基于輸入整形的起重機消擺控制研究進展
2013-10-20 10:37:02任會禮付玲梅志千高常春李向國孫雷
機械制造與自動化 2013年5期
任會禮,付玲,梅志千,高常春,李向國,孫雷
(1.中聯重科股份有限公司建設機械關鍵技術國家重點實驗室,湖南長沙410013;2.河海大學機電工程學院,江蘇 常州213022)
0 引言
隨著生產規模的擴大,自動化程度的提高,作為物料搬運重要設備的起重機在現代化生產過程中應用越來越廣,作用越來越大,它的運行性能將直接影響到整個生產過程的效率與安全性。
起重機由于吊重慣性與懸索構成的擺系統,在其運行過程中,尤其是在啟動和制動階段,吊重會產生擺動,其擺動幅度與加減速度成一定的比例關系。因此效率要求越高的應用場合,吊重的擺動幅度也越大。目前起重機械自動化程度普遍不高,雖然國內外也有一些具有一定自動化程度的起重機械,但是由于起重機往往作業在諸如船廠、機械加工車間和建筑工地等非結構化的環境,這就對現有的大多數吊重消擺技術實際應用帶來困難,起重機作業更多的還需要依靠司機經驗,誤差難于控制。在起重機械進行裝卸作業時,平均有超過30%的時間浪費在起重機械的對位上。此外,對海上作業的大型起重機械來說,由于起重量大,運行速度快以及受風浪的作用,吊重擺動問題更加突出,一旦發生與結構物的碰撞,將引發災難性的后果,這就對裝卸作業平穩性及安全性提出了更高的要求。一般來說海況等級達到3級時,由于吊重擺動幅度所引起的危險性將導致海上作業的大型起重機械不得不停止作業。據統計,我國東海適合起重機械安全作業的時間僅占總數的34%,而在國外,北海適合起重機械安全作業的時間也不到總時間的一半。
綜上所述,在起重機的啟動和制動過程中如何減小甚至消除吊重的擺動就成為該領域關注的重點問題。近些年來發展出來的起重機消擺實用開環控制技術主要有:輸入指令濾波、輸入指令整形控制等。
1 輸入指令濾波控制
眾所周知,在吊重擺角較小的情況下,龍門吊、行車和橋吊等起重機吊重慣性與懸索可以簡化為式(1)所示的單擺動力學數學模型,


