基于單片機的遠紅外烘干機溫度控制系統設計
2013-09-25 01:49:26王其利李宗玉欒新強
電氣傳動自動化 2013年2期
王其利,李宗玉,欒新強
(1.山東鋁業第二工程公司,山東淄博 255000;2.山東水利職業學院,山東日照 276826;3.濰柴動力股份有限公司,山東濰坊 261000)
1 引言
溫度測控技術包括溫度測量技術和溫度控制技術兩個方面。近年來,溫度檢測在理論上發展比較成熟,但在實際測量和控制中,如何保證快速實時地對溫度進行采樣,確保數據的正確傳輸,并能對所測溫度場進行較精確的控制,仍然是目前需要解決的問題。目前國內溫控儀表的發展,相對國外而言在性能方面還存在一定的差距,它們之間最大的差別主要在控制算法方面,國內溫控儀在全量程范圍內溫度控制精度比較低,自適應性較差。這種不足的原因是多方面造成的,如針對不同的被控對象,由于控制算法的不足而導致控制精度不穩定。溫度控制技術按照控制目標的不同可分為兩類:動態溫度跟蹤與恒值溫度控制。動態溫度跟蹤實現的控制目標是使被控對象的溫度值按預先設定好的曲線進行變化。在工業生產中很多場合需要實現這一控制目標,如發酵過程的溫度控制,化工生產中的化學反應溫度控制,冶金工廠燃燒爐中的溫度控制等;恒值溫度控制的目的是使被控對象的溫度恒定在某一給定數值,且要求其波動幅度(即穩態誤差)不能超過某允許值。本文所討論的基于單片機的遠紅外烘干機溫度控制系統就是要滿足遠紅外烘干箱中溫度控制的要求,實現對溫控箱的恒值溫度控制。
2 遠紅外烘干機溫控系統組成
遠紅外烘干機與普通烘干機在結構上的區別主要是:前者將遠紅外輻射元件布置在爐膛內部,以熱輻射加熱為主,對流為輔,利用輻射對受烘干物直接加熱;普通烘干機將熱源置于爐膛之外的加熱介質,利用對流熱風循環為主。
本文所述遠紅外烘干機是用來烘干各種蔬菜、糧食等,達到便于儲存目的的裝置。烘干機采用箱式結構,將遠紅外輻射器布置在爐膛內部,以輻射加熱為主,對流為輔,利用輻射對受熱物直接加熱。在加熱過程中受熱物料是緩慢運動的。此烘干裝置的加熱系統采用了先進的遠紅外輻射傳熱技術,加熱元件使用了遠紅外乳白石英加熱管。遠紅外烘干機共有2個烘干箱,4個溫區,而因箱體較大,則每個溫區又應分為兩個區域進行控制,即要對整個烘干機分為8個區域來進行溫度測量和控制,各個區域溫度測量和控制的原理完全相同。在烘干過程中,箱體內的溫度控制,測溫范圍0℃~125℃,控制精度1℃,功率單層約為50kW。基于以上的各種要求,設計了此溫度控制系統,以便滿足烘干機所要求的溫度范圍,及其精度。
