基于DSP2808的永磁無刷直流電動機調(diào)速控制的研究
2013-10-15 01:20:02張向文周俊趙
制造業(yè)自動化 2013年14期
關鍵詞:信號
趙 皋,張向文,黃 友,周俊趙
(桂林電子科技大學 電子工程與自動化學院, 桂林 541004)
0 引言
三相永磁無刷直流電機轉(zhuǎn)子采用的是永磁材料制成的永久磁鋼。隨著數(shù)字信號處理器DSP出現(xiàn),使得三相永磁無刷直流電動機的換相控制比較容易[1~3]。永磁體的轉(zhuǎn)子結(jié)構(gòu)簡單、運行可靠, 定子多相繞組,逆變器和霍爾位置傳感器組成電子換向器。霍爾位置檢測器相當于普通有刷直流電動機的電刷, 逆變器的輸出受霍爾位置傳感器的控制,轉(zhuǎn)子位置決定了繞組電流的相位和繞組磁勢在空間的分布, 改變轉(zhuǎn)子的相對位置, 就可以改變繞組中電流對電勢的相位差和電樞反應磁勢對磁極的相對位置[4,5]。
本文設計使用的是三相橋的上下橋單橋PWM占空比脈寬調(diào)制調(diào)速方法,相比較傳統(tǒng)三相橋上下橋同步PWM占空比脈寬調(diào)制調(diào)速方法安全系數(shù)要高一些,調(diào)節(jié)過程的復雜度要簡化一半,減少了每路上下橋中單橋IGBT的開關次數(shù),降低了IGBT的發(fā)熱量,使得IGBT的工作效率得以提高。
1 三相永磁無刷直流電機的控制換相控制原理硬件設計
三相永磁無刷直流電機的控制硬件原理框圖如圖1所示。三相永磁無刷直流電機的控制使用的是換相控制,需要用到霍爾位置傳感器來檢測轉(zhuǎn)子所轉(zhuǎn)到的位置,霍爾位置傳感器輸出的位置信號送入DSP2808,DSP2808根據(jù)此時的位置編碼查表找到相對應的逆變橋6路上下橋開關管的導通順序。輸出PWM波驅(qū)動光耦隔離板,經(jīng)光耦隔離后將5V的PWM波信號轉(zhuǎn)變?yōu)?3.7V的IGBT門驅(qū)動信號,從而使得三相永磁無刷直流電機的內(nèi)阻與電源形成回路,電流流過定子產(chǎn)生磁場使得永磁體轉(zhuǎn)子在定子磁場中受力的作用符合安培全電流定律。
