有軌導(dǎo)引小車的彎道傾覆性分析及其設(shè)計(jì)改進(jìn)
2013-10-15 01:20:12周景成楊建國(guó)楊晨星
制造業(yè)自動(dòng)化 2013年14期
周景成,楊建國(guó),楊晨星
(東華大學(xué) 機(jī)械工程學(xué)院,上海 201620)
0 引言
有軌導(dǎo)引小車又稱穿梭車,是現(xiàn)代自動(dòng)化物流系統(tǒng)中的最常用的自動(dòng)化搬運(yùn)設(shè)備。它在電控系統(tǒng)控制下,通過(guò)編碼器、激光測(cè)距傳感器等地址識(shí)別方式精確定位在各個(gè)輸入、輸出工位,接受物料后進(jìn)行往復(fù)穿梭運(yùn)輸[1]。有軌導(dǎo)引車與無(wú)軌自動(dòng)引導(dǎo)車相比,具有傳輸速度快、動(dòng)態(tài)運(yùn)輸?shù)忍攸c(diǎn),能使物料在不同工位之間的傳送及輸送線布局更加迅速、緊湊、簡(jiǎn)捷,從而提高物料的輸送效率[2],其主要應(yīng)用于等單元物料高速、高效的平面輸送自動(dòng)化物流系統(tǒng)中。
由于有軌導(dǎo)引穿梭車運(yùn)行速度越來(lái)越快,在高速運(yùn)行下,RGV的運(yùn)動(dòng)性能對(duì)RGV的安全性關(guān)系重大。所以在設(shè)計(jì)階段,應(yīng)對(duì)有軌導(dǎo)引小車進(jìn)行動(dòng)力學(xué)仿真分析,檢測(cè)校驗(yàn)設(shè)計(jì)的有軌導(dǎo)引小車的運(yùn)動(dòng)性能是否合理。在制造物理樣機(jī)前,找出和發(fā)現(xiàn)潛在的問(wèn)題,既縮短產(chǎn)品開(kāi)發(fā)周期又降低產(chǎn)品的開(kāi)發(fā)成本。
1 相關(guān)研究
RGV運(yùn)動(dòng)性能涉及小車自身結(jié)構(gòu),導(dǎo)軌平順狀況,輪軌間的相互作用力及貨架的振動(dòng)等多種因素[3],是一個(gè)包含慣性、彈性和阻尼等運(yùn)動(dòng)學(xué)特征的復(fù)雜非線性系統(tǒng),其特點(diǎn)是運(yùn)動(dòng)零件多、受力復(fù)雜。由于組成穿梭車各機(jī)械系統(tǒng)(如轉(zhuǎn)向、車架、伸縮機(jī)構(gòu))之間的相互耦合,使得穿梭車的動(dòng)態(tài)特征相當(dāng)復(fù)雜。