基于靈活度考慮的棉花異纖分揀機器人結構參數優化設計
2013-09-27 09:13:00沈丹峰張華安葉國銘王貫超
紡織學報 2013年2期
沈丹峰,張華安,葉國銘,王貫超
(1.西安工程大學 機電工程學院,陜西 西安 710048;2.上海華迪機械有限公司,上海 201602;3.東華大學 機械工程學院,上海 201620)
近10年來,棉花異纖檢測技術有了較大的發展,檢測成功率有的已達80%[1-3]。現有異纖清除設備多數在紡紗工序中使用,如在清梳工序或絡筒工序,這使紡紗流程復雜化,且需要進行相應設備改造。具有靈活移動特性的棉花異纖分揀機器人由于其作業空間小,無需更改現有紡紗流程而受到重視。在棉花異纖檢測中,機器人的作用是實現棉花的抓取和分類堆放,其異纖檢測通過藏于體內的傳感器完成。通常,將棉包通過開棉機開松,開松的棉花堆放在堆棉臺上,由于棉纖維的相互纏繞與松軟,棉堆具有不確定的形狀,需要制定出最佳抓取路徑。相應地,機器人末端執行器應具有較好的靈活性,以滿足不同抓取路徑的要求。
在工作有限的空間,采用靈活度高的機械結構是選擇機器人機構需要考慮的一個重要因素,不同的關節轉角和機械臂長度會影響機器人末端執行器的靈活度。較多的關節具有較大的靈活度,但這也會帶來控制的復雜化。采用數值或幾何的方法針對不同應用領域的機器人構型來求解其靈活工作空間是目前多數研究者選用的方法[4-5]。本文從棉花抓取需要出發,介紹了一種五自由度棉花異纖分揀機器人結構,分析了機器人的工作空間及其靈活性,并提出基于靈活度考慮的結構參數優化方法,最后通過模擬實驗驗證機器人的靈活性滿足抓取要求。
1 機器人運動學
1.1 機器人結構
設定棉花異纖分揀機器人基本工作條件如下:1)機械手一次抓取棉花質量小于0.5 kg;2)棉纖維屬于軟體物質,機器人重復抓取精度要求不高;3)棉花堆放在尺寸為2 m×2 m×0.3 m的堆棉臺上。
根據上述要求,結合通用關節機器人的常用結構,設計出機器人機體結構。
1)選擇關節型機械臂,包括腰部、大臂、小臂3部分。其動作靈活,工作空間大,占地面積小。
2)為減小機械臂尺寸與質量,在腰部增加升降機構,在垂直方向增加作業空間。
3)在小臂添加伸縮關節,此關節擴大抓取空間。
4)為了能夠讓棉團由腕部吸入,同時降低機器人的控制難度,機械手腕部無自由度。