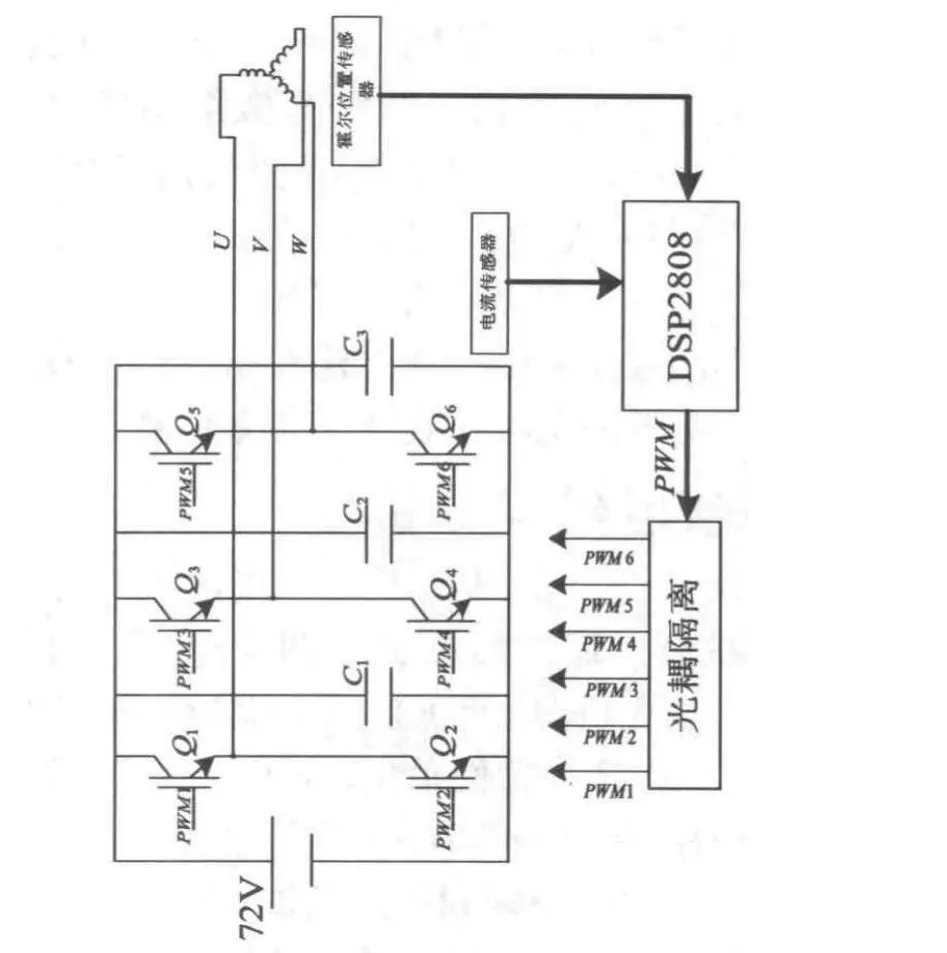
圖1 三相BLDC電機控制硬件原理框圖
在光耦隔離板上設計使用的是多路輸出的開關電源,輸入為蓄電池72V直流電壓,輸出為±15V、±12V、+5V。開關電源采用的核心是UC3844,這是一種高性能電流型PWM控制器,利用其輸出控制MOSFET的通斷,MOSFET采用的型號IRFP840,這樣UC3844就可以控制變壓器原邊的輸入電流大小,從而得到所需副邊電壓為光耦及IGBT驅(qū)動門開關供電。如圖2所示。
DSP2808輸出的PWM信號經(jīng)光耦芯片A316J隔離后輸出13.7V的IGBT門驅(qū)動信號給逆變橋,如圖3所示為光耦A316J的外圍電路原理圖 。
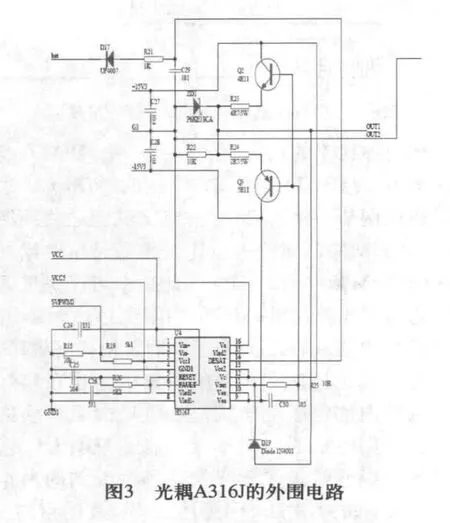
圖3 光耦A316J的外圍電路
Idc信號對應電流傳感器采樣逆變橋母線過電流信號,電流傳感器采樣信號經(jīng)放大器LMS34D反饋回芯片DSP2808,如圖4所示此電路為AD采樣電路。
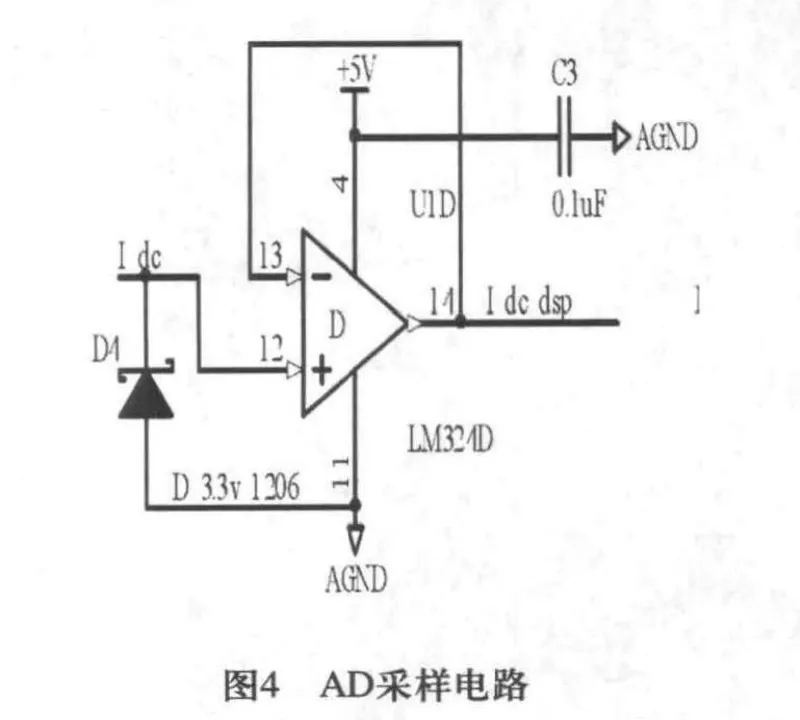
圖4 AD采樣電路
2 軟件系統(tǒng)設計
三相永磁無刷直流電機換相控制系統(tǒng)的軟件設計遵循三相六狀態(tài),根據(jù)三相六狀態(tài)表對三相永磁無刷直流電機進行換相。由于使用的霍爾位置傳感器的相位差為120 角,所以根據(jù)實際測量轉(zhuǎn)子的位置列出如表1所示的三相六狀態(tài)表。
主程序首先需要對硬件和變量進行初始化,完成各個模塊的配置,進入循環(huán)等待中斷的到來,中斷子程序到來時,就響應中斷并執(zhí)行中斷,執(zhí)行完畢清中斷返回主程序。在中斷程序中設置了霍爾位置傳感器信號采樣濾波處理環(huán)節(jié),防止電磁干擾,調(diào)節(jié)PWM的占空比及PWM輸出頻率也必須在主程序里面配置完成。PWM的輸出頻率必須和霍爾位置傳感器采集位置信號頻率相匹配,避免轉(zhuǎn)子位置判斷不準確。系統(tǒng)主程序流程圖如圖5所示,中斷程序流程圖如圖6所示。

