磁懸浮靜力光輪精碾壓路機
2013-10-15 01:20:40錢永明馬蘇揚
制造業自動化 2013年15期
吳 強,錢永明,馬蘇揚,廖 萍
(南通大學 機械工程學院,南通 226019)
0 引言
靜力光輪壓路機主要利用碾輪的重力作用使得被壓層產生永久變形而密實,能夠使得壓實的表面平整光滑,適用于各種路面、墊層、飛機場道面和廣場等施工工程,在現代路面的施工過程中具有廣泛的應用[1,2]。早在1858年,西方就出現了利用馬拉滾筒對碎石路面進行壓實的工作,這便是最早的靜力光輪壓路機雛形,隨后法國在1860年發明了蒸汽壓路機,使得當時路面的施工技術和質量得到了較大的提高[3],20世紀初,第一臺由內燃機驅動的靜力光輪壓路機誕生[4],至20世紀70年代,隨著靜液傳動技術和計算機技術的發展,靜力光輪壓路機在結構和功能上得到了較大的突破,如將靜液傳動和液壓系統流量技術相結合,在簡化了靜力光輪壓路機傳動系統的同時,大大提高了其運行精度[5]。近40年來,國際上對靜力光輪壓路機的加工、制造技術日趨成熟,并產生了多家著名的制造商,如美國的英格索蘭和卡特彼勒、德國的寶馬格和維特根、日本的酒井重工等[6]。國內對靜力光輪碾壓機的研究起步較晚,以1952年上海廈門路機械廠制造的第一臺以內燃機為動力的2Y6/8自行式壓路機為標記,標志著我國開始擁有了自己的壓實機械制造業[7];1953年,天津第五機械廠試制出了我國第一臺以蒸汽機為動力的10噸自行式三輪壓路機[8];60年代,徐工、上工、三明重型機器廠先后加入了壓路機的生產行列,并先后研制出了6/8噸、8/10噸、10/12噸、12/15噸的精碾壓路機;隨后,國內生產靜力光輪碾壓機的企業日漸增多,主要包括徐工、一拖、三明、柳工、三一等企業,且生產技術日益完善,與國外的差距正逐步縮小[9]。
隨著科學技術和社會經濟的不斷發展,人們對路面的平整度要求越來越高,但由于傳統的靜力光輪壓路機不具備對路面平整度在線檢測和自適應調整等功能,使得路面的平整度只能采用竣工后檢測和返修的方式得以保證,不僅影響了整體路面的整體美觀性,還延長了路面的施工周期,更難以獲得具有較高平整度水平的路面,因此,有必要開發一種新型的能夠實現路面平整度“零返修”的高精度靜力光輪精碾壓路機。磁懸浮支承技術具有較強的主動控制和信息處理能力,并能精確可靠的實現在線檢測和自動補償等功能[10],將其與傳統的靜力光輪壓路機相結合制成磁懸浮靜力光輪精碾壓路機,在對粗碾后路面進行精碾,可在提高施工路面平整度的同時,大大縮短施工周期,具有廣闊的應用前景,對促進我國路面機械的發展具有重要意義。
1 結構及工作原理
