
未來戰斗機控制模式研究
2013-10-11 02:29:54鄭友勝吳家峰
教練機 2013年2期
關鍵詞:能力
鄭友勝,吳家峰
(中航工業洪都,江西南昌330024)
0 引言
美國率先研制并裝備第四代戰斗機,為了繼續擴大自己的空天優勢,已經開始研制第五代戰斗機,俄羅斯也緊隨其后。第五代戰斗機到底是有人駕駛,還是無人機駕駛,目前也是各國爭論的焦點。然而,控制模式作為第五代戰斗機的一項關鍵技術,必須得以突破。本文主要研究了第五代戰斗機的控制模式。
1 國外發展概況以及能力需求
1.1 國外發展概況
美國在裝備第四代戰斗機的同時,也正在積極探索第五代戰斗機[1]。2008年第9期美國《空軍》雜志提出了第五代戰斗機的特點:高超音速、雙模式發動機和自適應的外形。隨后該雜志在2009年第10期中對第五代戰斗機的特點又進行了修正,細化了一些技術特征:超強隱身能力、可能具有“變體”能力、高度網絡化、高度靈敏的傳感器等。目前,美國第五代戰斗機的發展已經由概念探討轉向前期論證,美國空軍在五代機發展問題上已經邁出了實質性步伐,已經成立專門機構開展五代機特征論證[2]。
據俄新網報道,2012年3月21日,俄羅斯航空巨頭米格公司展示了自己的新產品——“電鰩”噴氣式隱形無人機戰斗機。據稱,這種飛機因具備高速、隱身和無人駕駛等特性,被稱為“第六代戰斗機”。其重要用途是突破敵方嚴密的防空系統,發射彈艙內的精確制導彈藥,擊毀預先偵察到的固定目標,也可以擊毀地面目標和海上目標。
1.2 能力需求
第五代戰斗機應具有出色的遠程制空作戰能力和極強的對地、對海攻擊能力,同時應具備高度的自主作戰能力,以奪取制空權、戰略縱深打擊和遠海突擊為主要作戰使命。第五代戰斗機的主要作戰任務包括:防空截擊、護航掩護、防空壓制、對海作戰、戰略縱深打擊、戰場遮斷、電子對抗和偵察/監視等。
另外,從戰斗機的劃分角度分析,第五代戰斗機的綜合作戰能力應該遠超越第四代戰斗機,關鍵技術指標較第四代戰斗機有壓倒性優勢[3],應具備遠程作戰、快速反應、靈活支援的能力;具備防空反導、空降作戰、信息作戰的能力;在飛行速度、隱身性能、傳感器融合、自主控制、飛行空域、生存力、殺傷力和多任務等關鍵能力方面比第四代戰斗機更強。除了一些關鍵能力優于四代機以外,五代機還應該具備反隱身、能量隱身以及激光攻擊和高能微波攻擊等第四代戰斗機所不具備的能力。
2 控制模式
有人曾經大膽預測,第四代戰斗機將是世界上發展的最后一代有人戰斗機了,隨著未來先進無人機技術和無人機作戰平臺的發展,無人作戰飛機很有可能替代有人戰斗機,成為未來作戰飛機的發展主流。現在看來,這一預測可能不會成為現實,就目前的控制技術水平,無人機只能執行單一的對固定目標與低速目標的攻擊任務,對于復雜環境下的目標和高速運動的目標,無人機還無能為力,離完全自主控制還相差甚遠[3]。第五代戰斗機是有人機還是無人機,目前還沒有定論,各國也還在研究中。以下將分別從有人控制、自主控制和有人/自主復合控制等三個方面進行深入研究、分析利弊。
2.1 有人控制模式
第一代戰斗機和第二代戰斗機完全由飛行員操縱和控制,需要飛行員不斷地調整飛機姿態,以保證飛機能夠穩定性飛行。從第三代戰斗機開始,出現的自動控制系統,可以部分代替飛行員的工作,通過自動控制系統實時調整飛機的姿態,使飛機能夠穩定飛行,提高了飛機的操縱性,減輕了飛行員的負擔。隨著飛控技術的不斷發展,越來越多的工作可以由飛控系統完成或起到很好地輔助作用,大大降低了飛行員的操縱負擔。