5)采用四輪小車,移動靈活。
棉花異性纖維分揀機器人結構示意圖如圖1所示[7]。
選用五自由度串聯關節型機械手 PRRRP,3個關節是轉動副,2個關節是移動副。通常,棉包中的棉花擠壓密實,需要經過開棉機開松后才能由機器人末端執行器7抓取,末端執行器根部開有吸棉孔,將抓取的棉花通過小臂6、大臂5、腰部4中的內置孔吸入到收集袋2,在小臂和大臂的棉流通道處安裝有傳感器,用于識別異性纖維。若發現異性纖維,則將該棉花歸為含異性纖維棉團,通過機械臂內置孔中的導向閥收集到收集袋中;若未發現異性纖維,則將該棉團導出到正常棉堆中。這樣經過分揀后,人工只需處理收集袋中的棉團,可大大降低工作量。
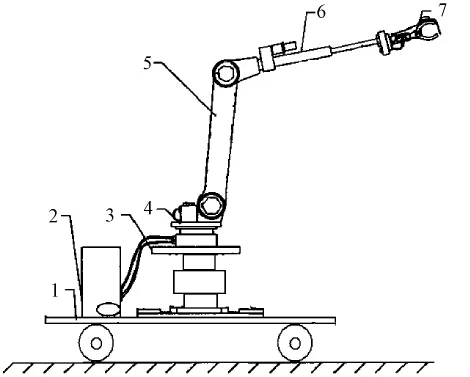
圖1 機器人示意圖Fig.1 Robot schematic diagram
1.2 運動學方程正解
機器人末端執行器在機器人基坐標系中的位姿可用Denavit和Hartenberg提出的桿件坐標系的矩陣方法表示[6],棉花異纖分揀機器人的桿件 D-H坐標系如圖2所示。
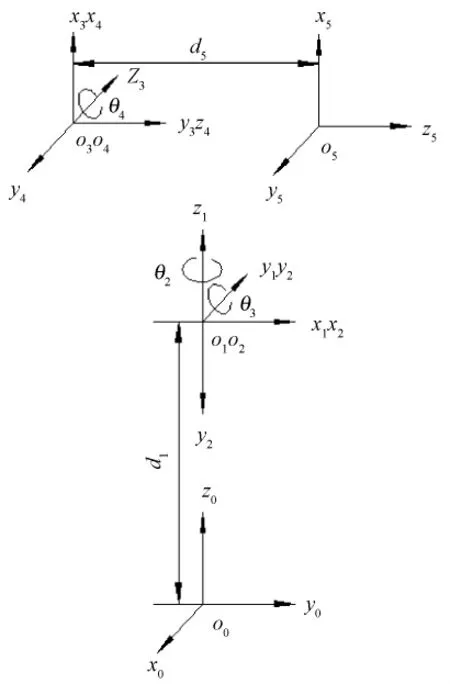
圖2 機器人D-H坐標系Fig.2 D-H coordinate system of robot
機器人的結構參數見表1。di為移動變量,θi為第i個關節的關節轉角,ai為第 i個桿件桿長,γi為第i個關節與第i-1個關節的夾角。各關節變量的邊界約束可采用作圖法獲得。
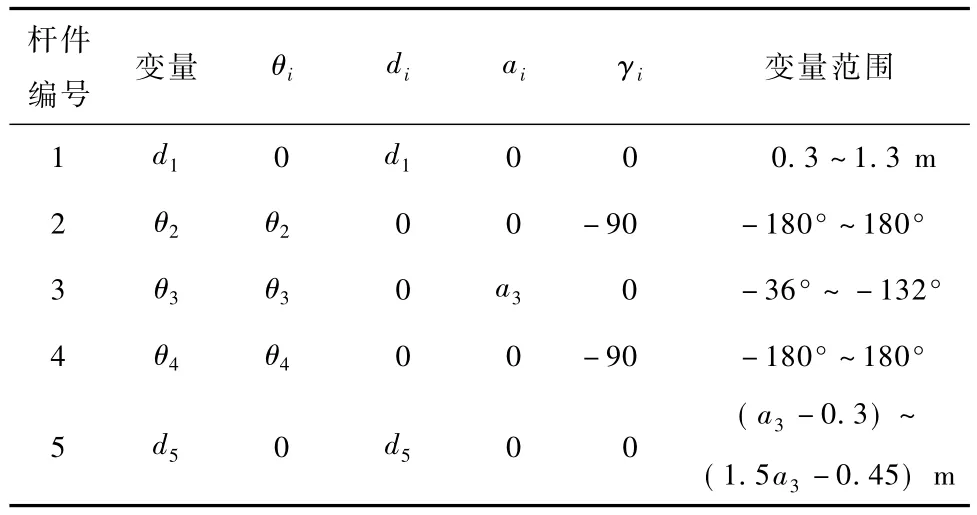
表1 機器人D-H參數Tab.1 D-H parameters of robot
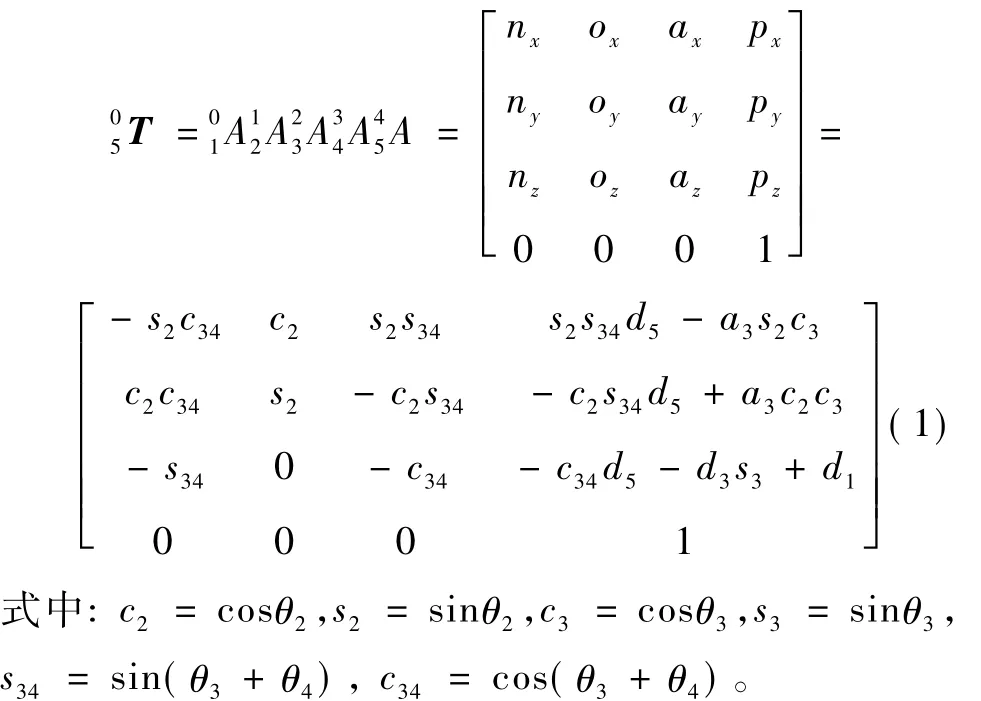
通過坐標系的依次平移與旋轉,可以獲得各桿件坐標系之間的變換矩陣Ai,將各個變換矩陣相乘得到末端執行器相對于基坐標的位姿。由相鄰桿件的D-H參數得到的機器人末端執行器相對基坐標系的變換矩陣為
1.3 運動學方程逆解
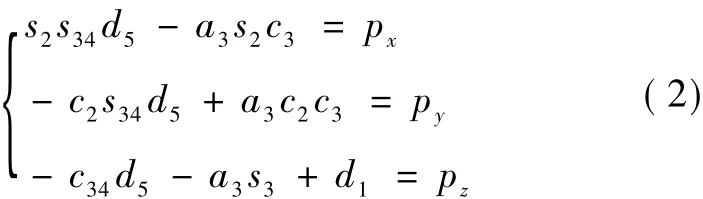
機器人的關節變量(d1,θ2,θ3,θ4,d5)可通過機器人逆運動學方程求解得到,由機器人桿件坐標系可知,機器人末端執行器的位置可用末端執行器姿態矩陣中的方向向量p表示,因此,機器人的軌跡控制需要通過該向量反求關節變量,方程可以簡化為
