基于DASP系統(tǒng)的水下航行器內(nèi)噪聲監(jiān)測技術(shù)研究*
2013-10-16 08:06:32曲豐吳磊張儀
艦船電子工程 2013年2期
曲 豐 吳 磊 張 儀
(中國人民解放軍91388部隊92分隊 湛江 524022)
1 引言
隨著現(xiàn)代海戰(zhàn)模式的發(fā)展,水下航行器不僅要對付敵方的反潛水面艦船的攻擊,而且需要同時應(yīng)對來自水下、空中和陸上的威脅。全面提高水下航行器攻防能力的一個關(guān)鍵技術(shù),就是強化其綜合隱身性能。在目前的技術(shù)條件下,水下航行器隱身技術(shù)的重要手段是消聲和降噪。噪聲干擾不僅會影響到水下航行器的隱身性能,暴露我方目標(biāo),其振動也可能會影響艙內(nèi)各種儀器儀表、設(shè)備的正常工作。因此,艙內(nèi)噪聲問題日益引起了水下航行器設(shè)計工作者的關(guān)注[1],噪聲頻率范圍和強度已經(jīng)成為必不可少的戰(zhàn)技指標(biāo)。各國在努力降低水下航行器噪聲的同時,相繼開發(fā)了噪聲實時監(jiān)測系統(tǒng),通過有效的測量和聲場特性的監(jiān)測,及時、準(zhǔn)確掌握水下航行器的艙內(nèi)噪聲,不僅可以為水下航行器在戰(zhàn)時調(diào)整航行狀態(tài)、采取有效的規(guī)避措施提供依據(jù),同時也可為本艇調(diào)整并且實施有效的對敵攻擊方案提供決策支持[2]。
2 DASP噪聲實時監(jiān)測系統(tǒng)
基于噪聲實時監(jiān)測技術(shù)的DASP(Data Acquisition and Signal Processing)系統(tǒng)是一套小型化的監(jiān)測系統(tǒng),可實現(xiàn)環(huán)境噪聲測量以及測量數(shù)據(jù)的分析和處理。該系統(tǒng)注重實用、內(nèi)容豐富、功能先進,在爆破測試和地震信號測量等領(lǐng)域均有廣闊的應(yīng)用前景[3]。
2.1 系統(tǒng)組成
測量系統(tǒng)[4]主要由24位信號采集分析儀、ICP聲壓傳感器、空氣壓力傳感器、聲壓校準(zhǔn)器、聲級計、數(shù)據(jù)記錄器、數(shù)據(jù)分析處理機、高頻低噪聲電纜線以及儀器專用箱等組成,如圖1所示。軟件環(huán)境主要由DASP-V10工程版平臺軟件、聲學(xué)測試軟件、三測量技術(shù)和虛擬擴展通道采樣軟件、傳遞函數(shù)分析功能軟件、信號發(fā)生軟件、波形編輯處理軟件、工程測試檢定系統(tǒng)軟件等組成。
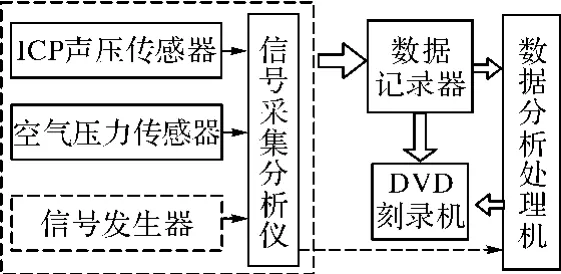
圖1 監(jiān)測系統(tǒng)原理框圖
2.2 系統(tǒng)工作流程[5]
系統(tǒng)工作流程如圖2[6]所示。
系統(tǒng)上電后,運行DASP系統(tǒng)軟件開始工作。設(shè)置相關(guān)參數(shù),初始化系統(tǒng)內(nèi)核,若不需要采集數(shù)據(jù),系統(tǒng)進入待機狀態(tài)。開始工作時點擊軟件界面上的采集按鈕進入信號采集部分,傳感器將采集的信號通過電纜傳輸至信號調(diào)理電路進行濾波、整流、放大處理,模數(shù)轉(zhuǎn)換電路將預(yù)處理后的模擬信號轉(zhuǎn)換為數(shù)字信號進行數(shù)據(jù)緩存,當(dāng)緩存到一定容量后將數(shù)據(jù)傳送到硬介質(zhì)中進行物理存儲,便于事后數(shù)據(jù)的進一步分析。若需要實時數(shù)據(jù)分析,則打開實時處理軟件,進行信號波形的實時顯示以及頻譜分析。事后數(shù)據(jù)分析處理時,DASP系統(tǒng)可調(diào)用存儲數(shù)據(jù)從時域和頻域等方面進行周期、相關(guān)性、功率譜的分析。