所提出的磁懸浮靜力光輪精碾壓路機的結構示意圖如圖1所示[11],根據其運動和實現磁懸浮的要求,前輪2為一整體式實心輪,后輪由兩個實心輪23、24和若干個磁懸浮碾輪組成,且兩實心輪直徑略大于磁懸浮碾輪直徑,每個磁懸浮碾輪外周套裝一個后輪動支架,每個后輪動支架6通過油缸14、25固定在后輪靜支架13上,前輪2與后實心輪23、24、后輪靜支架13通過聯接架5以及前、后輪軸3、19相連構成整車支撐結構。
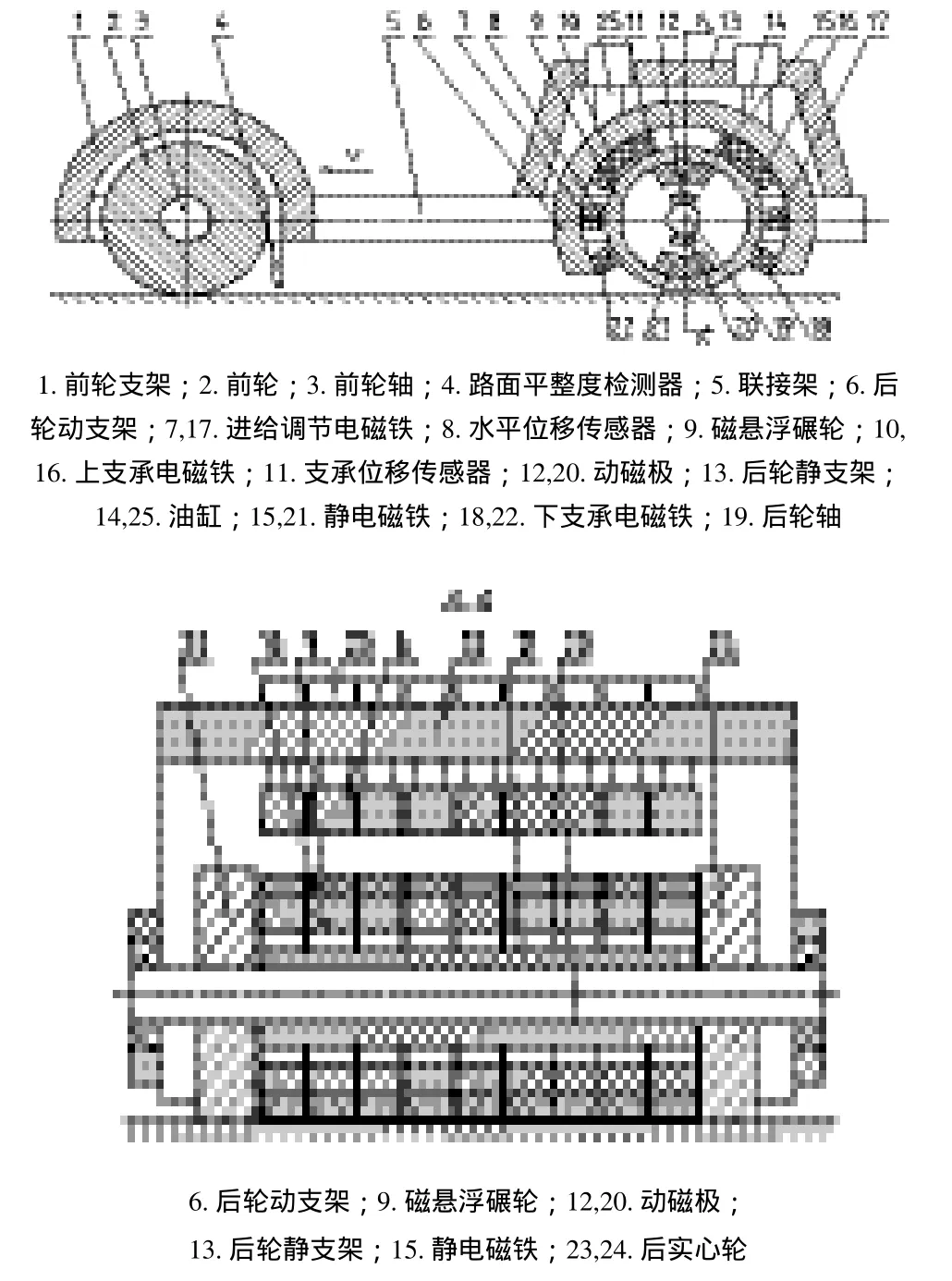
圖1 磁懸浮靜力光輪精碾壓路機的剖面結構圖
工作時,首先通過油缸14、25的調節作用使得后輪動支架6的水平中心線與后輪軸19的水平中心線重合,然后對上、下支承電磁鐵10、16、18、22和進給調節電磁鐵7、17通電,待水平、支承位移傳感器8、11檢測出磁懸浮碾輪9在進給和重力方向上均實現穩定懸浮后,靜電磁鐵15、21通電,由于上支承電磁鐵10、16和下支承電磁鐵18、22是沿后輪軸垂直方向中心線對稱的安裝在磁懸浮碾輪兩側的后輪支架中,且上支承電磁鐵10、16產生的電磁力F1、F2大小一致(如圖2所示),兩者在水平方向上的電磁力分力F1x和F2x相互抵消,同理,下支承電磁鐵18、22所產生的電磁力F3和F4沿水平方向上的分力F3x和F4x也相互抵消,因此,為保證磁懸浮碾輪在水平方向上的穩定懸浮,在后輪支架中與后輪軸水平中心線相交處安裝進給調節電磁鐵7、17。在上述工作完成后,開啟驅動電機,使得后輪軸19、后實心輪23、24和位于后輪軸上的動磁極12、20一起做旋轉運動,使得靜電磁鐵15和21分別與動磁極12和20之間磁阻的增大,根據“磁阻最小原理”,靜電磁鐵帶動磁懸浮碾輪隨后輪軸沿相同方向做同速旋轉運動,同時,后輪軸19又通過聯接架5和前輪支架1帶動前實心輪2做旋轉運動,以實現對路面的粗碾,路面平整度檢測器4及時記錄下粗碾后路面的平整度信息,并傳送至控制器,控制器經分析后,根據磁懸浮碾輪的進給速度,通過油缸14、25的作用使得后輪支架6沿垂直方向0~3mm范圍內進行調節,并同時改變上、下支承電磁鐵的電磁力大小,最終獲得所需磁懸浮碾輪的碾壓力。
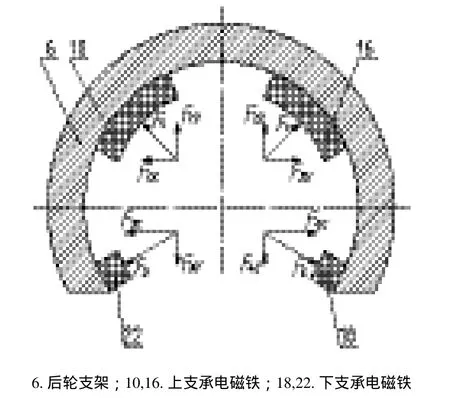
圖2 支承電磁鐵產生電磁力的示意圖
例如,當路面平整度檢測器4檢測出粗碾后某處路面的實際高度高于路面基準高度ΔX(ΔX≤3mm)時,經與其對應的控制器分析后,通過安裝在后輪靜支架上油缸的作用使得后輪動支架的水平中心線沿垂直向下的方向移動ΔX,此時,磁懸浮碾輪為了能夠繼續穩定懸浮,其通過同時減小和增大上、下支承電磁鐵的電磁力大小使得磁懸浮碾輪的水平中心線也沿垂直向下方向移動ΔX,隨后再通過調節上、下支承電磁鐵的電磁力大小獲得所需的碾壓力,從而將實際路面高度壓至基準高度。由于后輪軸以及位于其上的動磁極的相對位置不可改變,為了保證磁懸浮碾輪在垂直方向上的位置能夠根據實際路面高度自由的調節,應使得動磁極與靜電磁鐵之間穩定懸浮時的懸浮氣隙值大于磁懸浮碾輪在垂直方向上可調節位移的最大值。