高壓帶電作業機器人視覺伺服系統
2013-10-15 01:20:14王振利魯守銀趙玉良呂曦晨
制造業自動化 2013年14期
王振利,魯守銀,李 健,趙玉良,呂曦晨
(山東電力集團公司 電力科學研究院,濟南 250002)
0 引言
隨著社會數字化、信息化的不斷發展,電力供應的連續性和可靠性顯得尤為重要。高壓帶電作業作為一種在高壓電氣設備不停電情況下進行檢修、測試的作業方法,是避免檢修停電,保證正常供電的有效措施。
傳統的高壓帶電作業工作由人工完成,由于作業人員都處于高電壓、高空環境中,具有作業勞動量大、作業危險性大等缺點。隨著機器人技術的發展,機器人輔助或者代替人工,實現帶電作業已經成為可能。
現有高壓帶電作業機器人系統一般采用主從控制方式(如圖1所示)。操作人員通過主手控制機械臂的運動,實現高壓帶電作業。該控制方式仍需人工參與,無法擺脫高壓、高空的工作環境,且對操作人員的操作能力要求較高。

圖1 高壓帶電作業主從控制機器人
本文提出一種高壓帶電作業機器人視覺伺服系統,該系統通過視覺方法獲取設備位置信息,并將該位置信息反饋機器人控制系統,形成伺服控制系統。利用該系統可在無人參與的情況下,實現高壓帶電作業,提高作業自動化水平和作業效率。
1 系統概述
如圖2所示,高壓帶電作業機器人視覺伺服系統由機器人控制單元、高壓帶電作業機器人、雙目相機和視覺定位單元組成。系統通過雙目立體相機獲取作業現場圖像,視覺定位單元對獲取圖像進行分析處理,得到設備的位置信息,機器人控制單元接收該位置信息,實現高壓帶電作業機器人的閉環伺服控制。
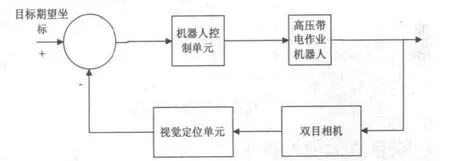
圖2 高壓帶電作業機器人視覺伺服系統框圖
在該伺服系統中,雙目相機需事先實現標定,以消除相機自身存在的畸變和左右相機極線的水平一致。
視覺定位單元將雙目相機采集的圖像信號轉換為機器人控制單元可以接收的位置信號,是系統中最重要的部分。
本系統利用雙目立體視覺相關算法并結合目標跟蹤算法實現圖像信號的處理,并獲取設備位置信號,其具體實現方式將在下一節做詳細說明。
2 視覺定位
在立體視覺領域,通過分析雙目立體相機采集的左右兩幅圖像可以方便獲取圖像的三維信息,然而該方法運算量大,如果處理整幅圖像很難滿足實時性的要求,為此本文對算法做了相應的改進,在立體視覺算法前加入了目標跟蹤算法,將立體視覺跟蹤算法限定在目標跟蹤窗內的有限區域內,降低算法運算量,提高算法的實時性。
圖3為視覺定位方法的流程框圖。其中,初始化操作作用是人工指定圖像中要操作設備的感興趣區域;卡爾曼濾波用于消除設備跟蹤過程中出現的錯誤,提高跟蹤的準確性。
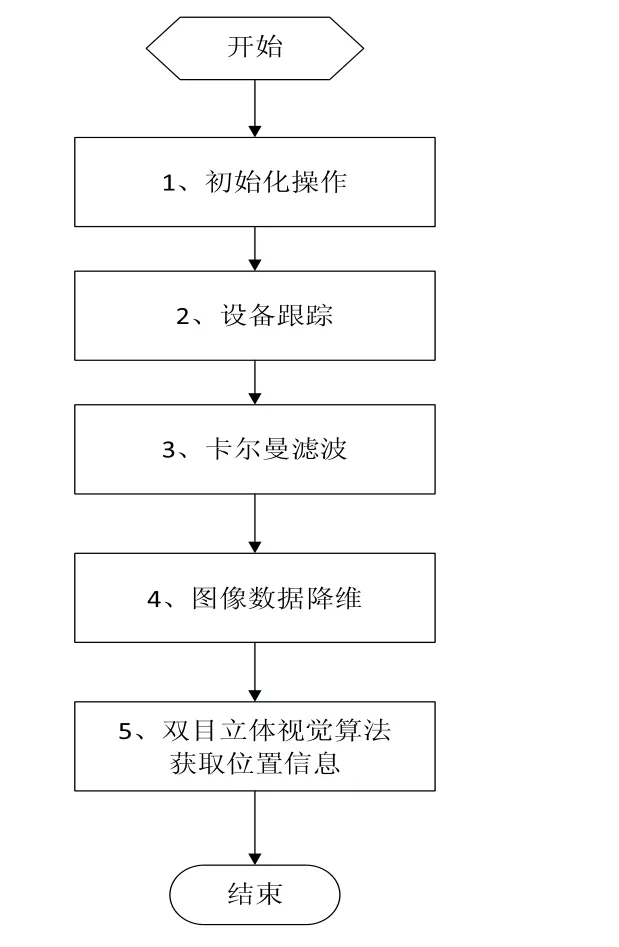
圖3 視覺定位流程圖
2.1 雙目立體視覺算法