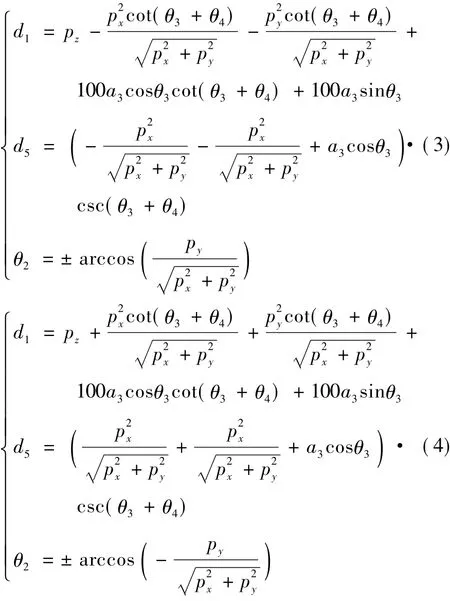
該方程組由3個方程構成,含有6個未知量,能達到該位置的機器人姿態存在自由解,不考慮抓取姿態,該機器人屬于冗余結構,存在多解。假定自由變量是 d3、θ3和 θ4,根據該方程,當自由變量取為確定值時,剩余 3個關節變量會有 4組解,如式(3)、(4)所示。
2 工作空間與靈活性
2.1 工作空間分析
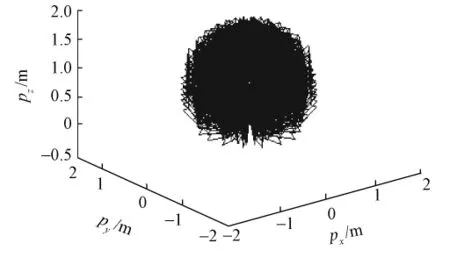
圖3 末端執行器工作空間Fig.3 Work space of end effector
采用數值法計算機器人的抓取空間。根據機器人機械臂的結構尺寸,將各關節變量在其運動限位范圍內離散化,運用機器人的正運動學方程解遍歷離散化后的所有組合得到機器人末端位置坐標即是工作空間,見圖3。
2.2 靈活性分析
腕部無自由度的棉花異纖分揀機器人要求在棉堆空間內具有足夠的靈活性以滿足多方位的抓取動作。由機器人逆運動學公式可看出,1個確定的末端位置矩陣對應若干組關節變量。當關節變量的值超出運動范圍時,則該位姿不能實現。機器人末端執行器在工作空間內所能實現的姿態越多,機器人靈活性就越高。以抓取點 P坐標(0.3,0.3,1)為例,考慮到關節運動精度,對自由變量在工作范圍內以間隔1°遍歷所有解,有303組關節變量能夠滿足。然而,棉花異纖分揀機器人的抓取動作是由抓取點要求的位姿決定的,即末端執行器要以一定的姿態達到抓取點,通常,取D-H坐標系變換矩陣中的導航向量a作為考核靈活性的指標,即在抓取點能夠有多少種姿態到達。
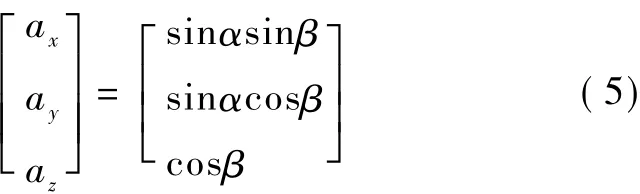
將機器人末端執行器的手指看作空間向量,為描述手指的靈活度,引入服務球和服務區的概念[9-10],如圖 4 所示。
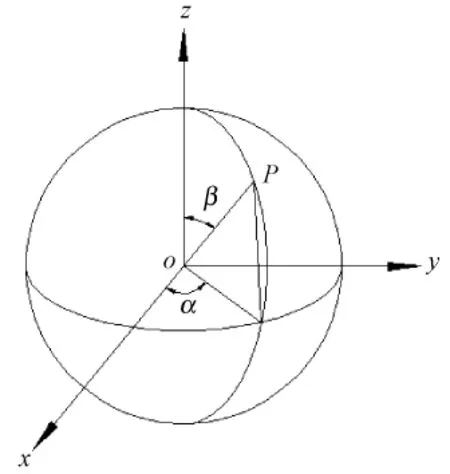
圖4 服務球Fig.4 Service ball
服務球是以指尖為圓心,以單位長度為半徑形成的球。
服務區是服務球上的每點對應1種機器人末端姿態,所有可達點集合組成的區域。
服務區的面積和整個球表面積的比值稱為此圓心點O的靈活度。若將服務球離散化,那么,服務區所包含的離散點數稱為靈活點數,因此,靈活點數越多,靈活度越高。