第四代戰斗機控制系統安全級別很高,配備了多臺計算機,增加了飛機的控制冗余度;另外,即使在所有機載計算機都出現故障的情況下,飛行員還可以手動飛行。第四代戰斗機的控制系統不是簡單的飛行控制,而是“飛行、火力、動力”融合的控制系統。第四代戰斗機的飛控系統高度綜合化[4],體現在信息綜合、顯示綜合、功能綜合、硬件綜合、軟件綜合和檢測綜合等。由于第四代戰斗機采用了更為先進的控制技術和控制理念,將綜合共享的概念移到傳感器部分,更多的功能將由軟件實現,并充分利用信息融合技術,進一步增強了飛行員的態勢感知能力,提高了飛行員的判斷能力,增強了戰斗機的攻擊能力和生存力。
第五代戰斗機將配備先進的飛行管理系統,具有相當高的自主控制能力。五代機控制系統除了四代機已有的控制能力外,還應具備以下能力:
1)更強的綜合信息處理能力;
2)具備故障診斷和超強的自修復能力;
3)很強的信息篩選能力;
4)飛行路線重規劃、飛行任務重規劃、初具規模的協同作戰能力;
5)具備自主起降能力,確定目標類型后可以自動選擇武器發起攻擊,并且攻擊時間大大縮短。
對于第五代戰斗機,飛控系統像是一個能力很強的“助手”,而飛行員則是一個“決策者”和發布命令的“老板”;大多數情況下是戰機的飛控系統來完成操作,飛行員的主要職責是基于復雜環境下多目標的任務決策、重要信息判斷、臨時應變、干擾和程序中斷、嚴重故障等意外情況的處理。裝備更為先進的智能控制系統后的第五代戰斗機,將會大大降低飛行員的操作負擔,簡化操作程序,使飛行員能夠更專注于執行戰斗任務。
2.2 自主控制模式
2.2.1 自主控制相關概念
文獻[6]給出了自主控制的定義,認為自主控制是通過在線感知、信息處理和控制重構等功能,在不確定環境里和無人干涉的條件下,以最優的方式執行控制策略,自主、快速有效地適應環境,實現場景描述、故障檢測、策略規劃、避障控制等功能。自主控制強調自我決策、自我控制,可看作是自動控制的高級發展階段。
美國國防部在 《無人機系統路線圖2005-2030》中公布的自主控制趨勢[5],如圖1所示。
從圖1中可以看出各無人機型號與無人機10個自主控制級別之間的對比關系。由圖可知,自主等級在5以下的,任務相對簡單,可以由單機完成,而自主等級在5以上的任務,需要多機協同完成。目前,美國先進的無人機僅處于等級4~5之間的水平,離完全自主機群的級別還有很大的差距[7]。
為了衡量第五代戰斗機系統的自主水平,需要對自主能力進行合理的等級劃分。文獻[7]在研究美國無人機自主等級的劃分之后,提出了一種新的無人機發展的自主控制等級(表1)。
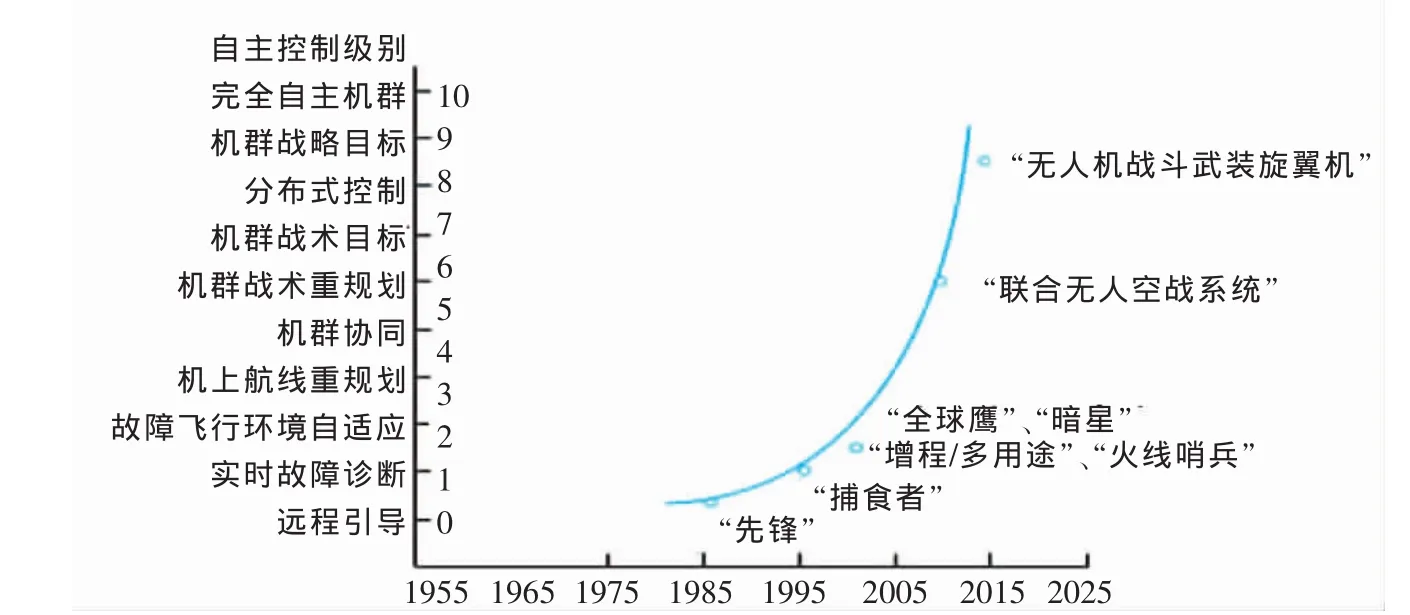
圖1 2005版美國無人機發展路線圖
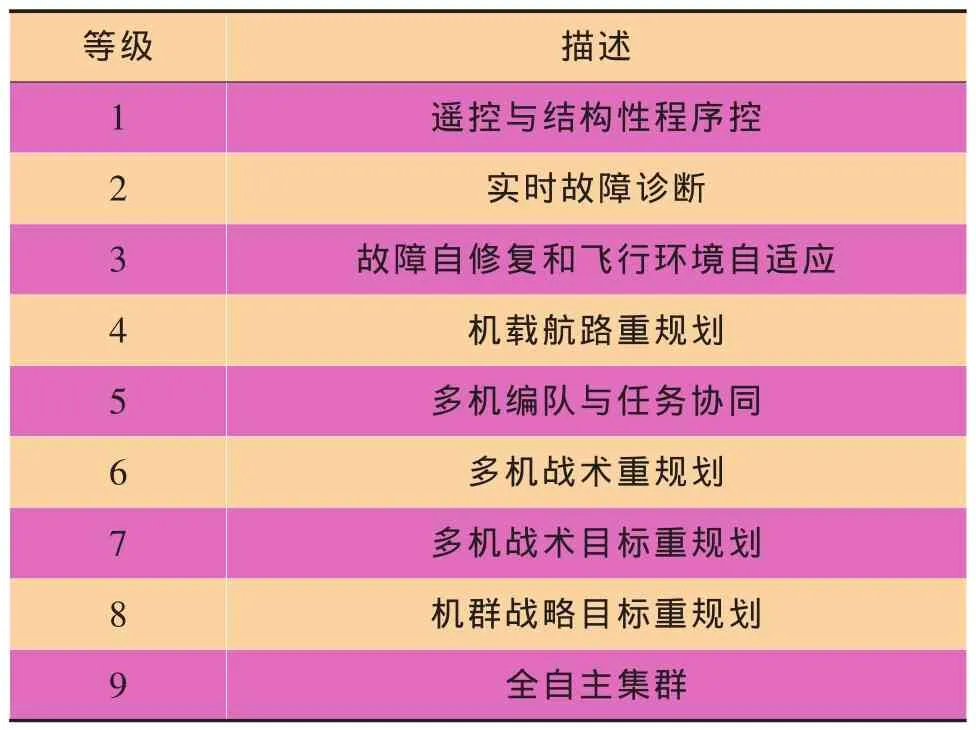
表1 自主水平等級
與美國無人機自主控制10級劃分相比,表1中給出的無人機自主控制9級劃分的等級次序與其相同,等級命名經更改后全部反應該等級的軍事應用特征,還取消了不能歸為智能活動的分布式控制等級。