表1 三相六狀態(tài)表
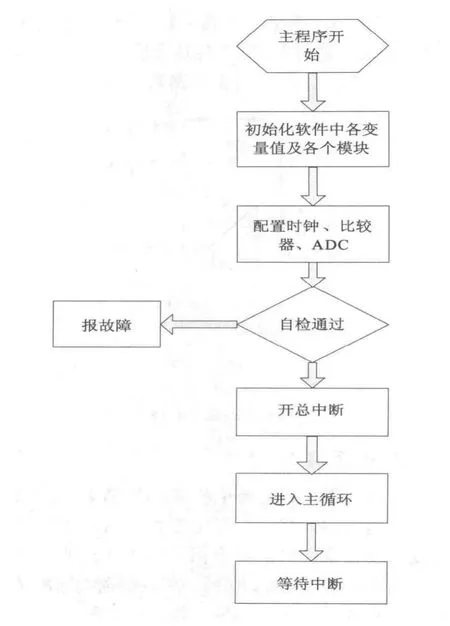
圖5 主程序流程圖
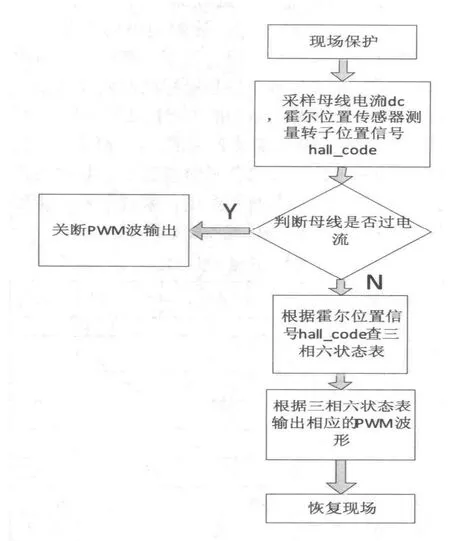
圖6 中斷程序流程圖
3 實驗
硬件實物連接圖如圖7所示,圖8為磷酸鐵鋰電池組電壓72V,其與逆變器組成逆變電路。圖7中電機為額定電流76A、額定電壓72V、額定功率5KW、額定轉(zhuǎn)速2800r/m in的永磁無刷直流電動機,逆變器IGBT型號為MMG200DR060B,參數(shù)為600V-200A,電容為三個400V-2200u f并聯(lián)組成起緩沖作用。
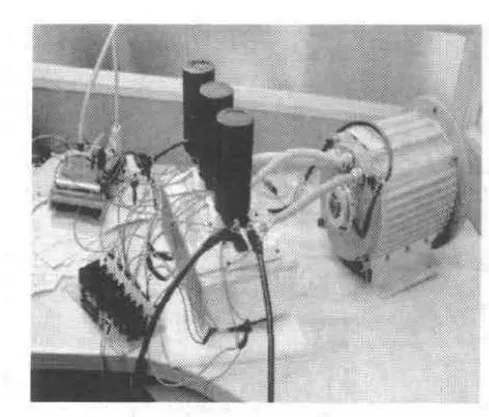
圖7 電機連接實物圖
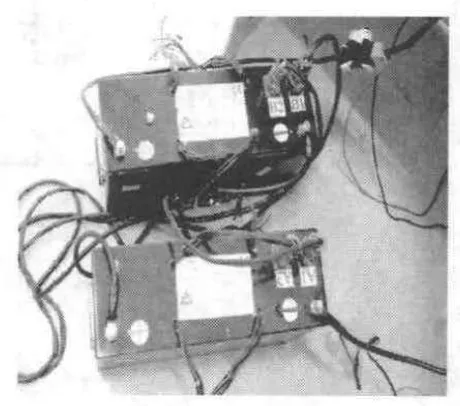
圖8 磷酸鐵鋰電池組
實物連接后DSP2808運行輸出的PWM波形為如圖9所示,達到了預期波形要求。
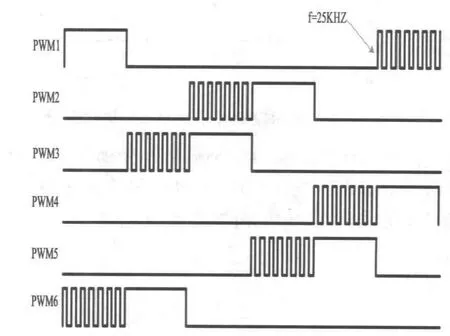
圖9 三相六狀態(tài)所對應的六路PWM波形
在一種狀態(tài)的情況下,保持一路PWM為高電平狀態(tài)另一路PWM為可調(diào)占空比的PWM波。這樣就只通過調(diào)節(jié)一路PWM的占空比就能達到調(diào)速的目的。PWM波調(diào)速的占空比大小通過按鍵增加,調(diào)速的PWM頻率為25KHZ,此頻率可以保證調(diào)節(jié)小量的占空比就使得IGBT的門限電壓達到5V開始開通狀態(tài)的要求。占空比逐步增大使得開通IGBT電壓也在逐步增加,相對的橋臂電流也在增加,流過電機內(nèi)部定子星形接法的電機內(nèi)阻產(chǎn)生磁動勢增大,而電機的磁阻不變,磁通量增大,永磁體轉(zhuǎn)子在磁通量逐步增強的磁場中受到的力矩就增大,從而轉(zhuǎn)速增加,因此達到了調(diào)速的目的。