當磁懸浮碾輪在垂直方向上的位置發生變化時,某一動磁極與其對應靜電磁鐵之間氣隙將增大,另一動磁極與其對應靜電磁鐵之間氣隙將減小,此時應及時調整兩動磁極與其對應靜電磁鐵之間的磁場強度的大小,以保證兩對動磁極與靜電磁鐵之間懸浮氣隙在不一致的情況下仍能保證磁懸浮碾輪的正常驅動,在上述過程中,支承位移傳感器11及其控制器不工作。當路面平整度檢測器4檢測出粗碾后路面的平整度符合要求時,其控制器和油缸不工作,并保證后輪動支架的水平中心線與后輪軸的水平中心線重合,此時,支承位移傳感器11及其控制器工作,以檢測磁懸浮碾輪是否在垂直方向上偏離平衡位置,若發現磁懸浮碾輪沿垂直向下(向上)方向偏離平衡位置時,則通過其控制器的作用同時增大(減小)和減小(增大)上、下支承電磁鐵電磁力,使得磁懸浮碾輪在垂直方向上迅速回至平衡位置。因此,在磁懸浮碾輪工作過程中,路面平整度檢測器4一直處于工作狀態,但與其對應的控制器和支承位移傳感器11及與其對應的控制器并非一直處于工作狀態。此外,用于檢測磁懸浮碾輪是否在水平方向上處于穩定懸浮狀態的水平位移傳感器8及其控制器也始終處于工作狀態,以保證磁懸浮碾輪在水平方向上處于穩定懸浮狀態。
2 關鍵技術
磁懸浮靜力光輪靜碾壓路機具有對路面平整度在線檢測與自動補償的功能,解決了傳統的在路面竣工后采用諸如3m直尺最大間隙值法、連續式平整度儀標準差法、激光平整度測定儀、車載式顛簸累積儀[12]等測試方法和儀器對路面平整度進行檢測和返修以提高路面平整度水平所存在的測試效率低、人為因素影響大以及易對路面整體美觀性造成破壞等問題,對提高路面施工效率和施工質量具有重要意義。但要實現磁懸浮靜力光輪靜碾壓路機的上述功能,在對其進行設計時應解決好以下五個關鍵技術問題:
1)支承系統控制器之間切換時間的精確性和良好的銜接性
由磁懸浮靜力光輪精碾壓路機的工作原理可知,其支承系統是由接受支承位移傳感器信號的控制器和接受路面平整度檢測器信號的控制器相互交替控制的,且兩者所發出的控制信號將使得磁懸浮碾輪產生不同的碾壓力,磁懸浮碾輪在工作時是按照一定速度進行進給運動的,若不能精確的把握兩者的切換時間,則不僅不能提高路面的平整度,甚至有可能對原本平整度合格的路面造成破壞。另外,若兩控制器之間的銜接性能較差,則會造成兩控制系統切換時磁懸浮碾輪的支承系統處于非控制狀態,一方面對路面平整度造成影響,另一方面有可能造成磁懸浮碾輪工作性能的不穩定,導致磁懸浮靜力光輪精碾壓路機無法繼續正常工作。解決這一問題需要對磁懸浮靜力光輪精碾壓路機中支承系統中的兩個控制器進行綜合優化研究,實現兩控制器之間的平穩、精確、有效的切換,獲得具有高精度和高穩定性的路面平整度。
2)控制信號的高抗干擾性
