下肢外骨骼機器人步態檢測系統的設計
2013-10-15 01:20:32侍才洪張西正
制造業自動化 2013年15期
關鍵詞:系統
柴 虎,侍才洪,陳 煒,張西正
(1. 南方醫科大學 生物醫學工程學院,廣州 510515;2. 軍事醫學科學院 衛生裝備研究所,天津 300161;3. 天津理工大學 機械工程學院,天津 300184;4. 軍事交通學院 軍事物流系,天津 300161)
0 引言
外骨骼機器人是一種結合了人的智力和機器人動力的人機一體化可穿戴智能裝置,能夠輔助或增強人體的生理機能,如防御、行走、負重等,提高使用者的作業能力。外骨骼機器人是一門新興的機器人技術,已經成為國際上研究熱點之一。外骨骼機器人技術可以應用于軍事、醫療、旅游、救災等眾多領域,有著很好的應用前景,因此許多國家開展外骨骼機器人技術的研究工作,并成功研制出外骨骼機器人。例如美國伯克利大學的BLEXX系列下肢外骨骼機器人、洛克希德公司的HULC外骨骼、美國雷神公司的XOS系列外骨骼、日本筑波大學研制的HAL系列商業外骨骼等[1,2]。
外骨骼機器人系統中,人是控制中心,外骨骼控制器利用置于人體和外骨骼機器人上的壓力傳感器、傾角傳感器、力矩傳感器、肌電傳感器、加速度傳感器、編碼器等檢測元件來獲取人體及外骨骼機器人的運動信息,計算出各個關節運動所需力矩大小,進而控制相應部位的驅動模塊工作,同時控制器對人體和外骨骼的運動狀況進行比較分析,形成反饋量,從而確保外骨骼能夠快速精確地響應人體動作[3]。其中人體的運動信息是外骨骼系統的運動的基礎信號,因此,在外骨骼系統中對人體運動信號進行采集的系統十分重要。
這里針對下肢外骨骼機器人系統中的人體,以單片機C8051F040為處理核心,利用壓力傳感器和傾角傳感器,設計了一款下肢外骨骼系統中人體行走運動信息的檢測系統,用于檢測人體行走中足底壓力和下肢各個關節運動角度變化,識別當前人體行走步態,為下肢外骨骼機器人的行走控制提供實驗平臺和理論基礎。
1 人體行走步態周期及劃分
人體在正常行走時,一個步態周期可定義為從一側腳跟著地起到同側腳跟再次著地結束,其中每條腿可分為支撐相和擺動相。支撐相指一條腿的腳跟著地到該側腿的腳尖離地的這段時間,即足部與地面接觸的時間,約占整個步態周期的60%;擺動相指一條腿的腳尖離地到該側腿腳跟著地這段時間,即足部離開地面的時間,約占整個步態周期的40%。人體行走步態周期的劃分對下肢外骨骼機器人行走控制系統的設計有著重要的意義,這里將人體正常行走步態周期劃分為四個部分:1)右單支撐;2)右雙支撐;3)左單支撐;4)左雙支撐,其中雙腿支撐狀態時間很短,約占別為左腳第一趾骨部位、第五趾骨部位和左腳跟部位處的壓力傳感器壓力值變化變量;right_1、right _2和right _3分別為右腳第一趾骨部位、第五趾骨部位和右腳跟部位處的壓力傳感器壓力值變化變量。在表中1~6列中,變量輸出‘0’表示壓力值減小;‘1’表示壓力值增大;‘Nu ll’表示該部位壓力值無明顯變化。第7列中,‘leg_angle’代表左髖關節與右髖關節運動狀態,‘1’表示左大腿在右大腿前方或處于兩腿平行;‘0’表示左大腿在右大腿后方。Gait變量為當前程序檢測步態的返回編碼值;第9列為各個編碼代表的行走步態。
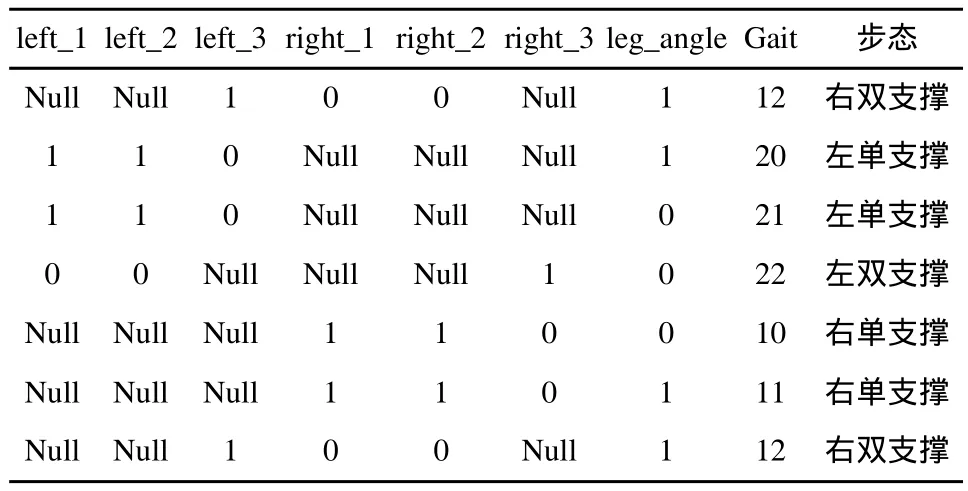
表2 步態識別程序運行結果
4 結束語
文中針對下肢外骨骼機器人系統中的人,設計了一種人體運動信號實時檢測系統。該系統以微處理器C8051F040為中心,通過分析處理人體行走中腳底壓力和關節角度信號變化,確定當前人體行走狀態。通過試驗證明該系統可以實時檢測到人體行走中體行走中腳底壓力和關節角度信息,并能識別人體當前行走步態,為下肢外骨骼機器人行走控制系統分析設計提供參考,進而為今后下肢外骨骼機器人的研究打下基礎。
[1] 張佳帆,陳鷹,楊燦軍.柔性外骨骼人機智能系統[M].北京:科學出版社,2011:11-20.
[2] 李會營,王惠源,張鵬軍,趙鑫,李傳才.外骨骼機器人發展趨勢研究[J].機械工程師,2011,(8):9-10.
[3] 楊智勇,張靜,歸麗華,張遠山,楊秀霞.外骨骼機器人控制方法綜述[J].海軍航空工程學院學報,2009,24(5):520-526.
[4] I.P.I.Pappas,M.R.Popovic,T.Keller,et al.A reliable gait phase detection system[J].IEEE Transactions on Neural System s and Rehabilitation Engineering,2001,9(2):113-125.
[5] 曹恒,孟憲偉,凌正陽,秦穎頎,賀成坤.兩足外骨骼機器人足底壓力測量系統[J].傳感技術學報,2010,23(3):326-330.
[6] 曹恒,賀成坤,孟憲偉,凌正陽.下肢外骨骼服傳感靴的結構優化分析[J].工程設計學報,2010,17(1):35-40.
[7] 張培仁,孫力.基于C語言C8051F系列微控制器原理與應用[M].北京:清華大學出版社,2009:7-61.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
