基于二次曲線的線陣相機標定技術
2013-09-29 05:20:20劉仁峰龔俊斌田金文
計算機工程 2013年1期
關鍵詞:方法
劉仁峰,龔俊斌,田金文
(1.華中科技大學圖像識別與人工智能研究所多譜信息處理技術重點實驗室,武漢 430074;2.中國艦船研究設計中心,武漢 430070)
1 概述
線陣相機由于具有比普通面陣相機更大的視野和更高的精度,在多領域具有很強的實際意義。此外,線陣相機所獲取的1D數據比面陣相機獲取的2D圖像數據更容易運算,速度更快。在許多應用場合,需要對線陣相機進行標定。有些方法需要多條線來進行相機的標定,有些方法需要三維立體靶標進行標定[1],但是立體靶標的制作成本較高,而且加工精度受到一定的限制。
對于面陣相機,目前已經有非常成熟的標定方法[2-4]。線陣相機標定的難點在于尋找成像點與靶標點的對應,因為線陣圖像不能提取角點、線段等特征。本文使用包含多個二次曲線的平面作為靶標,這種靶標制作簡單,而且對圍繞固定軸旋轉的線陣相機具有很好的標定效果。由于這種相機各次成像時光心的相對角度是已知的,因此可以充分利用這些信息設計標定方法。
2 基于二次曲線的線陣相機標定方法
針對繞固定軸旋轉的線陣相機,首先研究如何將多幀線陣圖像排列成面陣圖像;其次,研究如何提取二次曲線并且根據二次曲線求解單應;最后,利用面陣相機的標定方法進行標定,再從面陣相機的參數中提取出線陣相機的參數。
2.1 面陣圖像
面陣相機的成像平面是一個平面,根據射影幾何,二次曲線在面陣相機上的圖像仍然是二次曲線[5-6]。本文研究的待標定系統是繞固定軸旋轉的線陣相機,通過研究它與面陣相機之間的聯系,能夠找到它們所拍攝圖像之間的等效轉換。
圖1示意了面陣相機與繞定軸旋轉的線陣相機。由圖1(b)可見,繞固定軸旋轉的線陣相機的成像面等價于一個圓柱面,因此,二次曲線的成像一般不是二次曲線。但是,通過適當的坐標系轉換將線陣圖像上的點轉化到虛擬的成像平面,從而可以將線陣相機的成像變成二次曲線。
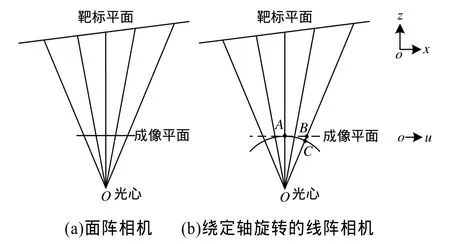
圖1 面陣相機與線陣相機的示意圖
首先,分析投影后u坐標的變換。設通過線陣相機拍攝了 N幀線圖像,每次轉動的角度為w,w是已知的。從1~N之間任選第p幀作為參考幀,例如選擇 p為中間數 p=(N + 1)/2,然后將第i幀線圖像的u坐標定義為:

其中,c為任意正實數。
其次,分析投影后v坐標的變換。需要將各幀線圖像在v0處對齊,并且對各幀進行尺度縮放。圖 2示意了線陣圖像向虛擬成像平面上的投影。其中,點O、A、B、C對應于圖1(b)中的各點,點E是線圖像上的某個點,點D是點E在虛擬投影面上的對應點。
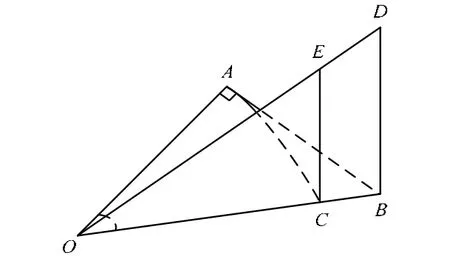
圖2 線陣圖像向虛擬成像平面上的投影
由圖2可得:BD/CE=OC/OB=OA/OB= sec(AOC),BD=CE×sec(AOC)。所以,第i幀線圖像的 v坐標縮放尺度為:
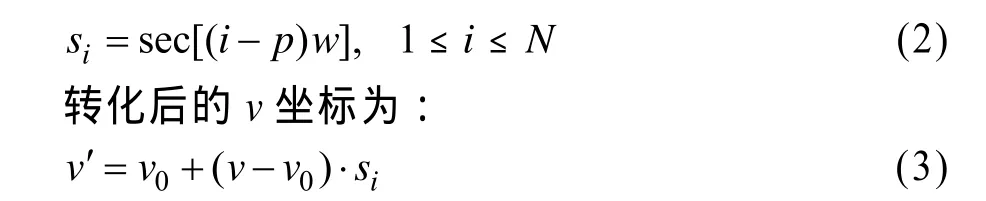
式(1)~(3)給出了將線陣圖像的坐標(i, v)到虛擬面陣圖像的坐標(u′, v′)的轉化方法。將N次成像的v坐標進行適當縮放,并按照相應的u坐標擺放,結果等價于面陣相機。于是線陣相機的標定問題轉換為面陣的標定問題,可以利用面陣相機已有的標定方法。
2.2 基于二次曲線的面陣相機標定
設二維空間中的點記作向量 m =[u ,v]T,三維空間中的點記作向量 M=[X ,Y,Z]T,m和M分別是相應的齊次坐標。攝像機模型采用針孔模型,那么空間點M與圖像點m之間的關系為:

其中,s是尺度因子;[R , t ]稱作相機外參數;A稱作相機內參數。A可以寫成如下矩陣:

其中,(u0,v0)為主點的坐標,α和β分別為圖像 u坐標和v坐標的尺度因子。
文獻[2]提出了一種基于平面模板的相機標定方法。該方法使用平面靶標,只要進行2次或更多次的成像,然后分別計算圖像與靶標之間的單應,就能夠計算出相機的內外參數。使用的特征為角點。文獻[7-8]推廣了這種方法,他們使用二次曲線作為特征,根據二次曲線之間的對應關系求解單應。
本文的方法與文獻[7]的方法類似,但做了如下改進:(1)橢圓擬合,根據二次曲線計算單應分別采用的是文獻[6, 9]的方法。由于這 2個環節都采用了具有閉合解的方法,因此計算效率高。(2)靶標包含非同心的二次曲線,這樣可以消除單應的歧義,并且使得估計的單應更加準確[10]。
2.3 算法的流程