對半球面上的點進行離散化,用極坐標描述分別對α、β等步距取點,以球面上的點P為姿態向量的起點,球心O為終點,姿態向量PO的表達式為
考慮抓棉動作只能由棉堆外側進入抓棉點。參考基坐標,α和β取值范圍應為[0,π]。
以工作空間內的任意一點分析其靈活性。取點(0.3,0.3,0.6)為例,分析結果見圖5。圖中符號“·”表示能夠實現的姿態,符號“x”表示不能實現的姿態。棉花異纖分揀機器人通過視覺傳感器或人工遠程監控獲得抓取點坐標,通過對此點的靈活性仿真可以輔助操作者或機器人自動選擇最佳抓取姿態。

圖5 機器人空間靈活點仿真Fig.5 Flexible point simulation in robot workspace
3 結構參數優化
為了達到以較小的關節自由度滿足抓取功能要求的目的,提出以靈活點數最大為評價指標的機器人結構參數優化設計。優化方法是以棉堆半剖面為工作面(見圖 6)[7]。
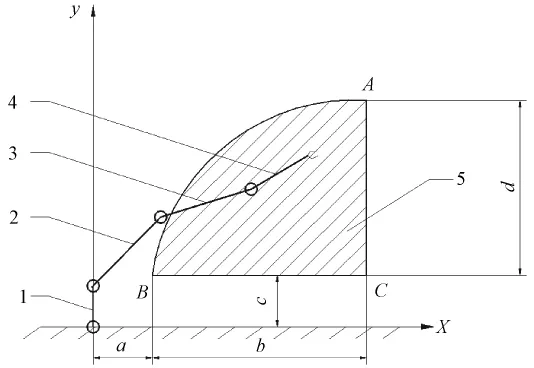
圖6 棉堆半剖面Fig.6 Semi-section of cotton pile
圖中,a=0.2 m,b=1 m,c=0.3 m,d=1 m。由工作空間分析可知,d1、a3、d5是工作空間包絡線的主要影響尺寸。根據仿生學原理,大臂與小臂基本相等,小臂伸縮關節行程為小臂長度的一半,依據抓棉量,確定末端執行器軸向長度為0.3 m,因此,該問題的影響因素就只有d1和a32個變量。已知d1邊界約束為[0.3,1.3],a3邊界約束為[0.54,0.69],其滿足棉堆半剖面所有位置抓取要求。以機器人在棉堆半剖面中抓取點的靈活度最大為目標函數,初始點在可行域內任選,按照機器人關節實際精度遍歷所有抓取姿態,由于按照實際精度進行計算,計算量將會是非常巨大的。為了縮小計算量,將d1精度取為0.1 m,a3精度取為0.02 m,單位球半徑精度取為0.2 m,關節角精度取為10°。以靈活性為優化對象的數學模型為

1)目標函數是在棉堆半剖面內機器人可行姿態的數量,為
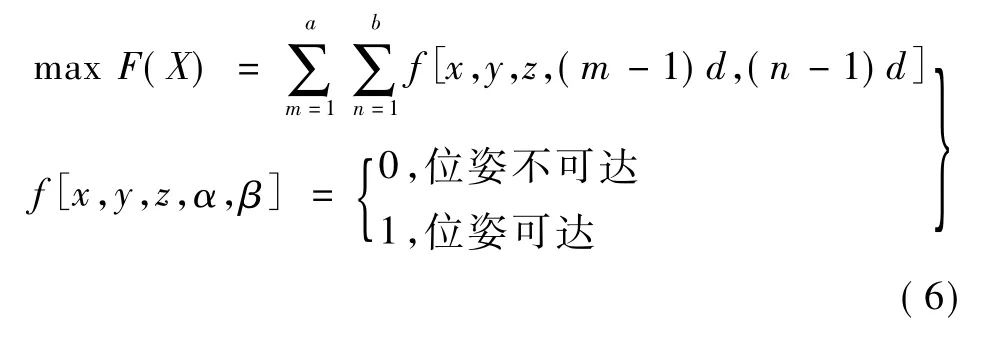
式中:x,y,z為指尖抓取點位置;d 為采樣步長;α,β為末端執行器的姿態;a,b為 α和 β在區間[0,180°]內以步長d采樣所取的點數。
