震后救援機器人結構設計
2013-10-15 01:20:32劉建君尚偉燕葉川崎黃權榮魏建偉
制造業自動化 2013年15期
關鍵詞:結構
劉建君,尚偉燕,葉川崎,黃權榮,魏建偉
(寧波工程學院 機械學院,寧波 315016)
0 引言
全世界每年都遭受著大量自然災害和人為災害的破壞。巨大的災害會造成大面積的建筑物坍塌和人員傷亡,災害發生之后最緊急的事情就是搜救那些被困在廢墟中的幸存者。然而,復雜危險的災害現場給救援人員及幸存者帶來了巨大的安全威脅,也會阻礙救援工作快速有效地進行。使用救援機器人進行輔助搜救是解決這一難題的有效手段[1~3]。為提高救援效率,一方面要求救援機器人有能力穿越震后廢墟的復雜環境搜尋幸存者,并獲取幸存者所處環境相關信息,因而其行走機構需具備可靠的越障能力和狹窄空間通過能力;另一方面要求救援機器人可以攜帶少量救援物資送達幸存者身邊,從而贏得寶貴救援時間。因此,研究震后救援機器人行走機構及物資供給機構,可以提高救援的效率和可靠性,具有重要的現實意義。
1 機器人車體部分的設計
機器人在不平地面狀況下行走時,為確保車身不發生側翻,左右輪距需要保持足夠間距。但救援機器人在行進過程中通常會遇到狹窄地形,車身寬度往往會限制機器人正常通過。因此,如果在機器人上安裝一個變距裝置,其左右輪間距可根據需要隨時調整,可以提高機器人的復雜地面通過能力。
1.1 變距結構的設計
變距裝置的主要結構是螺套螺桿副,其結構簡圖如圖1所示。
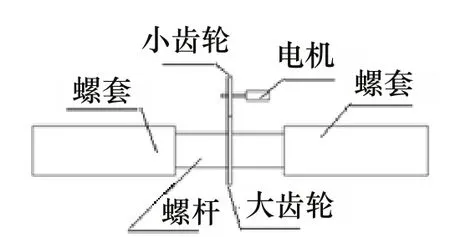
圖1 螺紋螺桿變距結構簡圖
從圖1中可以看出,該變距結構包括左右兩個對稱安裝的螺套結構,左右兩個螺套中螺紋旋向相反,中間的螺桿可在電機驅動下轉動。軸上安裝感應裝置,以確保變距的精確性。其結構如圖2所示。
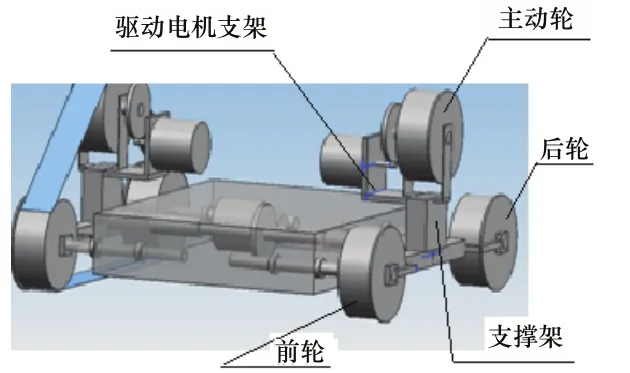
圖2 行走系統結構簡圖
變距時,左右輪同步等速撐開,使得左右輪關于車體縱向中心線時刻保持對稱,可以確保左右輪撐開時機器人重心不會發生偏移,從而實現機器人復雜環境的穩定行進。變距結構中驅動電機安裝于車體上,左右螺套分別固定安裝于左右輪支承架上。
1.2 移動系統結構設計
目前,機器人的移動系統主要有:輪式、腿式、履帶式[4]。輪式的移動系統具有機械結構簡單、移動速度快和易控制的特點,但是對于復雜環境的適應能力差;腿式移動系統雖具有很強的地面適應性和較好的機動性,但是該形式移動系統運動速度慢,控制復雜[5,6];履帶式移動系統具有良好的越障性能及較強的適應性。因此,設計中考慮采用履帶式移動系統,符合救援機器人在行駛穩定性和復雜地面適應性上的要求。考慮到復雜行駛環境和安裝空間限制,行走系統設計方案最終確定的結構如圖3所示。
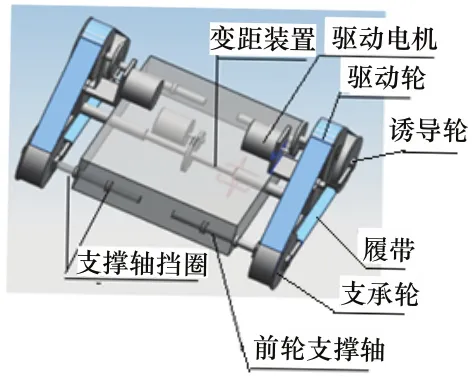
圖3 行走系統結構簡圖
由圖3可以看出,主動輪支承于前后輪之間的支承架上,驅動電機支架也固聯于支承架上,前后輪分別與前后輪支承軸通過鍵聯接。驅動輪置于行走系統上方降低了地面沖擊對驅動電機及減速齒輪的影響,有利于提高機器人行駛穩定性,同時可以提高移動系統在復雜環境下工作的安全性和穩定性。驅動輪、誘導輪和支承輪上加工有輪齒,可以防止打滑,提高電動機扭矩的傳遞效率。前后輪支承軸通過軸承支承于車身上,其中支承軸與軸承內圈形成間隙配合,中間加涂潤滑油減少摩擦,便于變距過程中前后輪支承軸相對車身左右滑動;前后輪支承軸上裝有支承軸擋圈,左右輪距最小時,靠兩側外支承軸擋圈限制車身的橫向串動,左右輪距最大時,靠兩側內支承軸擋圈限制車身的橫向串動。
2 救援物質運輸裝置的設計
震后救援機器人在不同情況下,需要的救援物資各不相同。因此救援機器人的物資輸送系統需要有較高的環境適應能力,從而完成不同的作業要求。本設計中救援機器人采用的是混合式物質輸送裝置。該裝置包括救援物資儲運裝置和機械手兩部分結構,其結構布置如圖4所示。