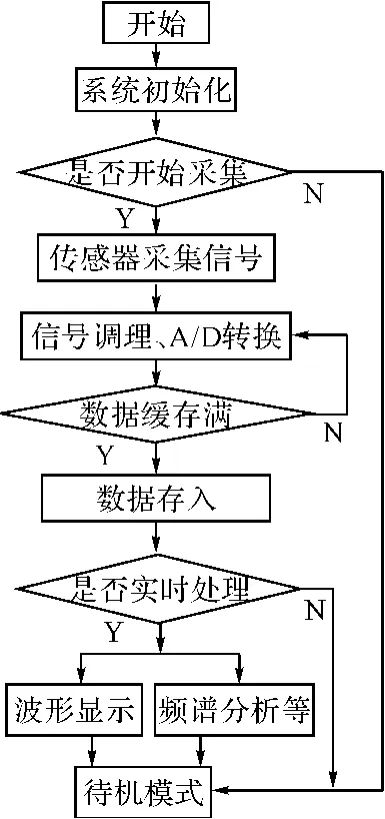
圖2 系統(tǒng)工作流程圖
3 主要數(shù)據(jù)分析處理方法
3.1 時變參量分析[7]
時變參量分析用于分析信號的某個參量隨時間變化的特性,例如對于變化的聲音信號,可以通過時變參量分析得到各個時刻的聲壓級,獲取聲壓級隨時間變化的曲線。時變參量分析從名義上看是分析信號在各個時刻的參量量值,但本質(zhì)上是分析各個時刻開始的一個時間段內(nèi)的參量量值。因此,在DASP的時變參量分析模塊中需要設(shè)置分析點數(shù),對應(yīng)分析的時間段,此外還要設(shè)置分析偏移,對應(yīng)兩次分析(即兩個時間段開始點)的數(shù)據(jù)間隔。例如被分析數(shù)據(jù)長度為A個點,設(shè)置分析類型為有效值,分析點數(shù)為B個點,分析偏移為C點,則DASP將首先從第一點開始取B個點數(shù)據(jù)計算其有效值得到分析結(jié)果的第一個數(shù)據(jù)點,然后從第C點開始再取B個點計算有效值得到結(jié)果的第二點,再后則從第2×C點開始取B個點計算,依次進行,最后可以得到(A-B)/C個點的有效值-時間曲線結(jié)果。
3.2 相關(guān)分析原理
所謂“相關(guān)”是指變量之間的線性關(guān)系。對于確定性信號,兩個變量之間可以用函數(shù)關(guān)系來描述,對于兩個隨機信號之間就不具有這樣的確定性關(guān)系,但是通過大量統(tǒng)計就可以發(fā)現(xiàn)它們之間還是存在具有某種內(nèi)涵的物理關(guān)系。通常相關(guān)分析用于研究兩個信號之間的相關(guān)性,如測定管道損傷位置、判定設(shè)備振動和噪聲與其部件振動的關(guān)系等。相關(guān)分析分為自相關(guān)分析和互相關(guān)分析兩種。
1)自相關(guān)分析:自相關(guān)函數(shù)是描述信號x(t)一個時刻的取值與另一個時刻的取值之間的依賴關(guān)系,其計算公式為

其中:Rx(τ)為相關(guān)函數(shù),x(t)為要分析的信號序列,τ為時間延遲。通常使用相關(guān)系數(shù)來描述相關(guān)性,更具有對比性和方便性。DASP系統(tǒng)提供的就是相關(guān)系數(shù)函數(shù),定義如下:

其中:μx為均值為方差。
2)互相關(guān)分析:互相關(guān)函數(shù)是對兩個信號x(t)和y(t)進行分析的,描述x(t)一個時刻的取值與y(t)另一個時刻的取值之間的依賴關(guān)系,其計算公式為

同樣,互相關(guān)系數(shù)的定義如下:

4 實測數(shù)據(jù)分析
在某海域,水下航行器水下勻速直航,利用DASP系統(tǒng)進行了水下航行器艙室內(nèi)噪聲實時監(jiān)測測量。測量條件:海況三級以下,外部環(huán)境噪聲對艙室內(nèi)干擾可以忽略。截取實時監(jiān)測中的一段數(shù)據(jù)進行分析。通過時變參量分析方法可以分析出這段數(shù)據(jù)中噪聲的最大值,如圖3所示[8]。
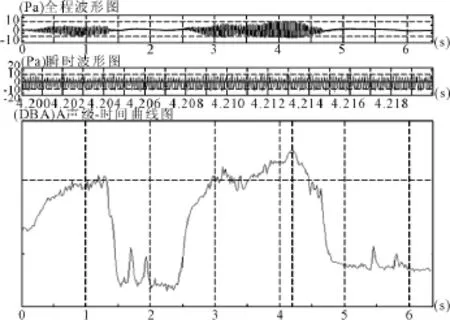
圖3 實測數(shù)據(jù)時變參量分析圖
對這段噪聲數(shù)據(jù)進行自相關(guān)分析,可以看出自相關(guān)系數(shù)大于0.5,則表明該信號中含有周期成份,具體情況如圖4所示[8]。