磁懸浮靜力光輪精碾壓路機是一個機電磁綜合系統,包括若干個相鄰的磁懸浮碾輪,在工作時,主要依靠控制器發出的控制信號實現其運動,但磁懸浮系統所產生的電場、磁場極有可能會引起各控制信號之間的交叉影響,對控制信號造成了干擾,造成磁懸浮碾輪運動精度和碾壓力精度的降低,最終影響了路面的整體平整度,因此,可通過建立數學模型和試驗分析的方法得出對控制信號造成干擾的影響因素,將結構優化和控制器設計相結合,采用隔離、屏蔽、接地保護等技術手段,使得外界因素對控制信號的干擾以及各控制信號之間的相互干擾降至最低。
3)磁懸浮碾輪可靠的懸浮剛度
磁懸浮碾輪是磁懸浮靜力光輪精碾壓路機中極為重要的部件,其懸浮剛度對所施工路面的平整度精度起到關鍵作用。這是由于磁懸浮系統是一精密系統,其所產生電磁力的大小與懸浮氣隙二次方的倒數成正比,因此,懸浮氣隙不均勻性和微量的偏差都將對電磁力產生較大的影響,從而影響控制系統的精度,對磁懸浮碾輪的懸浮剛度造成影響,使得施工路面的平整度精度無法得到保障。因此,一方面可通過仿真和實驗分析的方法確定出磁懸浮碾輪、動磁極以及后輪軸等零件在加工過程中的幾何精度(直線度、圓度、圓柱度、平行度等)以及系統工作時的模態等所引起的懸浮氣隙不均勻對磁懸浮靜力光輪靜碾壓路機工作性能的影響程度,再以此為依據,對磁懸浮碾輪等結構進行優化,提高懸浮氣隙的均勻程度,增強磁懸浮碾輪的懸浮剛度;另一方面,對各種外界擾動力進行分析,并通過在磁懸浮碾輪中的相關位置設置加強筋和抗震器等手段,進一步提升磁懸浮碾輪的懸浮剛度。
4)高效的散熱系統
當磁懸浮靜力光輪靜碾壓路機工作時,安裝在每個磁懸浮碾輪和后輪支架上的電磁鐵將同時通電,并同時發熱產生熱量,由于各個磁懸浮碾輪和后輪支架幾乎形成了一封閉空間,且各電磁鐵之間安裝距離較小,若不及時將該熱量排出,則可能引起線圈絕緣材料性能的降低,引起系統安全可靠性的下降。因此,可根據磁懸浮碾輪及后輪支架的結構特征和工作時的運動規律,結合其溫度場分布規律,對現有的自然對流、強制風冷、液體冷卻、熱電制冷等散熱技術進行綜合分析,制出能夠可靠有效降低各磁懸浮碾輪發熱量的高效散熱系統,提高磁懸浮靜力光輪精碾壓路機的工作周期。
5)可靠的除塵技術
在對路面的施工過程中,磁懸浮碾輪和后輪支架上的電磁鐵上不可避免的有灰塵的沉積,若不及時將其清除,則有可能會在懸浮氣隙處堆積,造成磁路中磁阻的增大,引起控制系統精度的降低,使得施工路面的平整度難以得到保證,因此,要在分析現有的干式機械除塵、過濾除塵、電除塵、濕式除塵等除塵方法的優缺點的前提下,針對磁懸浮碾輪的結構特征和磁懸浮系統的工作要求,設計開發出能夠及時有效清除對懸浮氣隙精度造成影響的灰塵,進一步提高磁懸浮靜力光輪靜碾壓路機的碾壓精度。
3 結束語