本文所設計的溫度控制系統硬件按功能大致可以分為以下幾個部分:單片主控模塊、輸入通道、輸出通道、報警電路等。硬件總體結構框圖如圖1所示。由結構框圖可見,溫度控制系統以單片機為核心,并擴展外部芯片構成主控模塊。溫控箱的溫度通過溫度傳感器檢測并轉換成微弱的電壓信號,再通過8位的A/D轉換器轉換成數字量。此數字量經過數字濾波之后,一方面將溫控箱的溫度通過控制面板上的液晶顯示器顯示出來;另一方面將該溫度值與設定的溫度值進行比較,根據其偏差值的大小,采用PID控制算法進行運算,最后通過控制雙向晶閘管控制周期內的通斷占空比(即控制溫控箱加熱平均功率的大小),達到對溫控箱溫度進行控制的目的。如果實際測得的溫度值超過了系統給定的極限安全溫度,報警電路會做出反應,保護溫控箱。
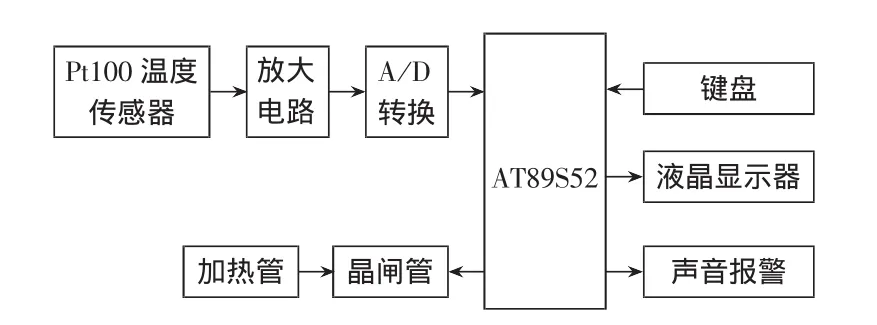
圖1 硬件總體結構框圖
根據本系統實際情況綜合考慮,溫度控制系統選用AT89C52單片機作為主控模塊的核心芯片。溫度控制系統的硬件部分包括:單片機89S52、I/O芯片8155H、PT100溫度傳感器、運算放大器OP07、放大器 INA118、A/D 轉換器 ADC0809、電壓基準芯片MC1403D、晶閘管輸出電路、鎖存器74LS374、液晶顯示器 OCMJ4×8C、鍵盤、報警輸出電路、直流穩壓電源模塊。
3 溫度控制系統電路設計
3.1 電源電路
系統所用直流電源由三端集成穩壓器組成的串聯型直流穩壓電源提供。設計中選用了LM7805三端集成穩壓器,提供+5V、輸出電流為IA。LM78O5的連接方法是變壓器將220V的市電降壓后再通過整流橋整流之后,采用大容量的電解電容進行濾波,以減小輸出電壓紋波。由于電解電容器在高頻下工作存在電感特性,對于來自電源側的高頻干擾不能抑制,因此在整流電路后加入高頻電容改善紋波。電源電路如圖2所示。
3.2 溫度傳感器與單片機接口電路