2)約束條件為
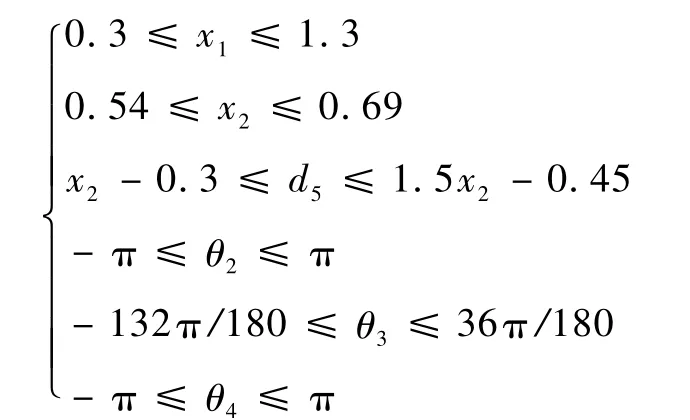
運用MatLab軟件編程優化計算。圖7示出靈活點數結果隨 d1和 a3的變化趨勢。其最優解是x1=1.3 m,x2=0.69 m。即此時具有最大的靈活性,靈活點數為262個,較采用最小機械結構尺寸的靈活度26個高出10倍。可以預見,當采用實際工作精度,其靈活度會更高。
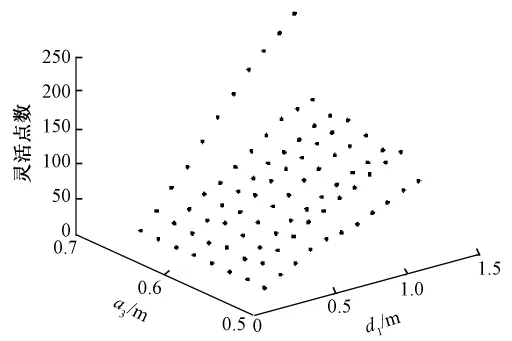
圖7 隨d1和a3變化的靈活點數Fig.7 Flexible points with d1and a3
4 虛擬樣機試驗驗證
采用具有最大靈活點數的關節參數,利用solidworks將機器人的工作空間主剖面旋轉生成三維模型,并與棉堆空間進行對比,如圖8所示。可直觀發現末端執行器工作空間完全覆蓋了一半的棉堆空間,這樣機器人只要通過移動到棉臺另一側即可完成棉堆空間的全覆蓋。
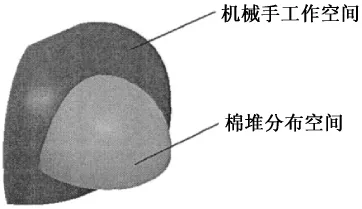
圖8 空間對比圖Fig.8 Space contrast figure
采用ADMAS軟件,將機器人模型導入,在模擬環境下,任取手術空間中的1點,給出此點樣本姿態的范圍,在可達姿態范圍內選擇試驗姿態,并控制機器人實現此姿態,表2示出點(0.5,0.4,0.7)的靈活性試驗數據。根據樣本姿態仿真結果,共有100個姿態能夠達到。選擇5個姿態在ADMAS環境下進行試驗,機器人成功實現了所選姿態。
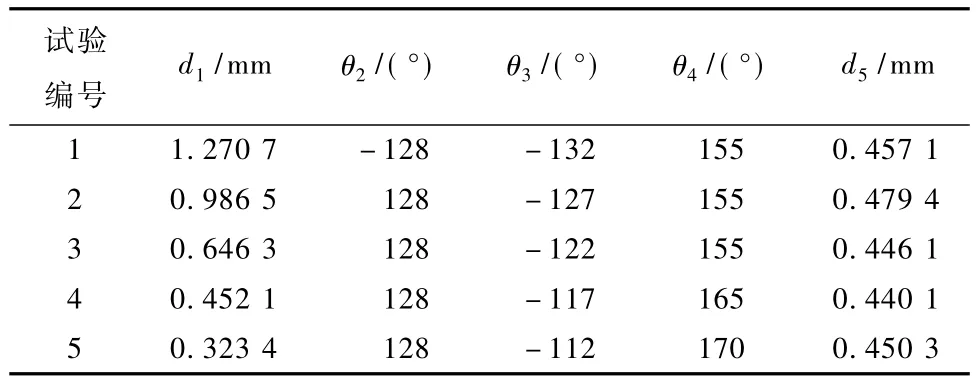
表2 模擬試驗數據Tab.2 Data of simulation test
5 結論
考慮靈活度最大的機器人結構參數的優化方法,使少自由度的機器人能夠獲得一定的姿態冗余,對于降低成本與控制難度都是有益的。針對目標抓取物是對稱的或抓取方向不作要求的設計問題,采用靈活度最優的設計方法可以減少關節數而保證最大的靈活度。其設計方法歸納如下:
1)采用幾何法確定機器人各關節的邊界約束。
2)建立運動學方程,得到位置方程。
3)將位置方程中冗余變量取作自由解,解出剩余變量。
4)在約束域遍歷冗余變量,以確定的抓取空間為對象,統計剩余變量可行解的個數,取可行解最多的關節變量作為最優解。