穿梭車的運(yùn)行工況也是各式各樣,在其實(shí)際工作過(guò)程中,會(huì)受來(lái)自多方面的外在激勵(lì)和內(nèi)在控制因素的影響,不同的工況下車輛各零件的空間位置及受力情況也有所變化[4]。這方面的研究很多,S.G. Lee等人對(duì)立體倉(cāng)庫(kù)中有軌導(dǎo)引小車的出入庫(kù)效率進(jìn)行了仿真[2],而對(duì)小車出入庫(kù)運(yùn)行的安全性未做考慮;胡敏,楊建國(guó)等人對(duì)RGV在直線軌道上的側(cè)偏做了原因分析與結(jié)構(gòu)改進(jìn)[5],而對(duì)彎道運(yùn)行情況未有涉及;程鵬等人對(duì)車輛在彎道運(yùn)行過(guò)程中的控制參數(shù)進(jìn)行了優(yōu)化,以增強(qiáng)車輛在彎道行駛過(guò)程中的操控性[6],而對(duì)車輛與軌道的結(jié)構(gòu)影響未做探究;李永剛對(duì)車輛在截面為楔形的彎道上行駛時(shí)的側(cè)滑和傾覆性做了理論分析[7],但是并未涉及運(yùn)行安全的評(píng)價(jià)方法。以上及其它文章尚未對(duì)RGV在水平彎道上的傾覆性影響因素做出理論分析與研究,更未引進(jìn)明確的評(píng)價(jià)方法。
2 RGV彎道行駛傾覆性仿真方法
RGV在彎道上行駛問(wèn)題,是研究RGV運(yùn)動(dòng)性能最典型的工況之一。在對(duì)有軌導(dǎo)引穿梭車進(jìn)行彎道運(yùn)行性能分析時(shí),對(duì)研究對(duì)象的建模、分析與求解始終是一個(gè)關(guān)鍵性問(wèn)題。穿梭車本身是一個(gè)復(fù)雜的多體動(dòng)力學(xué)系統(tǒng),外界載荷的多重作用使其分析研究更為復(fù)雜。主要困難之一便是怎樣對(duì)復(fù)雜受力條件下多重自由度的分析對(duì)象有效的建立模型和求解。計(jì)算機(jī)技術(shù)的迅猛發(fā)展,使我們?cè)谔幚韽?fù)雜問(wèn)題方面有了質(zhì)的飛躍。可視化多體動(dòng)力學(xué)仿真分析軟件ADAMS可以避免建立繁瑣的動(dòng)力學(xué)微分方程,具有快速建模和仿真分析的優(yōu)勢(shì),通過(guò)此軟件可對(duì)穿梭車進(jìn)行有效的運(yùn)動(dòng)學(xué)仿真分析。
