值,q為流量相對偏差值,mt為水輪機主動力矩相對偏差值,mg0為負載擾動,Ty為接力器時間常數,Ta為發電機轉動慣量時間常數,Tw為水擊時間常數,eg為發電機負載自調節系數,s為拉普拉斯算子,其他水輪機傳遞函數因子。
電液隨動系統傳遞函數[5]為:

水輪機及引水系統函數[5]為:
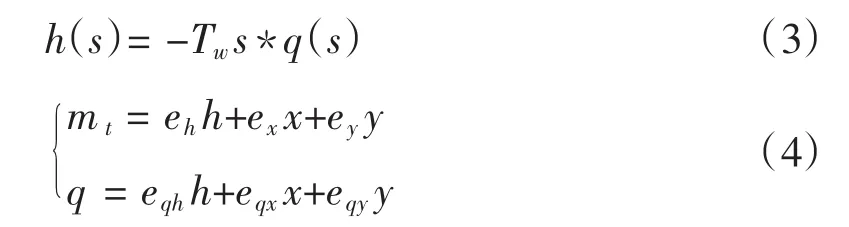
發電機與及電網傳遞函數[5]為:

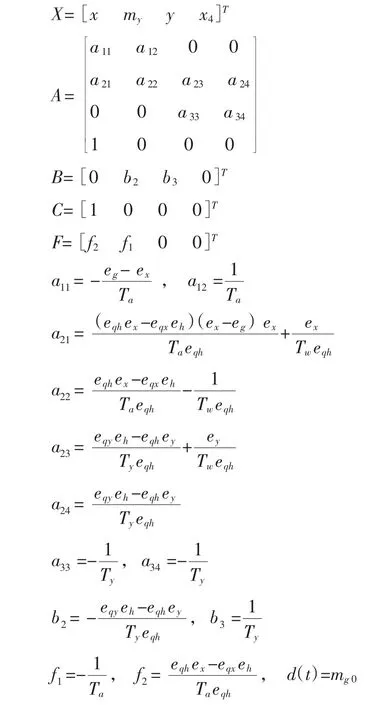
選 x、mt、y 分別為狀態變量x1、x2、x3,另外增加一個附加變量x4[6],且x4定義如下:

則由以上可知系統狀態方程為:
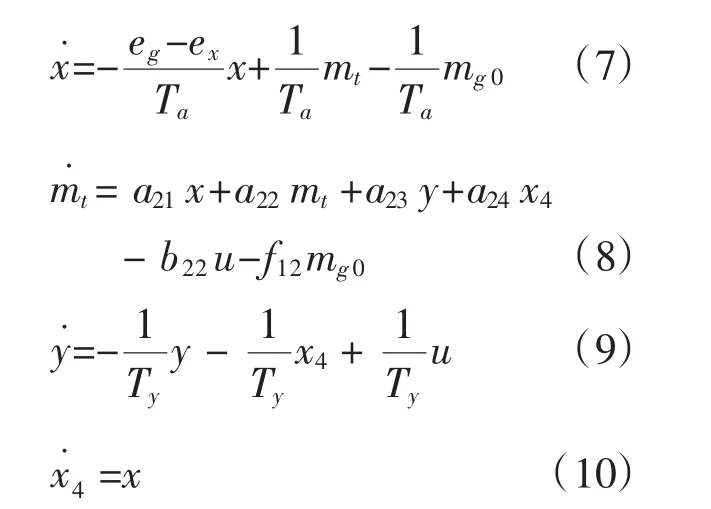
寫成矩陣方程

其中
3 滑模控制器設計
一般而言,滑模控制由兩部分組成:開關控制和等效控制[7]。其中開關控制可使系統狀態量向一個特定面滑動,等效控制則保證系統狀態量始終在該滑模面上運動,并且最終漸進穩定。定義控制量u為:

其中:usw為開關控制,ueq為等效控制。
首先,定義一個滑模面s,如下式所示:

當系統狀態滑向滑模面時,只有等效控制ueq作用,讓S對時間t的導數為零,可得:

聯合式(11)可得:

為了滿足式(13),定義Lyapunov函數為:

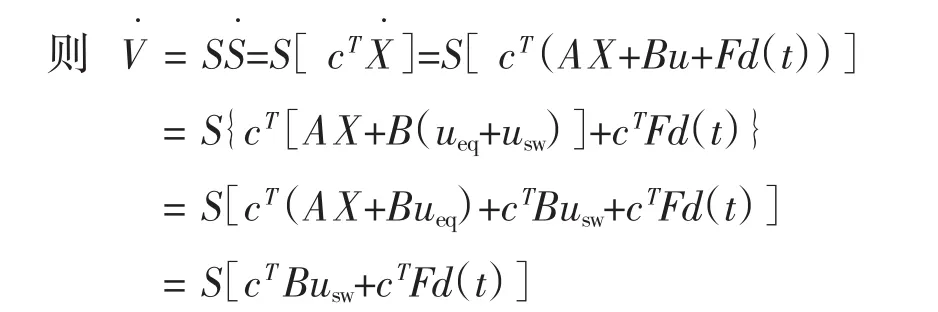
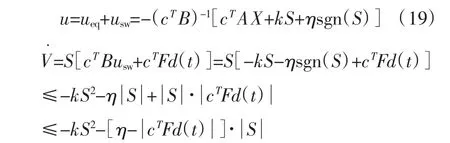
令cTBusw=-kS-ηsgn(S),這里k和η是正常數,sgn(·)是符號函數,則

則控制量u為:
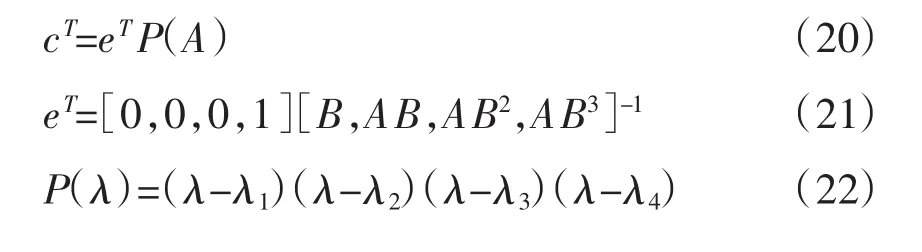
由Ackermann公式[4]可得:由于n=4,則 λ1=-1,λ2=-2,λ3=-3,λ4=-4,從而可計算出cT,滑模控制器設計完畢。
4 模糊控制接口系統設計
由文獻[4]可知,模糊滑模控制能夠消除或減弱常規滑模控制器中因 k固定時引起的“抖振”問題。由滑模存在條件為:設計如下模糊系統:選系統輸入,△k為系統輸出,模糊系統規則庫定義如下:

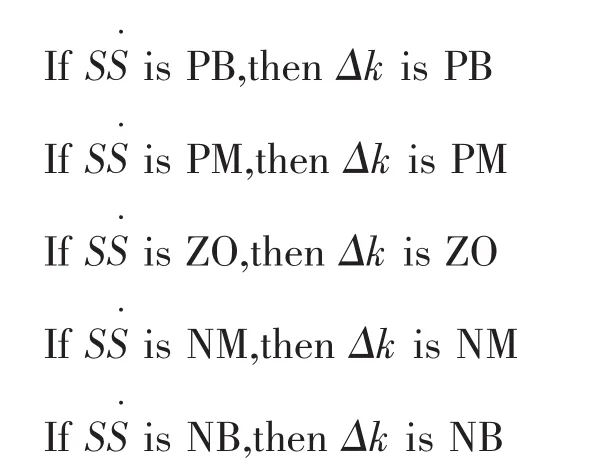
其中:PB、PM、ZO、NM、NB分別表示負大、負中、零、正中、正大。
模糊輸入、輸出隸屬函數分別如圖2、3所示。
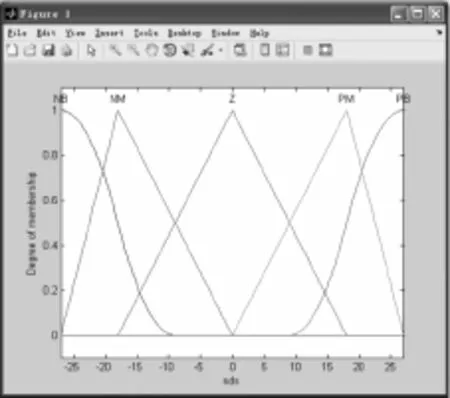
圖2 模糊輸入的隸屬函數
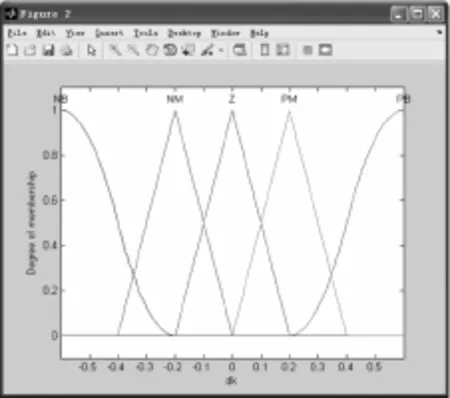
圖3 模糊輸出的隸屬函數
由模糊控制系統整定后的k定義為:

由于k為正常數,△k的論域為[-0.6 0.6],故k0≥1.2。
5 系統仿真結果
針對某一水電站的水輪機調速系統參數在單機帶負荷的情況下,應用Matlab仿真。其參數如下表1所示。
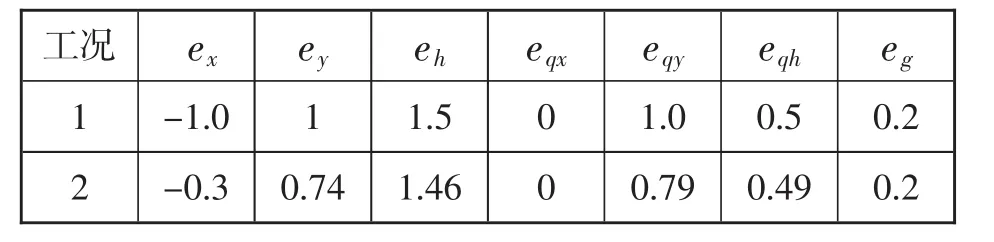
表1 參數表

為了節省仿真算法時間,取η=0.2,在負載擾動為10%的情況,工況一時各狀態變量與控制輸入u的曲線如圖4所示,工況二時各狀態變量與控制輸入u的曲線如圖5所示。
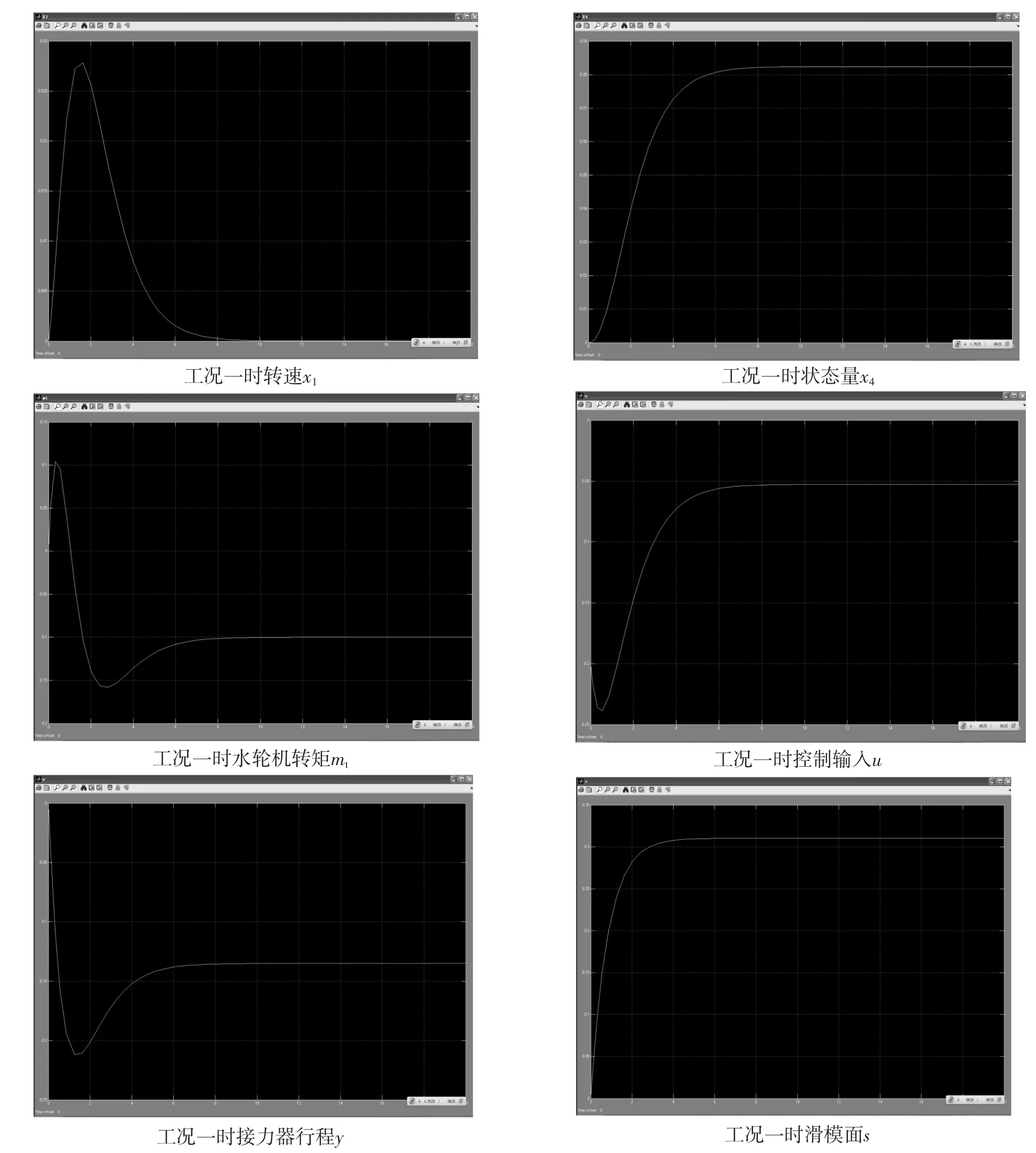
圖4 工況一:負載擾動為10%時曲線
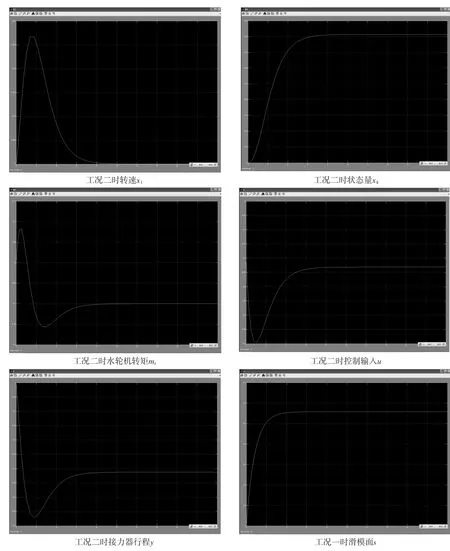
圖5 工況二:負載擾動為10%時曲線
6 結論
本文提出一種基于滑模控制的水輪機調速方法,并利用模糊控制系統對滑模控制引起的“抖振”問題進行了探討。通過對某一水電站水輪機在兩種不同工況時的數據進行Matlab仿真,結果表明該方法在水輪機調速控制方面的可行性,且具有魯棒性。
[1] H Q Fang,L Chen,N Dlakavu,Z Y Shen.Basic Modeling and Simulation Tool for Analysis of Hydraulic Transients in Hydroelectric Power Plants[J] .IEEE Transactions on Energy Conversion,2008,23(3):834-841.
[2] 沈祖詒.水輪機調節[M] .北京:中國水利水電出版社,2001.
[3] Jones D,Mansoor S.Predicttive Feedforward Control for a Hydroelectric Plant[J] .IEEE Transactionns on Control Systems Technology,2004,12(6),956-965.
[4] 劉金琨.滑模變結構Matlab仿真[M] .北京:清華大學出版社,2005.
[5] 魏守平.現代水輪機調節技術[M] .武漢:華中科技大學出版社,2002.
[6] W Tan,Z Xu.Robust analysis and Design of Load Frequence Controller for Power Systems[J] .Electric Power Systems Research,2009,79(5):846-853.
[7] 姚瓊薈等.變結構控制系統[M] .重慶:重慶大學出版社,1997.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
山東青年(2016年1期)2016-02-28 14:25:25
電力工程技術(2014年1期)2014-03-20 14:19:06
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37