雙目立體視覺算法是基于視差原理(如下圖所示)。其中基線距 為左右兩攝像機的投影中心連線的距離,相機焦距為 。
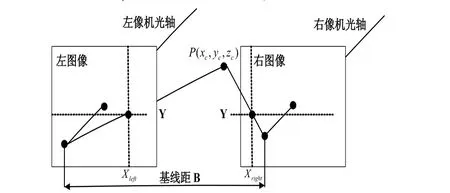
圖4 雙目立體成像原理圖

假定兩攝像機在同一個平面上,則特征點的圖像坐標 坐標相同,則由三角幾何關系得到:
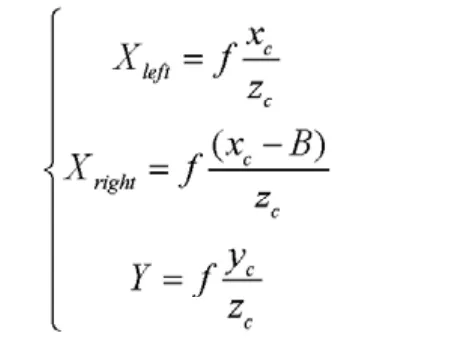
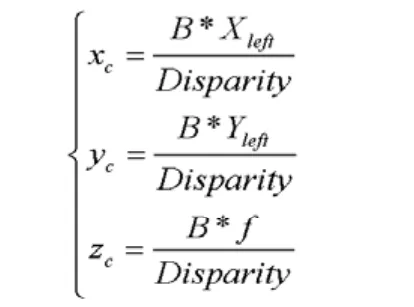
因此,左相機像面上的任意一點只要能在右相機像面上找到對應的匹配點,就可以確定出該點的三維坐標。這種方法是完全的點對點運算,像面上所有點只要存在相應的匹配點,就可以參與上述運算,從而獲取其對應的三維坐標。
遍歷左右圖像中的所有點類似點對,計算左右視圖的視差,根據上述算法實現設備三維點云信息的獲取。
正如前文所述,如果處理整幅圖像很難滿足實時性的要求,為此本文、在立體視覺算法前加入了目標跟蹤算法,將立體視覺跟蹤算法限定在目標跟蹤窗內的有限區域內,提高算法的實時性。
2.2 目標跟蹤算法
本文目標跟蹤算法采用Ca m Sh if t算法。Cam Shift算法能有效解決目標變形和遮擋的問題,對系統資源要求不高,時間復雜度低,在簡單背景下能夠取得良好的跟蹤效果。其實現步驟包括顏色概率分布計算、Mean Shift算法和Cam shift目標跟蹤。
1)顏色概率分布計算
圖像RGB顏色空間對光照亮度變化較為敏感,為了減少此變化對跟蹤效果的影響,首先將圖像從RGB空間轉換到HSV空間,然后對其中的H分量作統計直方圖,直方圖數據代表了不同H分量值在圖像中出現的概率,將圖像中每個像素的值用其H分量出現的概率替換,就得到了顏色概率分布。
2)Mean Shift算法
Mean Shift算法是一種密度函數梯度估計的非參數方法,該算法通過迭代尋優找到概率分布的極值來定位目標,其實現過程如下:
(1) 首先在圖像顏色概率分布中選取跟蹤窗;
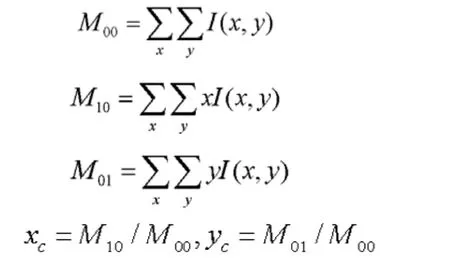
(4) 移動跟蹤窗的中心到質心,如果移動距離大于預設的固定閾值,則重復b、c和d,直到跟蹤窗的中心與質心間的移動距離小于預設的固定閾值,或者循環運算的次數達到某一最大值,停止計算。
3)Cam shift目標跟蹤
將m eanshift算法擴展到連續圖像序列,就是cam shift算法。它將視頻的所有幀做m eanshift運算,并將上一幀的結果,即搜索窗的大小和中心,作為下一幀m eanshift算法搜索窗的初始值。如此迭代下去,就可以實現對目標的跟蹤。
在背景較為復雜,或者有許多與目標顏色相似像素干擾的情況下,因為Cam Shift算法只考慮顏色直方圖,忽略了目標的空間分布特性,會導致跟蹤失敗,所以這種情況下需加入卡爾曼濾波來過濾跟蹤過程中出現的錯誤。