盡管ADAMS具有很強(qiáng)的整機(jī)性能測(cè)試與優(yōu)化功能,但是在進(jìn)行運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)運(yùn)算時(shí),由于其只考慮零件質(zhì)心和質(zhì)量等少數(shù)幾個(gè)參數(shù),而對(duì)零件的外形不予考慮,因此在模型中精確地描述紛繁復(fù)雜的零件外形并沒(méi)有太大的實(shí)際意義[8]。為了節(jié)省仿真建模的時(shí)間,并且保證仿真能夠順利進(jìn)行,在建立仿真模型之前要對(duì)實(shí)際三維模型進(jìn)行必要的簡(jiǎn)化。
3 RGV彎道行駛傾覆性仿真模型的建立
本文將So lid Wo rks軟件設(shè)計(jì)好的三維實(shí)體模型以X-T格式導(dǎo)入ADAMS軟件中,為了縮短仿真運(yùn)行時(shí)間,針對(duì)模型仿真的目的,對(duì)有軌導(dǎo)引穿梭車的實(shí)體模型進(jìn)行了一定的簡(jiǎn)化。1)簡(jiǎn)化原有造型中零部件的幾何形狀;2)省略原模型中不必要的零件;3)將多個(gè)無(wú)相對(duì)運(yùn)動(dòng)的零部件合并成單一的剛體來(lái)考慮。設(shè)計(jì)改進(jìn)前穿梭車整車參數(shù)如表1所示。簡(jiǎn)化后改進(jìn)前穿梭車模型如圖1所示。
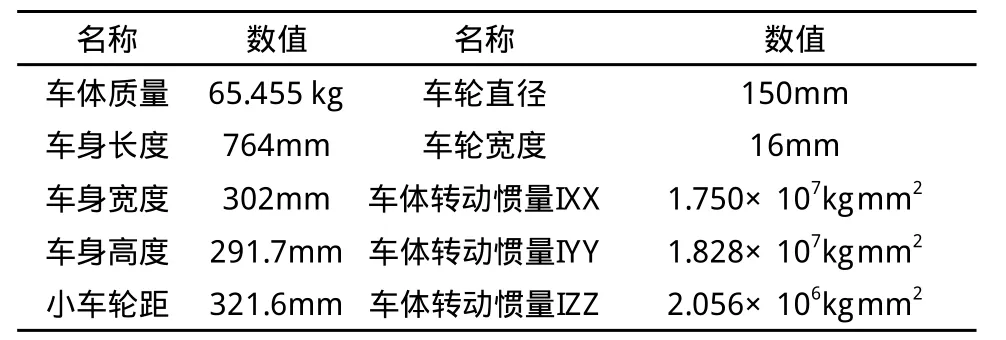
表1 設(shè)計(jì)改進(jìn)前穿梭車整車參數(shù)
圖1 改進(jìn)前有軌導(dǎo)引穿梭車虛擬樣機(jī)模型
4 穿梭車彎道行駛運(yùn)動(dòng)學(xué)仿真
4.1 仿真條件設(shè)置
為了評(píng)估穿梭車在彎道運(yùn)行方面設(shè)計(jì)的合理性,發(fā)現(xiàn)設(shè)計(jì)中隱藏的潛在問(wèn)題,對(duì)穿梭車進(jìn)行動(dòng)力學(xué)仿真。仿真條件依據(jù)穿梭車項(xiàng)目開(kāi)發(fā)設(shè)定的彎道運(yùn)行設(shè)計(jì)指標(biāo)如表2所示和通用材料參數(shù)實(shí)驗(yàn)數(shù)值進(jìn)行,如表3、表4所示。導(dǎo)向輪材料為PC,輪胎材料為TPU,導(dǎo)軌材料為Q235D優(yōu)質(zhì)碳素結(jié)構(gòu)鋼。通過(guò)觀察建立的穿梭車模型在仿真時(shí)運(yùn)行是否順利,穿梭車在高速運(yùn)行下是否會(huì)出現(xiàn)打滑、側(cè)滑、傾覆等情形。