圖4 混合式救援物資輸送裝置結構布置
其中,救援物資儲運裝置主要起到貯存不同種類救援物資的作用,其結構如圖5所示。

圖5 救援物資儲運裝置
該救援裝置伸縮臂部分由兩個直流電機同步驅動。伸縮臂由兩節滑道組成。下滑道上安裝直流驅動電機及齒輪,上滑道安裝齒條,在電機驅動下齒條可以實現前后滑移,可將救援物資直接運輸到被救援對象面前,或者在機械手的協助下抓取物資送達被救援對象。機械臂結構是抓取裝置設計中另外一個重要環節。機械臂結構中包括五個自由度,結構簡圖如圖6所示。

圖6 五自由度機械臂結構示意圖
舵機與小車車身固定聯接,在舵機的驅動下短臂可以帶動機械臂完成360的旋轉運動。在鉸接點a、b、c、d處分別安裝四個舵機,實現相鄰兩機械臂之間的相對轉動。通過控制該結構形式的機械臂可以使機械手較為準確地救援,以完成救援任務,救援機械手結構如圖7所示。

圖7 機械手結構
3 結束語
本文對震后救援機器人結構進行了設計,總結如下:
1)履帶輪結構的獨特設計可以降低復雜環境對驅動電機的影響,其移動系統具有良好的越障性能,可以確保救援任務的順利完成。
2)螺套螺桿變距結構設計使車體可以通過狹窄地形,增強了救援機器人地面通過性能。
3)救援物資儲運裝置設計成儲存和抓取兩部分,一次可以運輸足夠多的物資并在機械手的準確動作下確保救援物資順利到達被救援對象。
[1] 閆清東,魏丕勇,馬越.小型無人地面武器機動平臺發展現狀和趨勢[J]. 機器人,2006,26(4): 373-379.
[2] 王海彬,黃永生,姚丹霖.國外地面軍用機器人系統綜述[J]. 汽車應用,2005(11):18-20.
[3] 李穗平.軍用機器人的發展及其應用[J].電子工程師,2007,33(5):65-66.
[4] Voth D. A new generation of m ilitary robot [J].IEEE Intelligent Systems,2004,19(4):2-5.
[5] 段星光,黃強,李科杰.小型輪履腿復合式機器人設計及運動特性分析[J]. 機械工程學報,2005,41(8):109-114.
[6] 陳淑艷,陳文家.履帶式移動機器人研究綜述[J].機電工程,2007,24(12):109-1.
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