2.3 卡爾曼濾波
在目標跟蹤過程中,目標的位置、速度、加速度等測量值往往在任何時候都有噪聲。卡爾曼濾波利用目標的動態信息,能設法去掉噪聲的影響,得到一個關于目標位置的好的估計。
本文將目標窗口的位置和移動速度作為的觀察值,利用卡爾曼濾波算法實現對觀察值的準確估計,進而修正目標跟蹤的結果,實現目標的準確跟蹤。卡爾曼濾波的使用能有效的降低在目標跟蹤過程中出現的錯誤跟蹤,提高跟蹤的準確性,進而提高算法的有效性。
3 實驗數據和分析
為驗證本文算法的算法實時性,在視頻中連續抽取十幀圖像,分別采用整幅圖像雙目運算和本文算法,統計其運行時間,其結果如圖5所示。
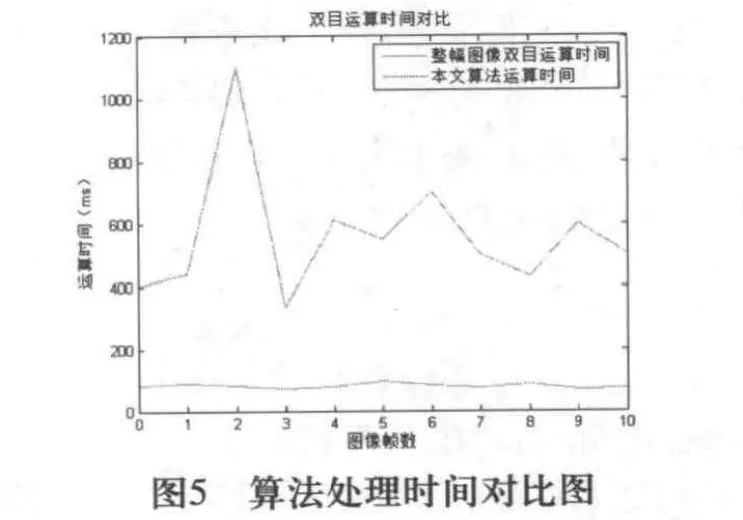
圖5 算法處理時間對比圖
從上圖可以發現,整幅圖像雙目算法運行單幀圖像運行時間較長,大都大于400m s,無法滿足實時性的要求,且由于算法運行的時間與圖像的復雜度存在很大關系,導致算法運行時間的方差較大,算法穩定性較差。
本文算法由于采用了目標跟蹤算法,算法運算可以限制在設備范圍以內,運算量大為縮減,運行時間相對較短,基本保證在100m s以內,可以滿足算法實時性的要求,且由于設備范圍內圖像復雜度相對穩定,從而保證算法運行時間的方差較小,算法穩定性得到大大提高。
為驗證本文算法的有效性,將本文算法實際應用于高壓帶電作業機器人系統,并將相機坐標系坐標轉換為機器人工具坐標系坐標,分析其水平X(水平)方向、Y(豎直)方向和Z(距離)方向隨時間變化的關系,分析算法的有效性。
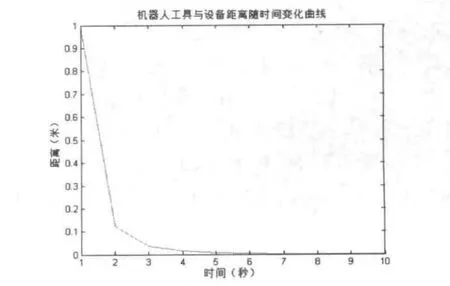
圖6 機器人工具與設備距離變化曲線
本文以Z方向為例說明算法的有效性。上圖為機器人工具與設備距離隨時間變換的變化曲線,從圖中可以看到,本文算法能保證其迅速收斂,在時間大于6秒時,該距離已收斂為0,從而保證了算法的有效性。
4 結束語
本文提出一種高壓帶電作業機器人視覺伺服系統,該系統通過視覺方法獲取設備位置信息,并將該位置信息反饋機器人控制系統,形成伺服控制系統。通過實驗表明,該系統滿足應用的實時性和有效性要求,可在無人參與的情況下,實現高壓帶電作業,提高作業自動化水平和作業效率,具有極高的應用推廣價值。
[1] 魯守銀,馬培蓀,戚暉,厲秉強.高壓帶電作業機器人的研制[J].電力系統自動化,2003,17.
[2] 陳亮,楊汝清,謝霄鵬.基于視覺的高壓帶電清掃機器人瓷瓶自動定位伺服系統[J].機器人,2004,2.
[3] 高宏偉.計算機雙目立體視覺[M].中國:電子工業出版社 ,2012.
[4] Saw ada J;Kusum oto K;Maikaw a Y. A Mobile Robot for Inspection of Pow er Transm ission Lines[J]. IEEE Trans on Pow er Delivery,1991,6(1):309-315.