[1]王季,陸文凱.線陣相機場曲復原及在異纖檢測中的應用[J].光學精密工程,2009,18(9):2116-2121.WANG Ji,LU Wenkai.Restoration of field curved image from line camera and its applications in foreign fiber detecting [J].Optics and Precision Engineering,2009,18(9):2116-2121.
[2]陳志國,須文波.一種機器視覺異纖高速清除系統[J].計算機工程與應用,2010,46(10):199-201.CHEN Zhiguo,XU Wenbo.High-speed foreign fiber detecting and clearing system with machine vision[J].Computer Engineering and Applications, 2010,46(10):199-201.
[3]閻磊,郝愛萍,王志鴻.異纖的危害及清除方法探討[J].棉紡織技術,2012,39(12):772-775.YAN Lei,HAO Aiping,WANG Zhihong.Discussion of foreign fiber harmfulness and elimination method[J].Cotton Textile Technology,2012,39(12):772-775.
[4]LAI Z C,MENG C H.The dexterous workspace of simple manipulators[J].IEEE Journal of Robotics and Automation,1988,4(1):99-103.
[5]黃獻龍,梁斌.分解法求解EMR系統機器人的服務角[J].中國空間技術,2001(4):63-67.HUANG Xianlong,LIANG Bin.Solving the service angle ofEMR system robotwith a decomposing method[J].Chinese Space Science and Technology,2001(4):63-67.
