斜導面直線關節碼垛機器人正運動學研究
2013-10-17 13:29:10周新云李鍛能姚松亮鄭秀宏
制造業自動化 2013年21期
周新云,李鍛能 ,姚松亮,鄭秀宏
ZHOU Xin-yun,LI Duan-neng,YAO Song-liang,ZHENG Xiu-hong
(廣東工業大學 機電工程學院,廣州 510520)
0 引言
串并混聯的碼垛機器人結合了串聯機器人工作范圍大的優點和并聯機器人結構剛度大、承載能力強、運動精度高以及位置反解簡單和力反饋控制方便的優點,適合碼垛這種運行負載大、運動范圍廣的工作,逐漸成為了碼垛機器人的一個研究方向[2~7]。機器人的正運動學是實現機器人閉環控制不可缺少的條件。目前,機器人正運動學求解的方法有:幾何法、數值法、代數符號法及解的存在與證明等。
針對混聯碼垛機器人的結構,如圖1所示,通過幾何法,利用構造相似三角形的方法,快速的得到了碼垛機器人的運動學正解。同時,工作空間范圍也是機器人的一個重要指標,通過求解不同參數下的運動空間,證明了,這種求解方法,能夠適應不同的工作范圍。
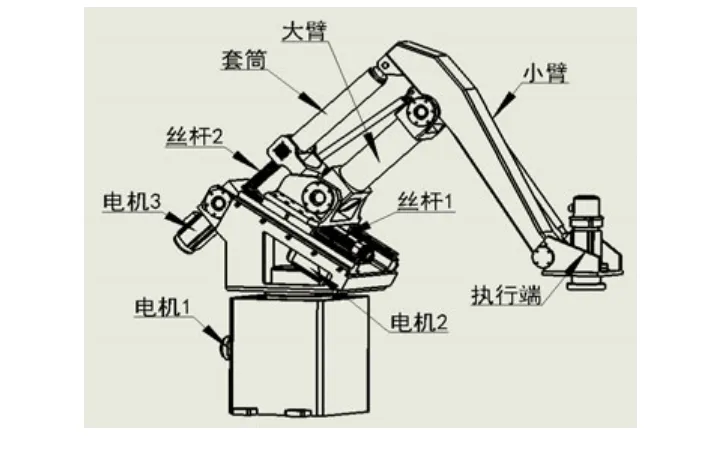
圖1 碼垛機器人實體
1 結構分析
目前碼垛機器人從結構特點上可以分為兩大類。一種是以ABB公司的IRB660為代表的傳統串聯關節型機器人,這種機器人的各個關節通過減速器與電機聯接,構成所謂的串聯機器人。另一種是以FUJI公司研制的Ace系列,主體結構應用了平行四邊形機構,構成混聯聯機構,其驅動采用滾珠絲桿和滾動導軌這類線性驅動元件,依靠機構節點的水平與豎直的運動來實現末端執行器的合成運動[8]。
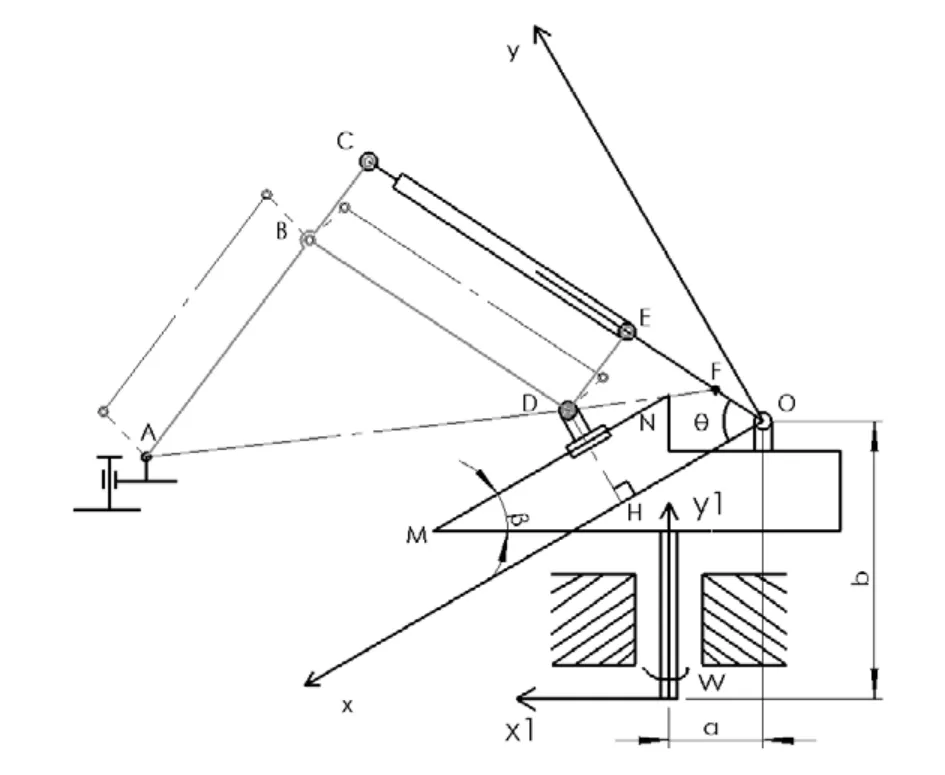
圖2 碼垛機器人機構簡圖
斜導面直線驅動混聯碼垛機器人類似于第二類機器人如圖1所示,但不同的是下方驅動的導軌與水平方向保持一定的傾斜角β,這樣可減小了斜道面絲桿軸向力的大小,使執行點的工作范圍可變。同時上方驅動采用可以改變受力方向的絲桿套筒結構,及直線驅動,這樣使得桿件的受力在一條直線上,驅動里傳遞效率最高,而且整個工作過程絲桿套筒處于受拉的狀態,符合桿件合理受力方式。碼垛機器人的機構圖如圖2所示。包括執行點A、小臂AC、大臂BD,同時構建以大臂小臂為邊的平行四邊形BDCE。OP為絲桿,CE為套筒,OP、CE構成絲桿套筒機構,電機1在O處驅動絲桿。D點在NM斜道面上滑動,D點由平行于NM的絲桿傳動,由電機2驅動,整個斜面平臺及其上部繞y1軸旋轉,由電機3驅動。整個機構構成一個柱坐標。而執行端通過平行四邊形機構保證其始終水平。
只考慮斜面平臺上部的機構,可知桿件數n=6,低副個數Pl=8,高副個數Ph=0。
因此,自由度為:

在斜面平臺下方還有1個旋轉自由度,因此,整個機構的自由度為3。
2 正運動學分析
根據斜導面式混聯碼垛機器人的機構特點,其機構的運動學求解時存在著耦合,本文提出了采用構造相似三角形的方式來推導其正運動學方程[9]。
首先,求機構在平面坐標系O-xy中執行點的坐標。
如圖1所示,O、E、C在同一條直線上,此方向進給量由電機1以點O原點控制輸入。
當OE=0時,此時:

y為OE方向進給量。
設OE與x軸的夾角為θ;取OE上一動點F,使△FED ∽△DBA;則三角形相似比i:

其中:BA=e,ED=c;可求出EF長度為:

其中:EF=f,DB=d;即E,F點的坐標為:

如圖2所示,DH垂直于x軸于H。電機2驅動斜面絲桿,使導板D沿平行于x軸方向運動。
設,當H與O點重合時:

其中x為OH方向進給量;
則D點的坐標為:

其中DH=h。
設A點坐標為Ax,Ay;由i=AD/DF ,則A點坐標為:
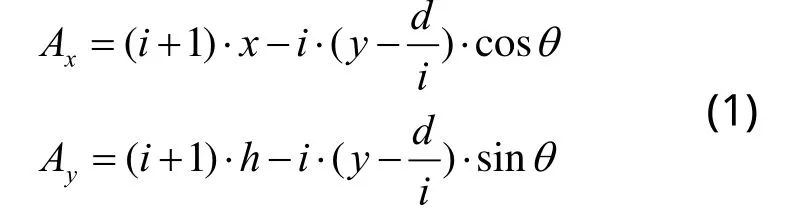
在式(1)中sinθ,cosθ 為未知數。
通過四邊形OHDE可求得θ與x,y的關系。知ED=c,E點和D的坐標,運用兩點間距離公式,即θ與x,y存在著如下關系:

其次,求執行點A點在O-x1y1中的坐標,通過坐標變換,有A點坐標為:

最后,求機構在空間坐標系中執行點與驅動量之間的運動學關系。
在平面坐標系O1-x1y1的原點處,過原點作坐標軸x2垂直于該平面,且z2軸取y1軸,y2軸取x1軸,由x,y,z軸構成空間直角坐標系。設電機3轉動的角度為α。則空間坐標系O-x2y2z2中A點坐標為:
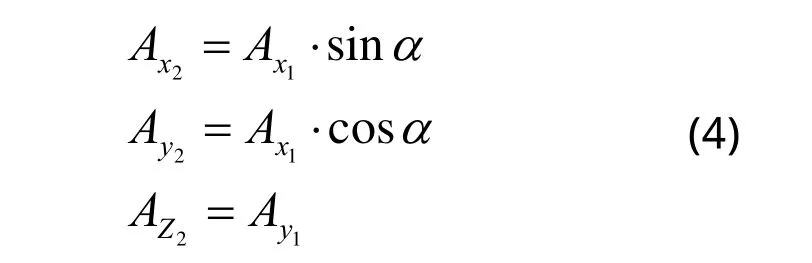
式(1)~式(4)式便是運動學方程的正解,當已知各關節的運動參數,便可求得末端執行器的位置。
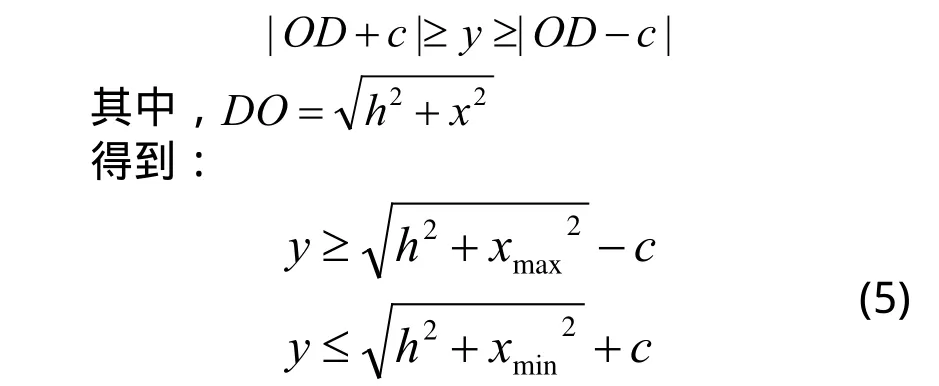
確定電機1和電機2的運動范圍:當取電機1的運動范圍為[xmax,xmin]時,由△DOE三邊的關系可知,y滿足的條件為:
通過上面的推導,可以得出該機器人的運動學結論:碼垛機器人執行點在x軸的運動與三個電機的驅動量有關;y軸的運動與三個電機的驅動量有關;z軸的運動與電機1和電機2的驅動量有關。本文研究的碼垛機器人各軸相互耦合,運動學逆解無法通過上序求得的運動學方程求解。運動正解通過在OE上取動點F,構造相似三角形的方法,使碼垛機器人運動學分析正向求解問題得到簡化;同時,如果需要改變AB的桿長來增大工作空間,以上的運動學分析依然成立。這樣使這種碼垛機器人的應用更靈活。這種方法也可以應用于其他類似的機器人運動學求解。
3 工作空間分析
機器人的工作空間是指其末端能夠到達的空間點的集合,它是機器人學中一重要的研究領域,是評價機器人幾何特性的重要指標。另外,機器人的結構參數主要根據末端參考點所要求達到的工作區域來確定,因此工作空間的分析顯得非常重要。
由于碼垛機器人的運動空間為一個柱坐標,因此這里只分析在O-xy平面的運動軌跡和運動范圍,根據上節求出的運動方程,運用MATLAB,先分析單獨驅動作用下的運動軌跡;然后,分析在傾斜角β取不同值時的工作平面的位置;最后,分析在整體機構不變的情況下改變AB桿長來求得工作平面的位置。
給定參數值:取電機1運動范圍為x=[180,340],相關參數:a=233,b=540,c=150,d=350,e=300,h=142,β=30 。則由式(5)得:電機2的運動范圍為[209,379]。取本碼垛機器人電機2的運動范圍取[220,370]。
電機1單獨驅動時的運動軌跡:當電機2處于y=220、y=270、y=320、y=370這四個位置,電機1給進,得到執行端在Ox1y1平面的運動曲線如圖3所示。
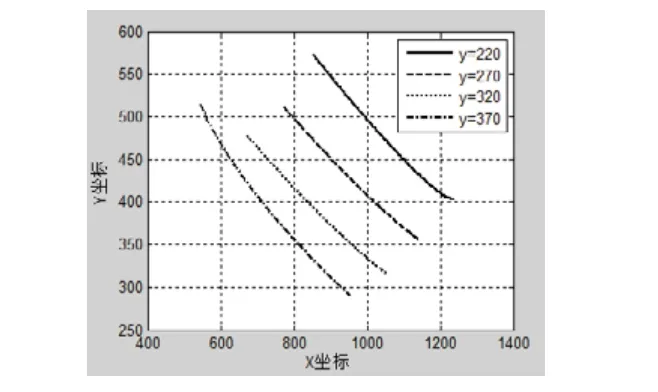
圖3 電機1單獨驅動時的運動曲線(β=30 )
電機2單獨驅動時的運動軌跡:當電機1處于x=180、x=230、x=280、x=340這四個位置,電機2給進時,得到執行端在Ox1y1平面的運動曲線如圖4所示。