[5] Nakash im a M;Yano K;Maruyam a Y. The Ho t Line Work Robot System "Phase Ⅱ” and Its Hum an-robot Interface”Mos” [J].Proc of the IEEE/RSJ Inter Con f on Intelligen t Robo ts and System s,1995,2:116-123.
[6] Santam aria A;Aracil R;Tuduri A. Teleoperated Robots for Live Pow er Lines Maintenance (ROBTET) [J]. In:Proc o f 14th International Conference and Exhibition on Electricity Distribution,1997,3(31):1-5.
[7] Yi H;Jiansheng C.The Research of the Automatic Washingbrushing Robot of 500 kV DC Insu lator String[J].In:Proc of the 6th International Conference on Transm ission and Distribution Construction and Live Line Maintenance,1994:411-424.
[8] GODZHIEV C M.Testing the covarian ce m atrix o f a renovation sequence under operating o f the Kalm an filtor[J].Autom ation and Rem ote Contro l,1996,57(7):1046-1052.
[9] Lowe D.Distinctive im age features from scale-invariant keyp o in ts[A].In ternationa l Jou rnal o f Com p u ter Vision[C].2004:91-110.
[10] Boyer M.System Intergration in Telerobotics:Case Study:Main tenance o f Electric Pow er Lines[A][J].IEEE International Con ference on Robotics and Autom ation M inneapo lis[C].M innesota,1996.