在實際應用中,一般多采用梯形作為吊點或小車速度曲線,即吊點或小車的加速度a是如圖1所示的方波單脈沖信號,由于加速度信號a中具有與式(1)所示系統的固有頻率相同的諧波成分,因此在起重機吊點加速、減速過程結束后,吊重的擺角φ響應將是如圖1所示的等幅震蕩,顯然會對起重機的高效與安全作業帶來不利影響。
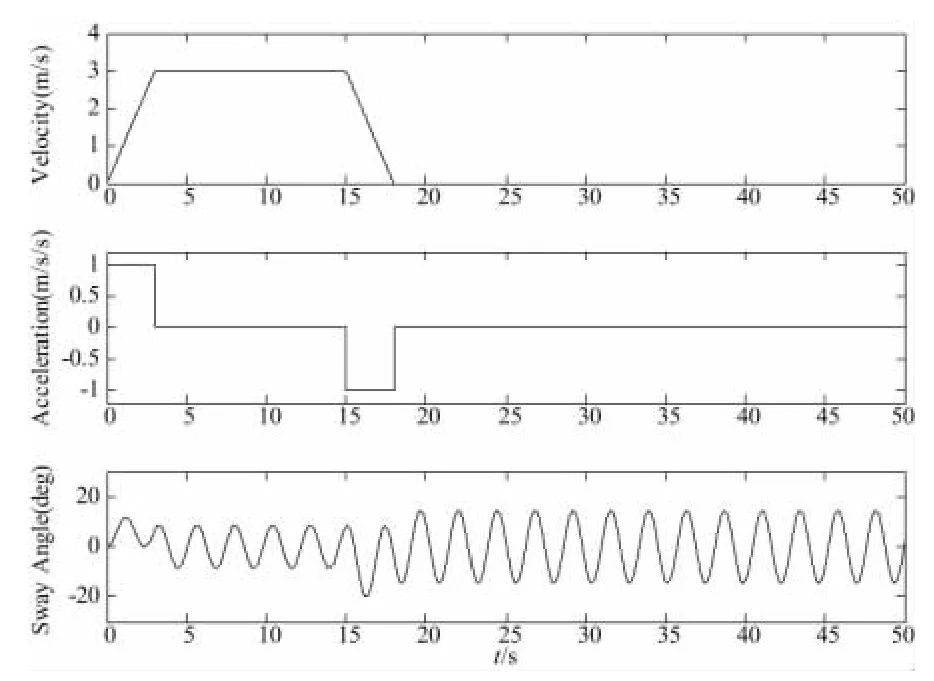
圖1 常規單次加、減速時吊點速度、加速度和吊重擺角曲線
對起重機吊點或小車加速度信號作濾波處理,消除其中與式(1)所示系統的固有頻率相同的諧波成分,以避免產生圖1所示的吊重在加、減速結束后的殘余等幅振蕩就成為抑制起重機吊重擺角波動的自然選擇方法[1]。Parker設計中心頻率為式(1)所示系統固有頻率的輸入整形3階帶阻濾波器,對船用吊桿起重機的回轉、降幅和起升運動的輸入信號中的與吊重擺動的固有頻率相同的諧波成分進行陷波處理,在1/16吊桿起重機物理模型中的應用表明:吊重擺動降幅達18dB,另一方面,由于帶阻濾波器的引入而導致回轉、降幅和起升運動的響應延遲[2]。M.A.Ahmad等采用 Butterworth 3、6、9 階低通濾波器方法,低通濾波器和帶阻濾波器結合LQR最優控制方法分別實現起重機的輸入跟蹤和吊重擺角的波動抑制。分析表明:帶阻濾波器對吊重擺角波動的抑制能力要優于同階的低通濾波器,而且其抑制能力隨著濾波器階次的增加而增強[3,4]。對起重機的輸入加速度信號進行濾波處理,其代價是跟蹤響應速度的降低,即濾波作用普遍存在輸入指令的遲后影響[3-5]。
2 輸入指令整形控制
針對輸入指令濾波控制方法所存在的不足,Smith提出了一種在結構與實現方式上與濾波控制方法不同的控制方法。該方法能夠使輕阻尼或零阻尼系統對起重機吊點或小車的加速度階躍輸入產生無振蕩響應,這種方法最簡單與常見的是把圖1中加速度分兩次完成,在零阻尼的情況下,每次幅值是總加速度幅值的一半,如果第二次加速度脈沖的施加時間為式(1)所示系統的半周期,那么由第一次激勵的等幅振蕩將在式(1)所示系統的半周期時由第二次激勵的等幅振蕩完全抵消,如圖2所示[6,7]。這種對式(1)所示系統中的加速度按照一定序列分多次輸入的方法稱為加速度輸入整形控制,對于一般的輸入稱為輸入指令整形控制器(inputting shaper,簡稱 IS)。
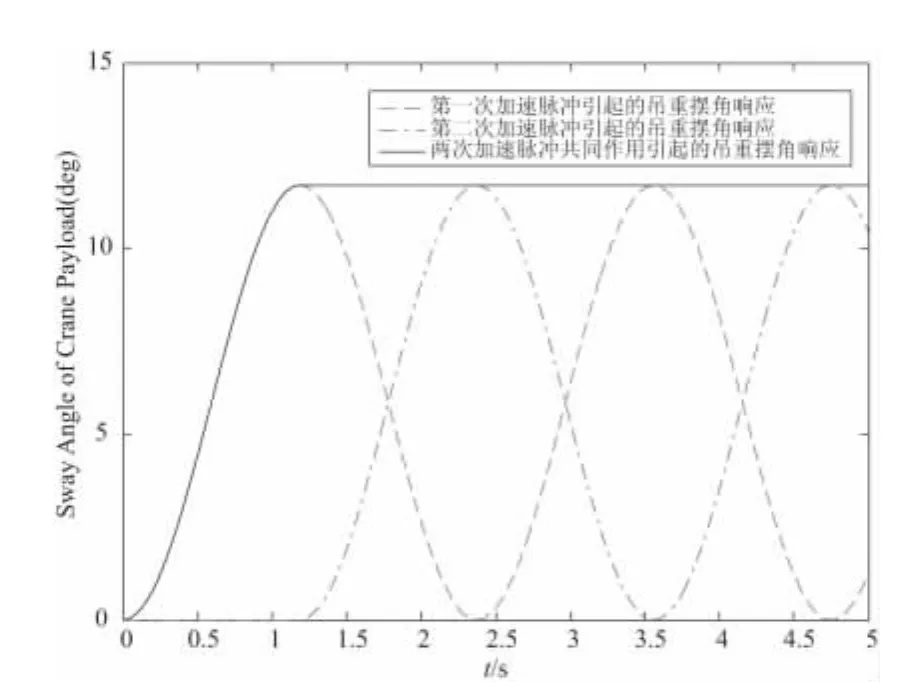
圖2 兩脈沖加速度整形控制消除吊重殘余振蕩
理論上來說,上述方法中加速度整形是通過一稱作整形控制器的脈沖序列與系統加速度參考信號作卷積而實現的。式(2)是以式(1)所示系統在整形控制作用下的響應與單次加速脈沖作用下的響應的百分比值,即采用IS方法所引起的吊重擺角波動相對于式(1)所示系統中實際固有頻率ω的敏感值,該百分比值可以作為IS設計的吊重波動性能指標。