表2 穿梭車彎道仿真運(yùn)行條件

表3 車輪與導(dǎo)軌接觸設(shè)置
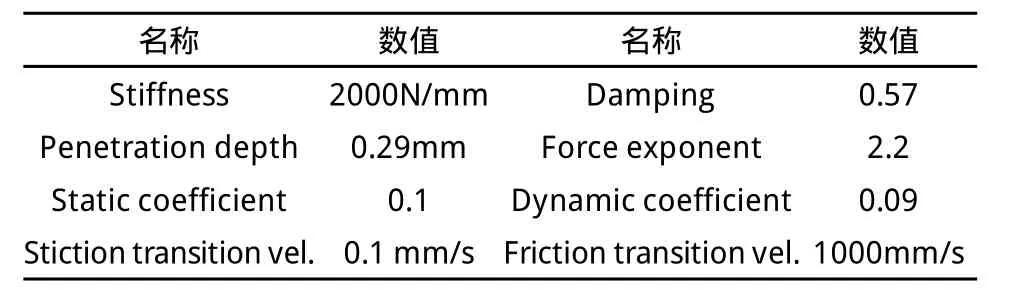
表4 導(dǎo)向輪與導(dǎo)軌內(nèi)側(cè)接觸設(shè)置
4.2 傾覆性分析及評(píng)價(jià)系數(shù)
穿梭車傾覆性趨勢(shì)強(qiáng)弱的評(píng)價(jià)方法有多種,有穩(wěn)定度/穩(wěn)定角法、穩(wěn)定性極坐標(biāo)圖法[9]、傾覆系數(shù)等。其中穩(wěn)定度/穩(wěn)定角法以及穩(wěn)定性極坐標(biāo)圖法只能反映穿梭車在靜態(tài)受力情況下的傾覆趨勢(shì)強(qiáng)弱,不能反映有加速度情況下的傾覆趨勢(shì)情況。因此,本文選用歐盟現(xiàn)行物流車輛標(biāo)準(zhǔn)EN 528-2008中對(duì)車輛傾覆趨勢(shì)強(qiáng)弱的評(píng)價(jià)方法(如式1所示)和限定標(biāo)準(zhǔn)。

彎道運(yùn)行過(guò)程中,穿梭車受力以及相關(guān)力臂尺寸如圖2所示,具體含義與數(shù)值見(jiàn)表5。
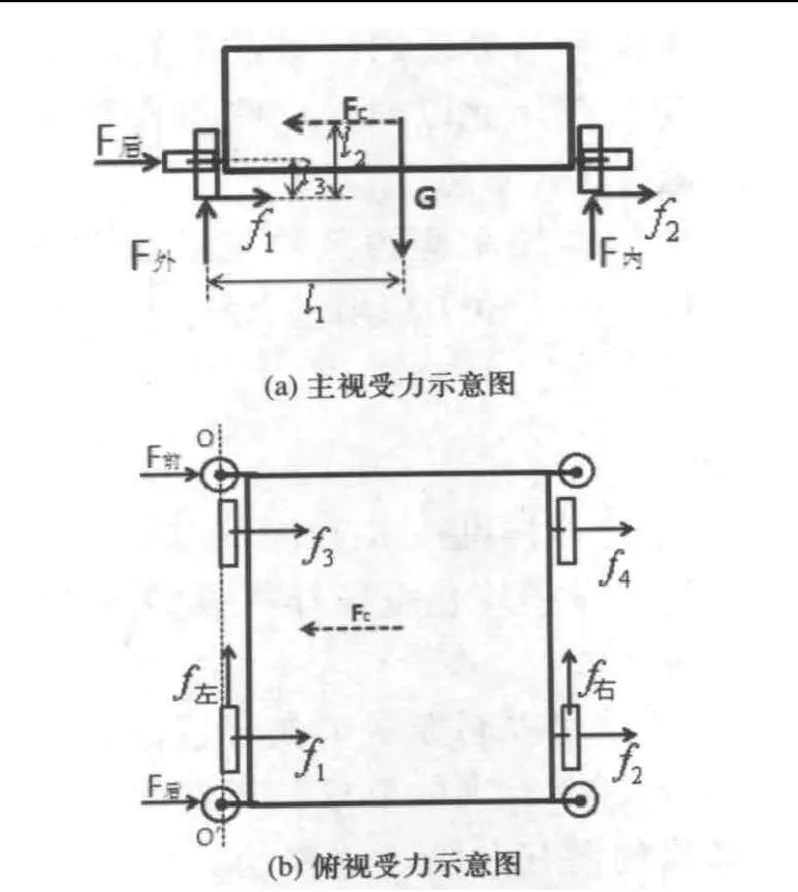
圖2 穿梭車彎道運(yùn)行主視、俯視受力示意圖
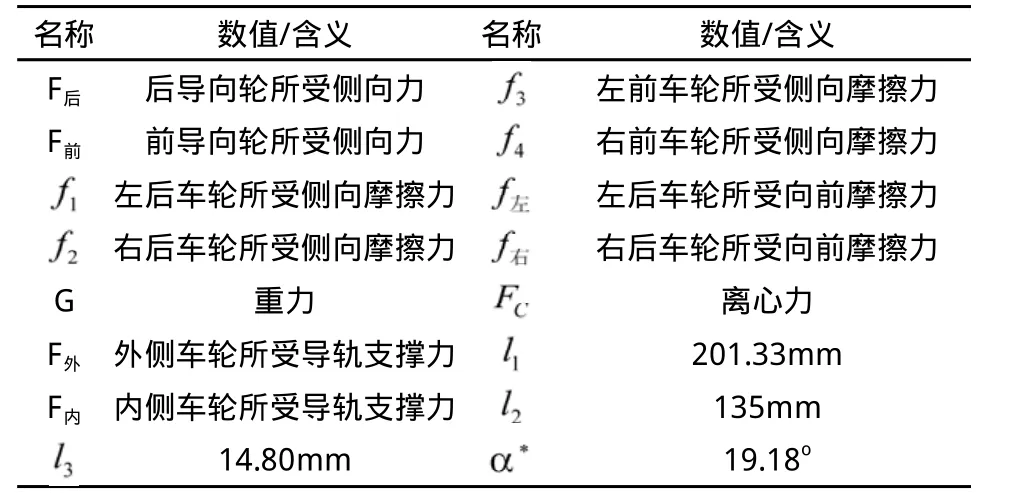
表5 受力圖參數(shù)含義和相關(guān)數(shù)值
由于:
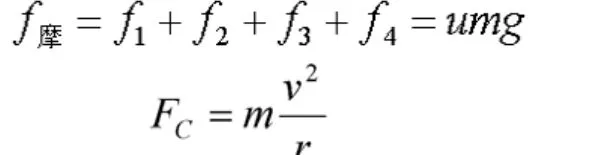
帶入計(jì)算得:
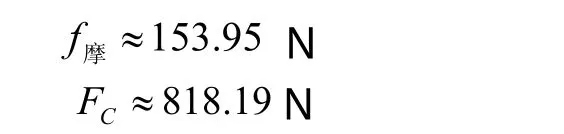
因此:

又由于:

帶入得:

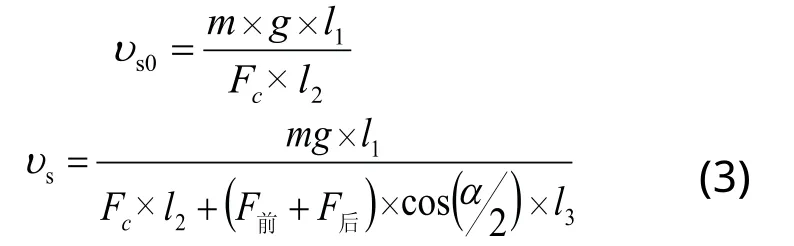
同時(shí):

綜合式(2)~式(4)可得,穿梭車將先發(fā)生側(cè)滑,隨后導(dǎo)向輪提供彎道行駛所需部分向心力。式(3)即為傾覆系數(shù)評(píng)價(jià)公式。
4.3 動(dòng)力學(xué)仿真數(shù)據(jù)