2.2.2 自主控制的主要技術特征
國內外學者對自主控制的關鍵技術進行了大量深入的研究。文獻[8]認為進行自我決策、自我控制是實現自主控制的一個重要標志;文獻[9]認為自主控制需要具備通信、協調、目標識別與分配、沖突自動化解等能力;文獻[10]指出自主控制需要提供人機接口、通信和目標識別等功能;文獻[11]、[12]認為態勢感知、決策分析、通信協同和實時目標重定位是自主控制必須具備的幾項重要能力;而文獻[13]認為時空建模、智能分層控制、嵌入式計算和網絡化通信是實現自主控制的關鍵。
本文根據第五代戰斗機的作戰使命和能力需求,分析自主控制系統需要完成的主要任務有:防空截擊、防空壓制、對空作戰、對地攻擊、對海作戰、戰略縱深打擊、戰場遮斷、電子對抗和偵察/監視等。完成這些任務,第五代戰斗機的自主控制系統必須具備的主要能力有:
1)自主控制系統結構。自主控制系統是一個系統階次高、子系統相互關聯,系統評價目標多且相互矛盾的復雜大系統,是多個學科的交叉[14]。自主控制系統主要任務是把各個子系統連接成一個整體,統一管理調度各個子系統,使各子系統步調一致地完成總體任務,其設計的優劣直接關系到無人操作時的第五代戰斗機整體性能的發揮和智能水平的高低。
2)多傳感器信息融合能力。未來戰場環境日益復雜,要完成作戰任務,必須充分、準確地獲取敵我雙方信息。由于獲取的信息量大,要從眾多的信息中獲取所需信息,并對這些信息進行合理利用,必須發展多傳感器信息融合技術,使第五代戰斗機具有對多種信息獲取手段所獲得的信息進行分析和處理的能力。
3)協同與交互能力。協同與交互技術主要解決無人機與無人機、無人機與有人機之間以及任務控制站、指控系統的協同操作,實現各機種間的協同作戰。
4)自主決策與控制能力。有人機上對于不同的目標和不斷變化的戰場環境,飛行員會擇機選擇相應的操作,如攻擊武器、攻擊方式、攻擊時刻和機動規避等。對于無人機,如果這些都是由操作手來完成,那么對于打擊一些稍縱即逝的機動目標和即時發現的時敏目標,必然會貽誤最佳作戰時機。因此,無人操作時,需要具備自主決策能力,主要包括目標威脅判斷、攻擊武器、攻擊方式、攻擊時刻、權限降級、自主規避、攻擊排序、火力分配和武器投放等。
5)快速動態重規劃能力。當五代機收到新的傳感器信息、命令、情報或不可預料事件發生時,就要進行實時動態重規劃,以最優的方式完成對預先任務規劃的更新,包括航路重規劃、攻擊任務重規劃和攻擊目標重鎖定等,生成新的任務。具備快速動態重規劃技術后,五代機可以根據當前的態勢和對未來一段時間內態勢的估計,結合預測控制技術,選取合適的應飛軌跡、攻擊目標或武器種類,從而賦予五代機靈活執行任務的能力。
2.3 有人/自主控制模式兼容
目前世界上最先進的戰斗機仍然是有人駕駛的。由于人這一“高級動物”的加入,使得戰斗機在空中執行任務時,變得更加靈活,可以因時、因地、因空和因海而變,可以進行大規模的機群協同作戰,在過去的海灣戰爭、伊拉克戰爭、阿富汗以及敘利亞戰爭中發揮了極其重要的作用。然而,戰斗機在執行高機動大過載飛行任務、惡劣天氣、惡劣環境、超高空飛行和超長時間飛行等超過人的生理和身體極限的任務,飛行員將無法完成。