當估計出面陣相機的參數后,可以提取出線陣相機的參數:β是線陣相機的尺度因子,v0是通過光軸在線陣圖像上的坐標。將多幀線陣圖像排列成面陣圖像時,需要用到v0,而v0在標定前是未知的。采用一個梯度下降的方法估計v0。基于二次曲線的線陣相機標定流程如下。
預備工作:
(1)打印一個靶標圖案,圖案中包括3個或更多的二次曲線,將它貼在一個平面上。
(2)改變靶標(或相機)的位置進行 2次或 2次以上成像。每次成像包含N幀線陣圖像,并且相鄰兩幀線陣圖像對應的相機旋轉角度為w。
相機標定的步驟:
(1)令k=0。設置v0的初始值為線陣圖像的中心坐標=L /2,其中,L是線陣圖像像素數目。設置閾值ε和步長l。
(2)對于每次成像,依次做以下工作:
1)將多幀線陣圖像擺放成面陣圖像,見式(1)~式(3)。
2)從面陣圖像中擬合出二次曲線,估計參數[1]。
3)根據二次曲線的參數,求面陣圖像與靶標圖案之間的單應矩陣[6]。
(3)根據步驟(2)求得的多個單應矩陣,求解面陣相機的內參數[2]。
(4) k←k+1。從面陣相機的參數中提取線陣相機的參數 β(k)和v0(k)。
(5)若當前標定的v0值與前一次的標定值相差很小,< ε,則結束。否則,令=+,返回步驟(2)。
3 實驗結果與分析
為了檢驗相機標定算法的有效性,設計了仿真實驗。線陣相機的參數設置如下:α=1 200,v0=511,圖像分辨率是1 024×1像素。相機每次轉動的角度為1.5°,轉動范圍為 45°,因此,相機在某個位置可以進行31幀成像,選擇第16幀作為參考幀。
平面模板包含4個圓,半徑均為95 mm,圓心分別位于(100, 100)、(100, ?100)、(?100, 100)、(?100,?100),單位為mm。靶標平面的方向用三維向量r表示(單位為°);位置由三維向量t表示(單位為mm)。實驗中進行了3次測量,靶標平面的方向與位置分別為:
3.1 線陣圖像的排列
圖3給出了仿真成像的結果。其中,圖3(a)是靶標圖案;圖 3(b)~圖 3(d)是靶標位于 3個不同位置得到的多幀線陣圖像。實心點代表原始的成像點,空心點代表坐標變換后的成像點。可以看出,排列后的面陣圖像可以很好地擬合出橢圓。
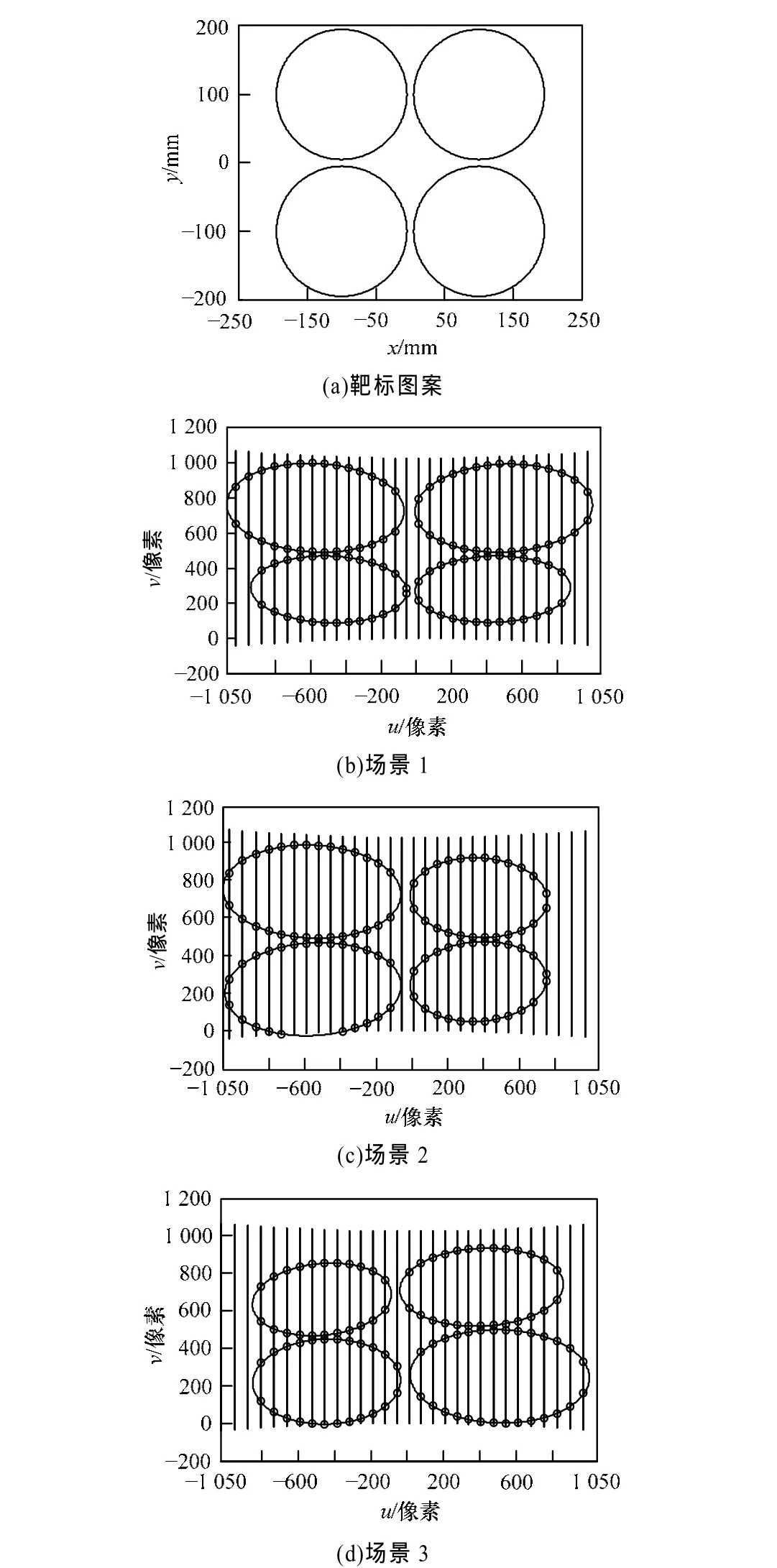