實物實驗時電機轉(zhuǎn)速為1500r/m in時改變不同的輸入功率相對應的輸出功率曲線如圖10所示,轉(zhuǎn)矩及直流母線電壓與電流曲線如圖11所示。
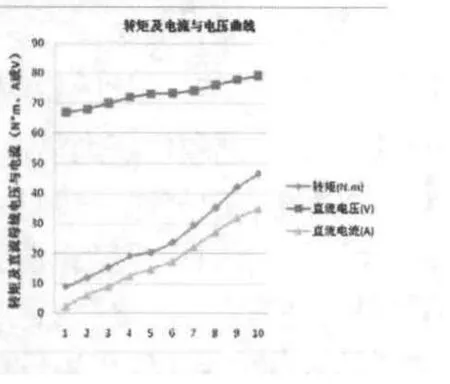
圖11 轉(zhuǎn)矩及直流母線電壓與電流曲線
由圖10和圖11可以看出隨著輸入功率及轉(zhuǎn)矩的增大,輸出功率逐漸增大到額定功率5KW。
4 結(jié)論
本文設計了一種基于DSP2808的永磁無刷直流電動機換相控制系統(tǒng),換相方式是使用霍爾位置傳感器依據(jù)三相六狀態(tài)表來換相,調(diào)速方式為上下橋單橋PWM波占空比調(diào)速,具有過電流關閉PWM波輸出功能,最終結(jié)果達到了實驗設計目的。在實際測試過程中出現(xiàn)了電磁干擾問題,電磁干擾會影響霍爾傳感器的位置信號的測量精度,霍爾傳感器的位置信號輸出采用五心屏蔽線防止電磁干擾,在程序中需要對電磁干擾進行濾波處理以保證DSP2808輸出正確的PWM波形。
[1] 嚴嵐,唐益民,賀益康.基于DSP的永磁無刷直流電機弱磁控制系統(tǒng)[J].中小型電機.2003,30(6):72-78.
[2] 尹泉,余高明,萬淑蕓.基于DSP的永磁無刷直流伺服電機全數(shù)字控制系統(tǒng)[J].電力電子技術(shù).2001,35(3):51-58.
[3] 陳璟華,汪銳,李日隆.基于TMS320C240 芯片的永磁無刷直流電機控制器[J].中小型電機.2000,27(6):34-36.
[4] 胡文靜,吳彥平.稀土永磁無刷直流電動機電樞反應的分析[J].微電機.2002,35(2):12-15.
[5] 鮑曉華,劉根,張敬華.永磁無刷直流電動機運行特性的研究[J].微電機.2002,35(2):7-9.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