磁懸浮靜力光輪精碾壓路機將磁懸浮支承技術、復合化位置反饋技術、在線檢測與補償技術等組合在一起,可在有效提高施工路面的平整度的同時降低施工周期,完全符合現代路面施工機械的發展趨勢。在認識到磁懸浮靜力光輪精碾壓路機優點的同時,也要認真研究其關鍵技術,并制定出解決對策,為成功研制出滿足生產要求的磁懸浮靜力光輪精碾壓路機提供理論基礎。與傳統的靜力光輪壓路機相比,磁懸浮靜力光輪精碾壓路機有效的提高了自身的信息處理能力,實現了路面平整度的在線檢測和自動補償,具有碾壓精度高、響應速度快、磨損小等優點,既符合公路建筑行業的發展趨勢,又滿足路面機械行業的總體發展要求,具有較好的應用前景。
[1] 姚宏武.淺析碾壓機械在路基施工中的應用[J].中國新技術新產品,2009,(24):128-129.
[2] 史保華,蔡良才,孫濤,黃必斌,梁開俊.機場瀝青道面碾壓機械配置方法[J].交通運輸工程學報,2003,3(4):25-29.
[3] Karin Edvardsson,Rolf Magnusson.Monitoring of dust em ission on gravel roads: Development of a mobile methodology and examination of horizontal diffusion[J].Atmospheric Environment,2009,43(4):889-896.
[4] 趙昱東.壓路機的發展歷程[J].礦山機械,2006,34(12):40-42.[5] 尹繼瑤,梁鳳英.國外壓實機械的發展[J].建筑機械化,2001,(5):37-40.
[6] 吳竟吾.國內外壓路機概況及趨勢[J].工程機械與維修,2005,(5):59-61.
[7] 吳永平.現代壓實技術發展概況[J].筑路機械與施工機械化,2005,(4):1-3.
[8] 張啟君,張忠海,張宏,王華君.國外雙鋼輪振動壓路機的探討[J].筑路機械與施工機械化,2004,(4):47-48.
[9] 張曉靜.全液壓雙鋼輪振動壓路機反拖控制方法研究[D].西安:長安大學,2010.
[10] Stanis!aw Bednarek.Polarization and transm ission of m icrowaves in the magnetic suspension in the applied magnetic field[J].Journal of Magnetism and Magnetic Materials,2011,323(7):957-964.
[11] 南通大學.智能型磁懸浮靜力光輪精碾壓路機[P].201210013129.7,2012-07-19.
[12] 楊怡,陳夢成,雷茂錦.瀝青路面平整度傳遞模型在工程中的應用[J]. 筑路機械與施工機械化,2011,(2):42-45.