為了獲得合乎實(shí)際的仿真數(shù)據(jù),運(yùn)用step函數(shù)使模型在2s內(nèi)加速到5000mm/s,輸出衡量穿梭車傾覆趨勢(shì)大小的穩(wěn)定系數(shù)變化曲線和代表車速的穿梭車質(zhì)心速度變化曲線、側(cè)向滑移曲線,用以檢驗(yàn)穿梭車運(yùn)行是否順利。穿梭車動(dòng)力學(xué)仿真得出的車速、側(cè)滑變化曲線如圖3所示,傾覆系數(shù)變化曲線如圖4所示。
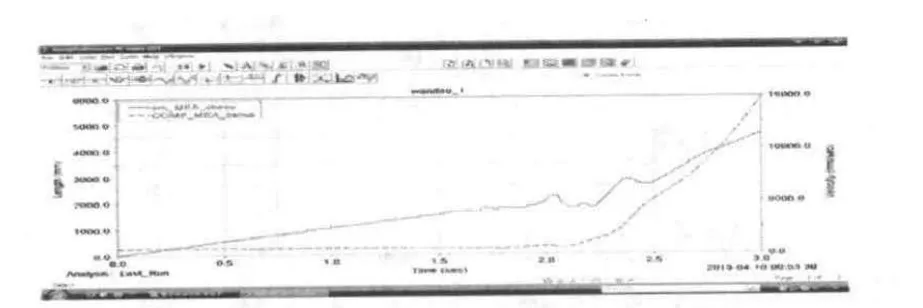
圖3 穿梭車質(zhì)心速度、側(cè)向滑移變化曲線
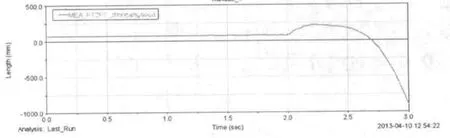
圖4 穿梭車重心高度變化曲線
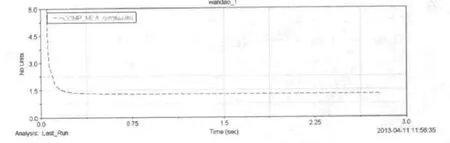
圖5 穿梭車傾覆系數(shù)變化曲線
通過(guò)圖3可以看出,穿梭車運(yùn)行速度勻速增加,2s時(shí)達(dá)到在5000mm/s左右,接近仿真設(shè)定速度,同時(shí)穿梭車在運(yùn)行之初發(fā)生了側(cè)滑,因?yàn)閷?dǎo)軌摩擦力不足以提供此時(shí)運(yùn)行所需向心力,當(dāng)滑移至導(dǎo)向輪與導(dǎo)軌內(nèi)側(cè)接觸后導(dǎo)向輪開(kāi)始起導(dǎo)向作用同時(shí)提供部分向心力,此后穿梭車一直壓迫外導(dǎo)軌內(nèi)側(cè)并摩擦前行。在2s左右階段,穿梭車速度曲線有波動(dòng),是因?yàn)榇┧筌嚢l(fā)生了向外的傾覆,側(cè)移曲線以及圖4中的重心高度變化曲線在2s處的突變均驗(yàn)證了這一點(diǎn)。
通過(guò)圖5可以看出,穿梭車穩(wěn)定運(yùn)行后的穩(wěn)定系數(shù)低于現(xiàn)行歐洲標(biāo)準(zhǔn)的規(guī)定范圍,初始值很大且迅速下降是因?yàn)榇┧筌嚦跏妓俣葟牧阊杆僭黾拥脑颉囊陨峡梢钥闯霰仨殞?duì)穿梭車車彎道行駛過(guò)程中的傾覆性影響因素進(jìn)行分析并對(duì)穿梭車原有結(jié)構(gòu)進(jìn)行改進(jìn)。
5 設(shè)計(jì)改進(jìn)
由式(3)可知,除設(shè)計(jì)指定運(yùn)行指標(biāo)外影響穿梭車在彎道上行駛傾覆系數(shù)大小的因素有重心高度、軸距以及導(dǎo)向輪中心高度。
鑒于穿梭車結(jié)構(gòu)上的布置,為改善和避免車輛傾覆,通過(guò)降低輪徑即降低重心高度的方式和增加輪距來(lái)改善穿梭車的傾覆性。

表6 改進(jìn)尺寸與數(shù)值