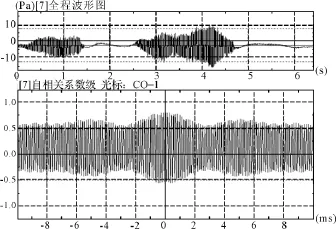
圖4 實測數(shù)據(jù)自相關(guān)分析圖
通過互相關(guān)分析研究系統(tǒng)的時間滯后性質(zhì),對系統(tǒng)兩個采集通道的輸出信號進行自相關(guān)計算,利用互相延時和能量信息可以對傳輸通道進行分析識別,如圖5所示[8],互相關(guān)系數(shù)為0.35,表明噪聲中含有確定性信號,可能來自艙室中某一確定設(shè)備的振動噪聲。進一步分析時,可對水下航行器航速、航深進行調(diào)整,結(jié)合發(fā)射武器時的工況[9],用DASP系統(tǒng)進行噪聲實時監(jiān)測。并在測量的過程中,改變傳感器的位置,將采集的多組數(shù)據(jù)進行分析對比,就可以初步確定較高能量的噪聲具體源于該設(shè)備的某部件,為設(shè)備下步的結(jié)構(gòu)改進提供一定的參考依據(jù)[11]。
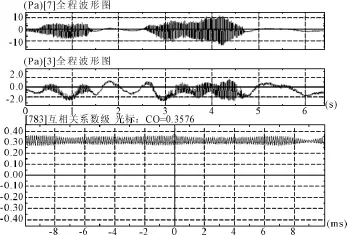
圖5 實測數(shù)據(jù)互相關(guān)分析圖
5 結(jié)語
本文在介紹基于噪聲實時監(jiān)測技術(shù)的DASP系統(tǒng)組成原理和工作流程基礎(chǔ)上,利用海上實測數(shù)據(jù),運用數(shù)據(jù)處理方法進行了驗證。結(jié)果表明,該系統(tǒng)能對水下航行器內(nèi)噪聲信號實時監(jiān)測和顯示,并對隨機信號中的確定性成份進行準(zhǔn)確、可靠的識別。其深入研究將為國內(nèi)更精密水下航行器噪聲監(jiān)測系統(tǒng)的開發(fā)提供一定的參考,同時可為水下航行器的降噪提供數(shù)據(jù)支持,具有明顯的軍事價值。
[1]董一平.船舶艙室噪聲預(yù)報的方法[J].船舶工程,2008(4):13-15.
[2]王飛,王國治.船舶噪聲實時監(jiān)測技術(shù)進展[J].中外船舶科技,2006,47(1):36-42.
[3]李力,湯雙清,高虹亮.工程數(shù)據(jù)采集處理系統(tǒng)及其應(yīng)用[J].水利電力施工機械,2000,21(2):32-35.
[4]施祥.機器設(shè)備噪聲監(jiān)測系統(tǒng)設(shè)計[J].浙江科技學(xué)院學(xué)報,2012,24(3):191-193.
[5]陳嶺麗,馮志華.檢測技術(shù)和系統(tǒng)[M].北京:清華大學(xué)出版社,2005:376-388.
[6]蔡旭東.基于DASP的船舶艙室內(nèi)噪聲信號測量系統(tǒng)研究[J].艦船電子工程,2011,31(10):150-152.
[7]DASP操作使用手冊.北京東方振動和噪聲技術(shù)研究所技術(shù)部編寫,2009,(2).
[8]胡廣書.數(shù)字信號處理理論、算法與實現(xiàn)[M].北京:清華大學(xué)出版社,2003:460-520.
[9]徐亦凡,胡坤 .潛艇螺旋槳空化臨界航速及最小噪聲操縱研究[J].計算機仿真,2012,29(5):32-36.
[10]范文斌,李向.無線網(wǎng)絡(luò)數(shù)據(jù)采集技術(shù)在噪聲監(jiān)測中的應(yīng)用研究[J].計算機與數(shù)字工程,2009,37(8).
[11]朱錫,孫雪榮,石勇.船舶水下結(jié)構(gòu)噪聲數(shù)值計算方法研究概況[J].船舶工程,2004,26(1):9-12.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