溫度傳感器的種類比較繁雜,各種不同的溫度傳感器由于其構成材料、構成方式及測溫原理的不同,使得其測量溫度的范圍、測量精度也各不相同。因此在不同的應用場合,應選擇不同的溫度傳感器。Ptl00型鉑電阻,在-200℃到850℃范圍內是精度最高的溫度傳感器之一。與熱電偶、熱敏電阻相比較,鉑的物理、化學性能都非常穩定,耐氧化能力很強,離散性很小,精度最高,靈敏度也較好。這些特點使得鉑電阻溫度傳感器具有信號強、精度高、穩定性和復現性好的特點。由于在本系統中,測溫范圍較大(室溫到600℃之間),且要求檢測精度高、穩定性好,因此選用Pt100鉑電阻作為本溫度控制系統的溫度傳感器。熱電阻與單片機接口電路包括恒流源電路、電壓放大、A/D轉換接口電路。A/D轉換電路選用CMOS單片型逐次逼近式A/D轉換器ADC0809,恒流源電路如圖3所示,放大電路如圖4所示。
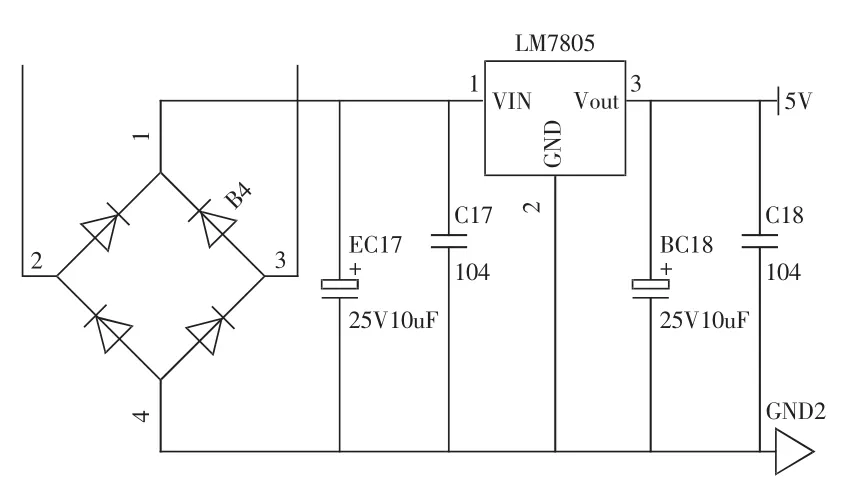
圖2 電源電路圖
3.3 晶閘管與單片機接口電路
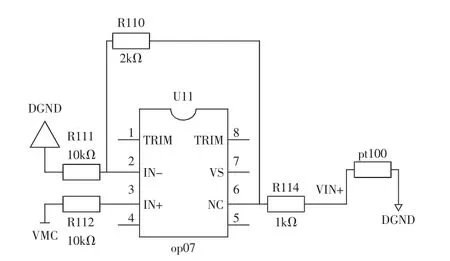
圖3 恒流源電路
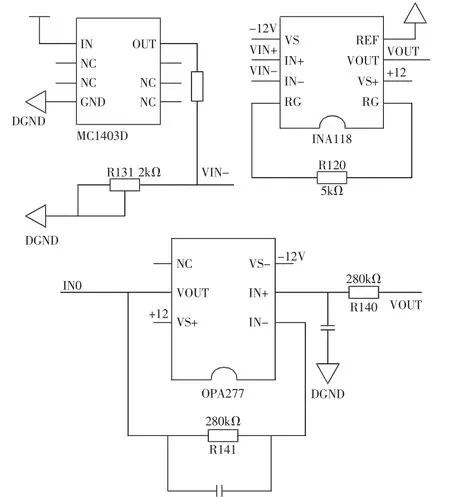
圖4 電壓放大電路圖
目前多數溫控系統均采用晶閘管來實現功率調節。晶閘管的控制模式有兩種:相位控制和零位控制(分配式零位控制、時間比例零位控制)。本系統采用分配式零位控制的模式,控制溫控箱加熱電阻的平均加熱功率,進而控制溫控箱的溫度,晶閘管配套使用的是MOC3061光電耦合雙向晶閘管驅動器,與一般的光耦合器件不同之處是MOC3061輸出部分是硅光敏雙向晶閘管,還帶有過零觸發檢測器,以保證電壓接近零時觸發晶閘管正常。晶閘管輸出電路如圖5所示。
3.4 加熱管控制電路
單片機通過晶閘管控制加熱管,加熱管控制電路如圖6所示。
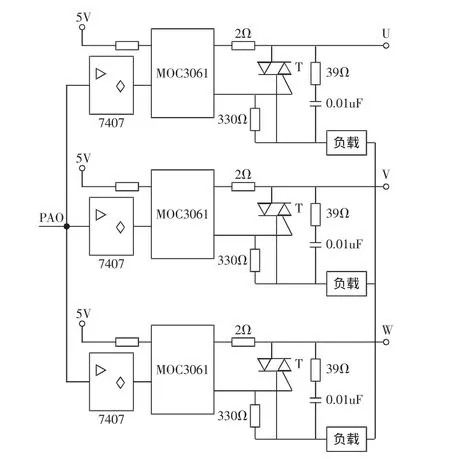
圖5 晶閘管輸出電路
4 溫度控制系統軟件的設計
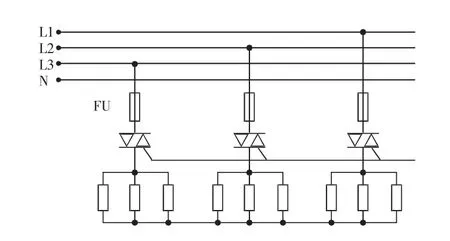
圖6 加熱管控制電路
4.1 主程序的設計
主程序對系統進行初始化,構建系統整體軟件框架,初始化包括對單片機的初始化、A/D芯片初始化和串口初始化等。然后等待溫度設定,若溫度已經設定好了,判斷系統運行鍵是否按下,若系統運行,則依次調用各個相關模塊,循環控制直到系統停止運行。主程序的程序流程圖如圖7所示。
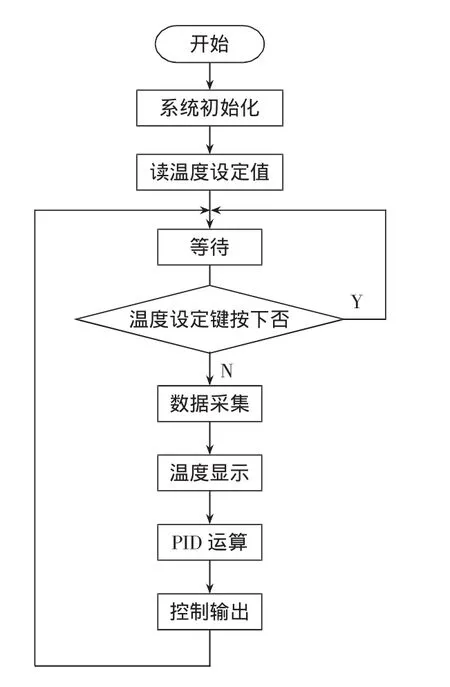
圖7 主程序流程圖
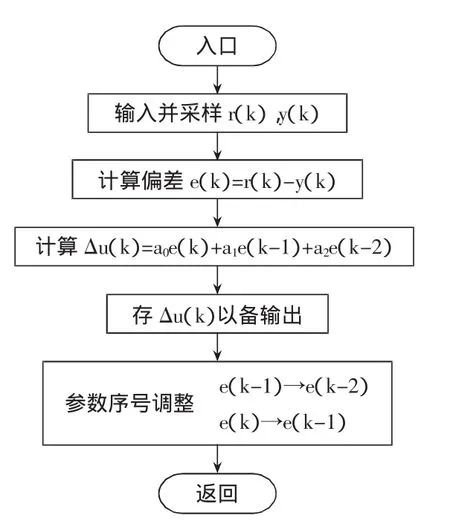