有人戰斗機的這些不足,可以由無人戰斗機進行有效彌補。無人機要想取代有人機執行作戰任務,在作戰時需要能像戰斗員一樣能夠結合任務、態勢、環境和信息等實時決策,做出正確地判斷并有效執行才能完成任務。這就要求無人戰斗機的自主控制系統具備“人腦”一樣的智能。無人機技術發展最好的國家是美國,美國在2005年發布了最新的美國無人機系統發展路線圖,該路線圖將無人機的發展劃分為10個級別。在這個界別劃分中,5級以下反應了單機的最高自主水平,從第5級開始描述多機的自主控制能力,而7級~10級是美軍未來的發展方向,理論和技術上還處于探索階段[15]。美國最先進的無人作戰飛機的自主控制等級在5級左右,離完全自主機群協同作戰尚有很大差距。
由于無人自主控制系統是一個多學科交叉的系統工程,目前的技術還不成熟,離達到有人機一樣的作戰水平尚有很大差距,在未來20年內恐將難以實現,至少目前還無法判斷其實現的可能性;而有人戰斗機在執行高機動大過載、長航時和高危環境等任務時,又表現出明顯的不足;未來的第五代戰斗機在作戰使命和能力需求上,需要具備這些能力。鑒于這一情況,本文提出第五代戰斗機應兼顧有人駕駛和無人自主控制的兩種平臺,在執行機群協同作戰、復雜作戰環境和高度自主決策等任務時,需要飛行員配合執行;在不適宜飛行員駕駛的環境(如長時間作戰、生化威脅環境、核輻射環境等)下,又只有五代機才能完成的任務時,就可以讓戰斗機在無人狀態下執行任務。由五代機的飛行管理系統功能是有地面的工作人員根據事先編好的程序載入機載系統的,對于瞬息萬變的戰場,事先的假定都是有限的,有很多意外情況是我們無法預測的。雖然控制系統有一定的自學能力,但是與人腦相比相差甚遠。因此,為了保證飛機的安全性和可靠性,五代機具有這兩種控制模式下的一個控制原則是,盡量讓戰斗員去完成作戰任務,只有在超出戰斗員的生理極限或心里承受能力的情況下,才可以讓飛機在無人狀態下“自主”完成任務。
3 結語
本文從未來幾十年內的作戰環境、武器裝備發展體系需求和作戰使命等方面出發,提出第五代戰斗機的能力需求。并根據現有無人機的自主控制水平、未來自主控制技術的發展速度以及有人戰斗機的發展瓶頸等情況相結合,提出未來第五代戰斗機的控制模式是有人控制與自主控制兼顧。
[1]John A.Tirpak.The Sixth Generation Fighter.AIRFORCEMagazine,2009,10:38-42.
[2]Adam J.Hobert.Issue Brief Fighter Generations.AIRFORCEMagazine,2008,9:32-32.
[3]Huang H M,Messina E,Wade R,et al.Autonomy measuresf or robot s[C]MProc.IMECE 2004.2004,11:13-19.
[4]盧廣山,李峰,張紅.武器火控系統技術綜述[J].國防科技工業,2002,3:1-5.
[5]Office of the Secretary of Defense.Unmanned aircraft systems roadmap 2005-2030 [M].Washington DC,2005.