由于初次建模時(shí),穿梭車的軸距、輪徑等尺寸都已進(jìn)行了參數(shù)化,因此只需修改數(shù)據(jù)即可。對(duì)改進(jìn)后的模型進(jìn)行仿真,對(duì)穿梭車的速度、重心高度、側(cè)移量進(jìn)行檢測(cè)并查看改進(jìn)后的效果。改進(jìn)后的穿梭車速度和側(cè)移量、重心高度、傾覆系數(shù)變化曲線分別如圖6、圖7和圖8所示。
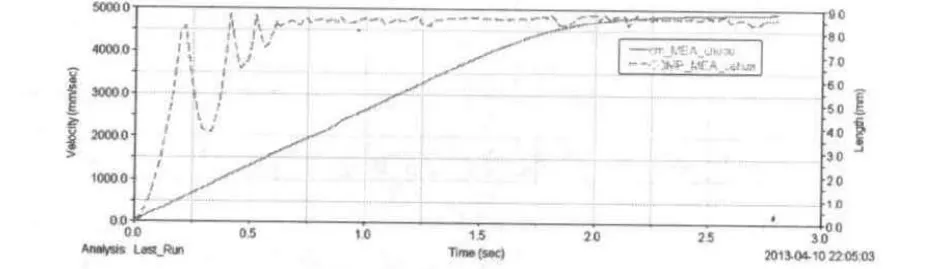
圖6 改進(jìn)后穿梭車運(yùn)行速度、側(cè)移量變化曲線
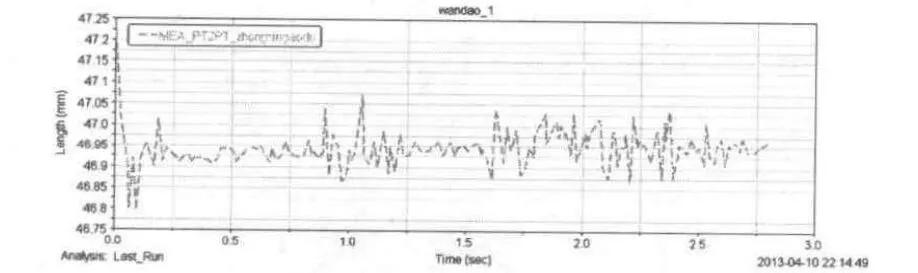
圖7 改進(jìn)后穿梭車重心高度變化曲線
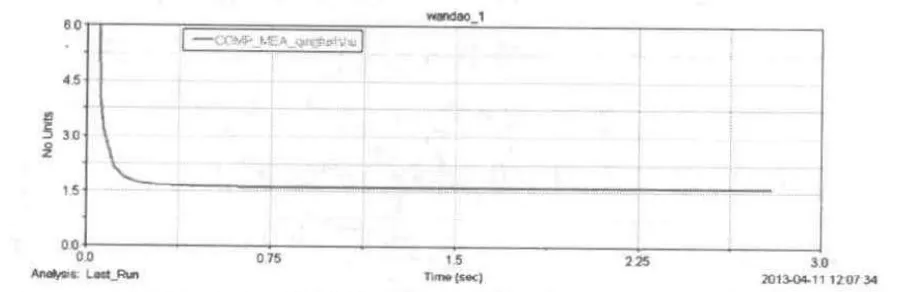
圖8 改進(jìn)后穿梭車傾覆系數(shù)變化曲線
由圖6、圖7可以看出,改進(jìn)后的穿梭車速度曲線在加速和勻速狀態(tài)下即2s前后均很順滑;重心高度曲線也相對(duì)穩(wěn)定,之所以看起來(lái)波動(dòng)厲害是因?yàn)閳D像被放大了,曲線前端的上升和振蕩是由穿梭車側(cè)滑和與導(dǎo)軌的碰撞產(chǎn)生的,但運(yùn)行穩(wěn)定后的波動(dòng)只在1mm以內(nèi);這些均表明穿梭車在彎道上的運(yùn)行比較平穩(wěn)。
改進(jìn)后的穿梭車傾覆系數(shù)變化曲線如圖8所示,仿真期間始終位于極限值1.5以上,符合歐盟的標(biāo)準(zhǔn)。
6 結(jié)論
1)基于虛擬樣機(jī)技術(shù),在ADAMS環(huán)境下,建立了有軌引導(dǎo)小車模塊化虛擬樣機(jī)模型,并對(duì)其進(jìn)行了動(dòng)力學(xué)仿真。
2)仿真結(jié)果表明穿梭車在彎道行駛時(shí)不符合歐盟EN 528-2008標(biāo)準(zhǔn)的要求,彎道行駛過(guò)程中存有產(chǎn)生傾覆的潛在危險(xiǎn)。這將給穿梭車的量產(chǎn)帶來(lái)阻礙,容易引發(fā)事故。通過(guò)對(duì)穿梭車輪徑和軸距的改進(jìn),避免了穿梭車穩(wěn)定性差,易傾覆的問(wèn)題,使穿梭車符合歐盟物流車輛標(biāo)準(zhǔn),改善了穿梭車的運(yùn)行性能。