圖3 靶標圖案和仿真成像
3.2 不同隨機噪聲水平下的誤差比較
圖像上相應的投影點位置加上均值為0、均方差為σ的高斯噪聲。將估計的相機參數與真實值比較。使用相對誤差評價α的精度,使用絕對誤差評價v0的精度。均方差σ的變化范圍從0.1像素~1.5像素。對于每個噪聲水平,實驗100次然后取平均值,實驗結果如圖4所示。可以看出,誤差與噪聲水平大致呈線性關系。當均方差σ=0.5時(高于實際中的噪聲水平),α的相對誤差低于 0.4%,v0的絕對誤差低于1.5個像素。可見,本文的標定方法精度較高,且魯棒性較強。
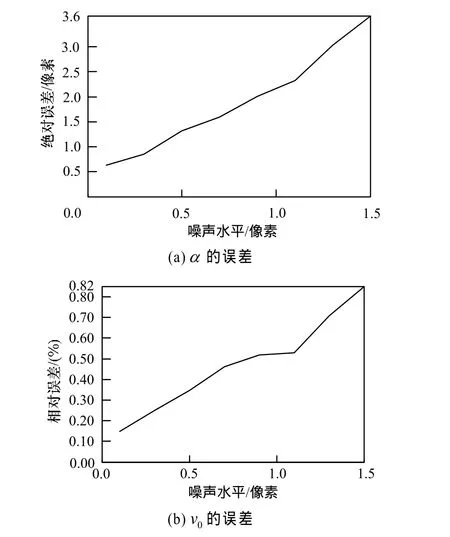
圖4 不同噪聲水平下的誤差
3.3 噪聲條件下的橢圓擬合與單應估計
圖5給出了均方差σ為10個像素時,橢圓擬合與單應估計的結果。圖5(b)畫出了將圖像根據單應映射到靶標上時的情況,靶標圖案和映射后的圖像基本重合,說明單應估計得比較精確。
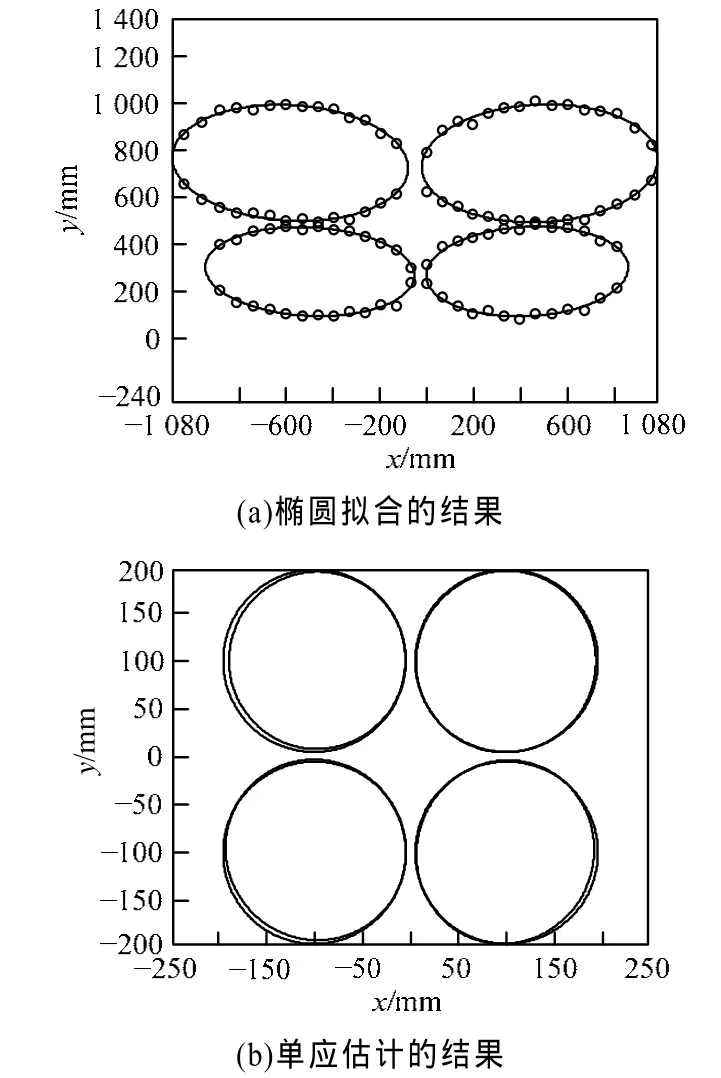
圖5 橢圓擬合與單應估計的結果
4 結束語
針對繞固定軸旋轉的線陣相機,本文提出了一種基于二次曲線的相機標定方法。靶標上的圖案是3個或3個以上的二次曲線。該方法只需要攝像機在2個或2個以上不同的方位拍攝靶標的圖像,相機和靶標平面都可以自由移動。由于二次曲線自身包含有豐富的結構信息,因此二次曲線之間的單應不需要利用點的對應,特別適合線陣相機。
[1]Luna C A, Mazo M, Lázaro J L, et al.Calibration of Line-scan Cameras[J].IEEE Transactions on Instrumentation and Measurement, 2010, 59(8): 2185-2190.
[2]Zhang Zhengyou.A Flexible New Technique for Camera Calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334.
[3]吳福朝, 阮宗才, 胡占義.非線性模型下的攝像機自標定[J].計算機學報, 2002, 25(3): 276-283.
[4]高立志, 方 勇, 林志航.立體視覺測量中攝像機標定的新技術[J].電子學報, 1999, 27(2): 12-14.
[5]Hartley R I, Zisserman A.Multiple View Geometry in Computer Vision[M].2nd ed.Cambridge, UK: Cambridge University Press, 2004.
[6]Kannala J, Salo M, Heikkil? J.Algorithms for Computing a Planar Homography from Conics in Correspondence[C]//Proc.of British Machine Vision Conference.Edinburgh,UK: [s.n.], 2006.
[7]楊長江, 孫鳳梅, 胡占義.基于平面二次曲線的攝像機標定[J].計算機學報, 2000, 23(5): 541-547.
[8]Ying Xianghua, Zha Hongbin.Camera Calibration Using Principal-axis Aligned Conics[C]//Proc.of the 8th Asian Conference on Computer Vision.Berlin, Germany:Springer-Verlag, 2007.
[9]Fitzgibbon A W, Pilu M, Fisher R B.Direct Least Squares Fitting of Ellipses[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 1999, 21(5): 476-480.
[10]Zhao Zijian, Liu Yuncai.Applications of Projected Circle Centers in Camera Calibration[J].Machine Vision and Applications, 2000, 21(3): 301-307.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56