其中:


Ai和ti分別是每次加速度脈沖的幅值大小和作用時間。
上述兩次加速脈沖序列是最簡單的一種輸入整形控制方法。兩次脈沖的幅值與時間使ω與IS中的系統模型頻率ωm相等處的性能指標V=0,也就是式(3)和式(4)要同時為0,即加速或減速結束后吊重擺角的波動為0,因此該方法也稱為ZV法(zero-vibration,ZV)。第一個脈沖發生的時間t1=0,為了與單次加速時的擺角幅值保持一致,必須增加一個約束條件:

約束條件式(3)、式(4)和式(5)可以確定ZV法的三個參數:

理論上,如果起重機在作業過程中懸索長度、線性阻尼不變,即式(1)所示系統的模型參數ω, ζ保持為恒定值,ZV法可以在0.5個理論振蕩周期內,即0.5Td內完全消除由于起重機小車加速所引起的吊重擺角的波動[8]。而在實際起重機作業過程中,系統模型參數尤其是與懸索長度相關的ω的變化不可避免,這就對ZV法在實際的起重機擺角波動抑制控制中的應用帶來了局限性。為了減少ZV法對模型參數的敏感性,學術界提出了ZVD法(zero-vibration and derivative shaper, ZVD)。ZVD 法在ZV法的基礎上,增加了V對ω的變化率在ω與IS中的系統模型頻率ωm相等處為0的約束條件:

與約束條件(2)為0類似,式(7)同樣包含著兩個同時為0的約束條件,這兩個條件與約束條件式(5)與約束條件式(3)、式(4)同時為0一起可以確定三脈沖ZVD法的五個參數:
ZVD法加速脈沖的時間,或消除吊重擺角的波動的時間為一個振蕩周期,即相對ZV延長了0.5Td,這是其不足。ZVD法與ZV法相比其優點是降低了對模型參數的敏感性,提高系統控制的魯棒性。
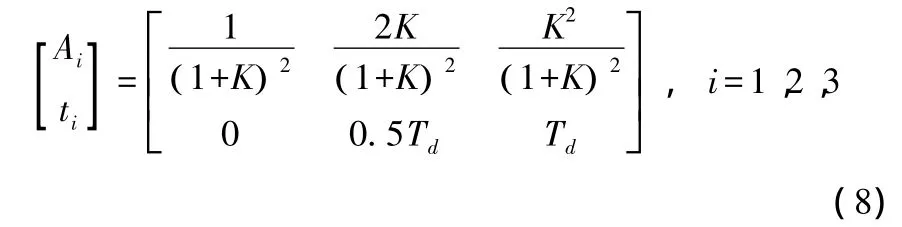
為了進一步降低輸入整形法對模型參數的敏感性,提高魯棒性,可以再增加式(2)相對ω的二階導數為0的約束條件,成為具有四脈沖的ZVDD法。ZVDD法的四個脈沖的對應參數為:

根據對魯棒性的要求,也可以再進一步增加式(2)相對ω的三階導數為0的約束條件,使之成為五脈沖的ZVDDD法。ZVDDD法的五脈沖的對應九個參數分別為:
當然每增加一個關于導數的約束條件,其加速脈沖時間就增加0.5Td,即擺角波動抑制時間就延長0.5Td,消擺的響應速度就要降低。
上述分析表明:消擺控制的魯棒性與消擺速度是一對矛盾,為了增加魯棒性,同時又不增加加速脈沖數,把式(2)在系統實際的固有頻率ω處的V=0的約束條件降低為式(2)具有一定的容許百分比誤差Vtol,該輸入整形法就是 EI法(extra-insensitive shaper,EI)[9]:
3 輸入指令整形控制的魯棒性分析
在起重機作業過程中,由于懸索長度的變化,吊重擺角的動力學模型參數ζ和ω,尤其ω的變化不可避免,也是必不可少的。因此,各種IS方法對模型參數的不敏感性,即魯棒性對于IS方法在起重機吊重消擺的實際應用至關重要。
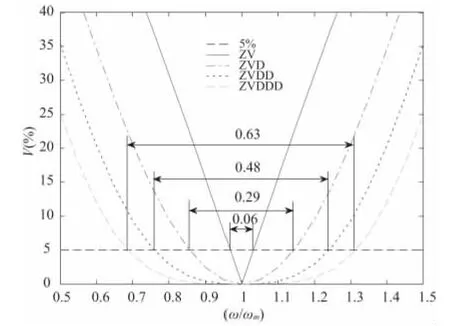
圖 3 ζ=0 和 Vtol≤0.05(5%)時 ZV,ZVD,ZVDD和ZVDDD的敏感曲線與不敏感度
為了比較各種IS方法的魯棒性,定義采用IS方法所引起的吊重擺角波動相對于式(1)所示系統中實際固有頻率ω的敏感值,即百分比V≤Vtol時的系統固有頻率ω的變化范圍,或不敏感度作為魯棒性評價指標,即頻率范圍越寬魯棒性越強。圖3是ζ=0,Vtol=0.05 5%( )時,ZV,ZVD,ZVDD和ZVDDD四種輸入整形控制方法的魯棒性比較,圖3表明ZV,ZVD,ZVDD和ZVDDD四種輸入整形控制方法的實際頻率ω與模型頻率ωm之比變化范圍分別為 0.06,0.29,0.48 和0.63,即實際頻率 ω 容許變化范圍 是 [0.97ωm,1.03ωm] , [0.85ωm,1.15ωm],[0.76ωm,1.24ωm] 和 [ 0.685ωm,1.315ωm]。該變化范圍越大表示輸入整形控制方法的魯棒性越強。上述變化范圍對應的吊重懸索容許變化范圍分別為分別在[0.94lm,1.06lm] , [0.756lm,1.38lm],[0.65lm,1.73lm] 和 [0.58lm,2.13lm]變化,lm是相對于消擺控制方法中模型頻率ωm的模型懸索長度,擺角波動的百分比仍然V≤Vtol5%( ),明顯地隨著脈沖數量的增加,魯棒性增強。但是從式(6)、式(8)、式(9)和式(10)魯棒性的增強是以對應IS法擺角波動抑制的響應速度的降低作為代價的[9]。
圖4 和圖5 分別是 ζ=0.05、0.2,Vtol=0.05 5%( )時,ZV,ZVD,ZVDD和ZVDDD四種輸入整形控制方法的魯棒性比較,表明阻尼的增加四種整形方法的魯棒性得到了增強。

圖4 ζ=0.05、Vtol=0.05(5%)時,ZV,ZVD,ZVDD和ZVDDD四種輸入整形控制方法的魯棒性比較

圖5 ζ=0.2、Vtol=0.05(5%)時,ZV,ZVD,ZVDD和ZVDDD四種輸入整形控制方法的魯棒性比較
圖6是ZVD法與三種EI法的魯棒性比較,由式(8)、式(11),ZVD法與EI法的加速脈沖時間,即消擺速度是相同的,在ζ=0的情況下,ZVD法系統實際頻率ω與模型頻率ωm之比變化范圍分別為0.29,而即使變化范圍最小的單峰EI法,其系統實際頻率ω與模型頻率ωm之比變化范圍也達到0.4。因此EI法不降低消擺速度,可改善輸入整形控制法的魯棒性。

圖6 EI法與ZVD法的魯棒性比較
圖7、圖8 和圖9 分別是 ζ=0、0.05 和0.2 時,單峰、雙峰和三峰三種輸入整形控制方法的魯棒性比較,三圖表明隨在系統阻尼的增加上述EI法的魯棒性也相應得到了增強。