圖4 電機2單獨驅動時的運動曲線(β=30 )
由圖3、圖4可知碼垛機器人各軸的運動都是非線性的,且各軸都相互耦合。
在傾斜角β取不同值時碼垛機器人在過z軸的平面的位置:當AB=500,分別取β=0 ,β=30 時碼垛機器人在過z軸的平面上的最大工作范圍如圖5所示。
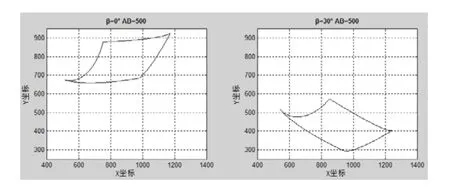
圖5 不同β值下運動平面仿真結果
由圖5可知,與β=0 相比,β=30 時,將工作平面繞圖1的O點旋轉了一個30 ,使得工作空間整體下移。
在AB桿長取不同值時碼垛機器人在過z軸的平面的位置:當β=30 ,取AB=500和AB=700時碼垛機器人在過z軸的平面上的最大工作范圍如圖6所示。
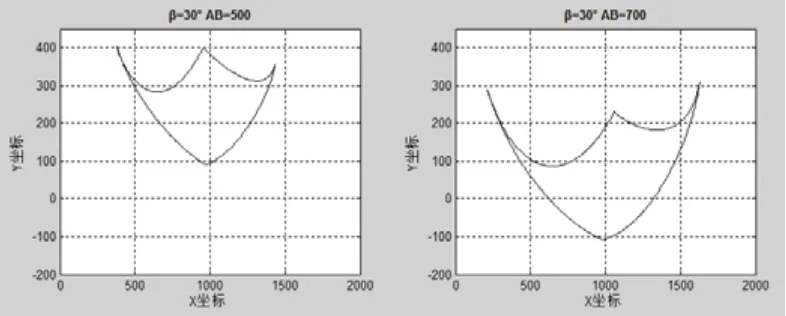
圖6 不同AB桿長下的運動平面仿真結果
由圖6可知,當傾斜角β不變時,通過增加AB桿的長度,會使碼垛機器人在過z軸的平面上的工作范圍下移,并且工作范圍增大。這樣,在系列產品設計中,可通過改變AB的桿長,來設計出不同工作范圍的碼垛機器人,同時,由于AB桿長不同的碼垛機器人,在運動算法上相同,無需大幅度的改變結構,有利于產品的系列化。

圖7 碼垛機器人的工作空間
文章最后運用Solidworks的插入->曲線->通過XYZ點的曲線,來將碼垛機器人在過z軸的平面上的最大工作范圍的邊界點導入到Solidworks中,同將工作平面繞x軸旋轉一周,得到碼垛機器人在參數AB=500,β=30 時的工作空間,如圖7所示。
4 結束語
本文針對一種新型斜導面式碼垛機器人的運動學進行了分析和研究,采用了巧妙的構造相似三角形的方法來求得運動學方程。運用Matlab分析了電機1和電機2單獨驅動時的運動軌跡。采用這種斜導面形式,采用一個角度β可變的變量設計法,可以的碼垛機器人的運動空間范圍進行優化,增加了碼垛機器人的靈活性。
[1] 李成偉,朱秀麗,贠超.碼垛機器人機構設計與控制系統研究[J].機電工程,2008,25(12):81-99.
[2] SpiessJ.Development of high capaeity bagging and palletizinglines . World Cement.1995,26(12,2):52-53.
[3] Hingson Erie.Palletizing robots for the consumer goods in ustrylndustrial Robot,1998,25(6):34-38.
[4] Er1eH.Palletizing robots for the consumer goods industry.Industrial Robot.1998(6):34-38.
[5] GeorgeA,WeiMerIV.New robotics technology adds value to material handling.Palletizing Material Handling Engineering,1998(6):61-62.
[6] 曲云霞,李為民.并聯機構構型概述[J].機械加工工藝與裝備,2007,(2):48-51.
[7] 馬曉麗,陳艾華.并聯機器人機構的創新與應用研究進展[J].機床與液壓,2007,(2):23-237.
[8] 尹春娜.混聯碼垛機器人機構選型設計及最大工作空間分析[J].機電產品開發與創新,2010,24(1):18-20.
[9] 李曉剛,劉晉浩.碼垛機器人的研究與應用現狀、問題及對策[J].包裝工程,2011,32(3):100.
[10] 張曙.并聯運動機床1版[M].北京:機械工業出版社,2003:8-17.
[11]徐金明.MATLAB實用教程2版[M].北京:清華大學出版社,2005:174-178.