圖8 增量式PID控制算法程序流程圖
4.2 溫度控制系統控制方案
PID控制是最早發展起來的控制策略之一,盡管有許多先進的控制方法不斷推出,但由于PID控制方法結構簡單、魯棒性好、可靠性高、參數易于整定;P、I、D控制規律各自成獨立環節,可根據工業過程進行組合;PID控制方法使用的時期較長,控制工程師們已經積累了大量的參數調節經驗。因此,PID控制器在工業控制中仍然被廣泛地應用著。
增量式PID控制算法與位置式控制算法比較,有以下一些優點。
(l)位置式算法每次輸出與整個過去狀態有關,容易產生較大的累計誤差。而增量控制算法只須計算增量,算式中不需要累加,控制增量的確定僅與最近幾次偏差采樣值有關,當存在計算誤差或者精度不足時,對控制量的影響較小,且較容易通過加權處理獲得比較好的控制效果;
(2)由于計算機只輸出控制增量,所以誤動作影響小,而且必要時可以用邏輯判斷的方法去掉,對系統安全運行有利;
(3)手動/自動切換時沖擊比較小。
鑒于以上優點,本系統的控制算法采用增量式的PID控制算法。其程序流程如圖8所示。
5 結論
溫度控制在工業生產中起著非常重要的作用。本文完成了基于單片機的溫度控制系統的開發,試驗表明,該系統控制方法采用PID算法,結構簡單、魯棒性好、可靠性高、參數易于整定,P、I、D 控制規律各自成獨立環節,可根據工業過程進行組合;該系統根據不同區域的溫度要求進行控制,可以滿足烘干過程中的溫度控制的需要,溫度控制精度較高,自適應性較好。該系統經改裝可用于許多工業上需要溫度控制的場合,具有重要的市場價值和現實意義。
[1]潘新民,王燕美.微型計算機控制技術[M].北京:電子工業出版社,2003.
[2]孫育才.MSC-51系列單片機及應用[M].東南大學出版社,2004.
[3]李玉峰,霓虹霞.MSC-51系列單片機原理與接口技術[M].北京:人民郵電出版社,2004.
[4]譚健成.新編電機控制專用集成電路與應用[M].北京:機械工業出版社,2005.
[5]方程運.工廠電氣控制技術[M].北京:機械工業出版社,2002.
[6]王海寧.基于單片機的溫度系統設計[D].合肥工業大學控制理論與控制工程系.2008.
[7]胡壽松.自動控制原理[M].北京:國防工業出版社,2000.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