3)所建仿真模型可有效反映穿梭車彎道行駛動(dòng)力學(xué)過(guò)程,可以方便、可視化地研究穿梭車的動(dòng)態(tài)力學(xué)性能,部分代替物理樣機(jī)試驗(yàn)。通過(guò)仿真發(fā)現(xiàn)穿梭車設(shè)計(jì)中隱藏的問(wèn)題,在降低成本的情況下縮短開(kāi)發(fā)周期,同時(shí)也可以為參數(shù)優(yōu)化等后續(xù)研究提供依據(jù)。
[1] 樓冬梅,楊曉代.穿梭車在自動(dòng)化物流系統(tǒng)中的控制及應(yīng)用[J].煙草科技,2002(10):23-25.
[2] S.G. Lee,R. de Souza, E.K. Ong. Sim u lation m odeling of a narrow aisle automated storage and retrieval system(AS/RS) serviced by rail guided vehicles[J].Com puter Integrated Manu facturing,1996(30):241-253.
[3] 劉宏友.高速列車中的關(guān)鍵動(dòng)力學(xué)問(wèn)題研究[D].西南交通大學(xué),2003:15-19.
[4] 饒劍.基于ADAMS的懸架系統(tǒng)動(dòng)力學(xué)仿真分析與優(yōu)化設(shè)計(jì)[D].武漢理工大學(xué),2005:4-6.
[5] 胡敏,楊建國(guó),等.基于ADAMS的有軌引導(dǎo)小車運(yùn)動(dòng)學(xué)仿真及設(shè)計(jì)改進(jìn)[J].機(jī)械設(shè)計(jì)與制造2012(10),81-83.
[6] 程鵬.車輛彎道制動(dòng)工況下的動(dòng)力學(xué)研究[J].科技信息2011(2),365-367.
[7] 李永剛.車輛在彎道處側(cè)滑和傾覆的原因及對(duì)策[J].公安大學(xué)學(xué)報(bào)1995(2)43-45.
[8] 朱和軍,許永根,施琴.基于Pro/E和ADAMS的并聯(lián)機(jī)構(gòu)設(shè)計(jì)與仿真[J].機(jī)械設(shè)計(jì)與制造,2011(9):208-210.
[9] 宋宇海,葛安華,潘新影.車輛穩(wěn)定性的全面評(píng)價(jià).[J].吉林林業(yè)科技1998(2),47-48.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