[6]Boskovic J D,Prasanth R,Mehra R K.Multilayer Architecture for Intelligent Control of Unmanned Aerial Vehicles[C],AIAA 2002-3473:1-11.
[7]陳宗基,魏金鐘,王英勛等.無人機自主控制等級及其系統結構研究 [J].航空學報,2011,6(32),1075-1083.
[8]Antsaklis PJ,Passino K M.An introduction t o intelligent and autonomous control[M].Netherlands:Kluwer Academic Publishers,1993.
[9]Mission planning systems for tactical aircraft(Pre-f light and in flight)[R].AGA RD-AR-313,1992.
[10]Chandler P R,Pachter M.Research issues in autonomous control of tactical UAVs[C].Proc.American Control Conf,1998:394-398.
[11]Clough B T.Unmanned aerial vehicles-autonomous control challenges,a researcher's perspective[C].AIAA,2003-6504:1-15
[12]Cummings M L.Designing decision support systems f or revolutionary com man d and control domains[D].Doctoral Dissertation,University of Virginia,2004.
[13]Valavanis K P.Advances in Unmanned Aerial Vehicles,State of the Art and the Road to Autonomy[M].Springer,2007.
[14]Pachter M,Chandler P R.Challenges of autonomous control[J].IEEE Control Systems Magazine,1998,18(4):92-97.
[15]高勁松,余菲、季曉光.無人機自主控制等級的研究現狀[J].電光與控制,2009,10(16):51-54.
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:58
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
作文成功之路·小學版(2020年5期)2020-06-11 12:48:46
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(2018年6期)2018-08-16 07:23:10
新高考(英語進階)(2018年1期)2018-04-18 14:00:11
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