[6]熊有倫.機器人學[M].北京:機械工業出版社,1993:10.XIONG Youlun.Robotics[M].Beijing:China Machine Press,1993:10.
[7]沈丹峰,趙輝,葉國銘.棉花異性纖維分揀機器人總體結構的優化設計[J].東華大學學報:自然科學版,2012,38(3):87-90.SHEN Danfeng,ZHAO Hui,YE Guoming.Optimizeddesign for different fibers sorting robot structure[J].Journal of Donghua University:Natural Science Edition,2012,38(3):87-90.
[8]MAYORQA R V,CARRERA J,ORITZ M M A.Kinematics performance index based on the rate of change of a standard isotropy condition for robot design optimization[J].Robotics and Autonomous Systems,2005,53(3):153-163.
[9]邢宏光,王利宏,張玉茹.神經外科手術機器人靈活性分析[J].北京航空航天大學學報,2004,30(4):312-315.XINGHongguang, WANG Lihong, ZHANG Yuru.Dexterity analysis of robot for neurosurgery[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(4):312-315.
[10]崔建昆.3-RRR平面并聯機器人的靈活工作空間[J].上海理工大學學報,2005,27(4):365-368.CUI Jiankun.On the dexterous workspace of 3-RRR planar parallel manipulator[J].Journal of University of Shanghai for Science and Technology,2005,27(4):365-368.