圖7 ζ=0時,各種EI法的魯棒性比較
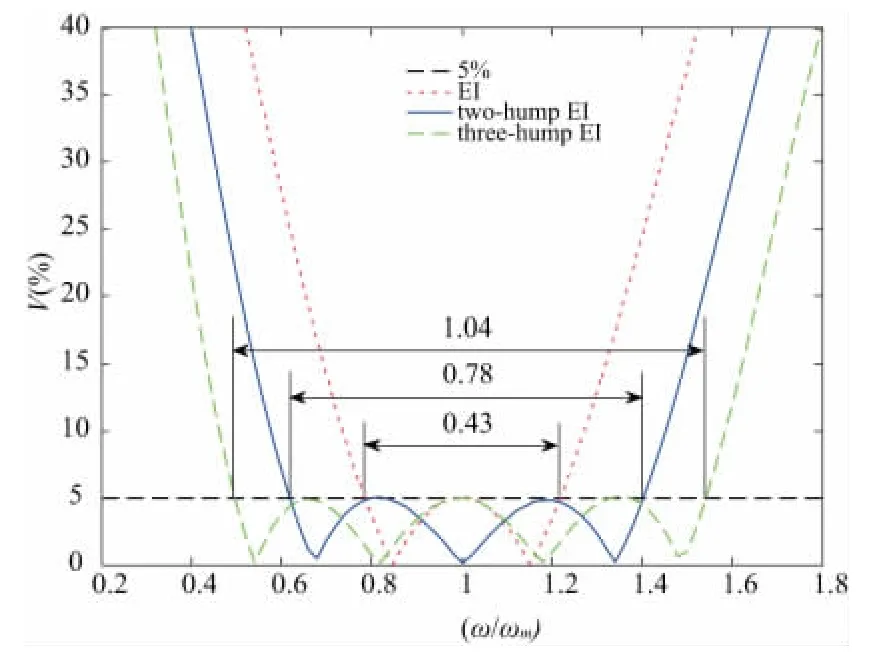
圖8 ζ=0.05時,各種EI法的魯棒性比較

圖9 ζ=0.2時,各種EI法的魯棒性比較
4 輸入指令整形控制在起重機消擺控制中的應用
正是由于具有魯棒性強,只需要對輸入信號與脈沖序列進行卷積運算,而不需要反饋控制,從而控制系統結構、算法簡單的優點,因此IS方法在起重機吊重消擺控制中得到了廣泛的應用。
在起重機的實際應用中,死區、摩擦、傳動部件的間隙、飽和和加速度限制等是無法回避的非線性因素。在輸入整形控制中考慮逆死區、逆間隙方法可以降低由于死區引起的吊重擺角額外波動,在10t橋吊上的實驗表明:即使在死區范圍不確定的情況,上述方法仍然可以有效地抑制吊重擺角額外波動[10]。摩擦采用庫倫+粘性阻尼進行建模,通過適當的持續激勵信號對摩擦模型參數進行離線辨識,以辨識的摩擦模型作為補償依據和輸入整形控制技術共同作用解決摩擦影響,并在塔吊的實驗平臺上進行了有效性驗證[11]。一般的輸入指令整形控制作用在起重機小車位置控制環的外部,即開環整形控制方式(outsidethe-loop input shaping,OLIS),但是在起重機驅動源的飽和和加速度限制因素不可忽略的的情況下,把整形控制器加在起重機小車位置控制環控制器的輸出端,即采用閉環整形控制方式(closed-loop signal shaping,CLSS),在10t橋吊、便攜式實驗橋吊和塔吊上的實驗表明:對由于飽和、加速度限制等非線性對起重機吊重擺角波動抑制,CLSS比采用 OLIS 要優越[12]。
輸入指令整形控制技術不僅對如式(1)所示的線性系統的吊重擺角波動抑制有效,而且對如塔吊等回轉式起重機的非線性系統的吊重擺角波動抑制也有效。采用傳統的整形控制技術時,由于塔吊的回轉運動使第二次的加速度脈沖在方向上與第一次的加速度脈沖間存在角度差,從而影響整形控制技術對回轉式起重機其吊重擺角波動的抑制效果。解決方法是在兩次加速度脈沖中各增加一個徑向分量,使兩次脈沖前后保持相同方向,以達到與整形控制技術在行車、龍門吊和橋吊等線性動力學系統中類似的吊重擺角波動的抑制效果[13]。
如果在起重作業中懸索長度變化較大,即在吊重動力學系統的固有頻率在作業過程變化較大的工況下,整形控制的脈沖頻率采用吊重動力學系統在作業過程中的平均固有頻率,數值仿真表明吊重擺角的波動的抑制效果比采用吊重動力學系統的初始固有頻率值的傳統整形控制要好,在15t龍門吊上的實驗也驗證了上述結論[14]。集裝箱起重機的吊重慣性與懸索是一簡化的二級擺動力學系統,因此用傳統的多脈沖加速度整形控制方法不能夠帶來理想的集裝箱擺角波動的抑制效果;另一方面這種起重機駕駛室往往是與小車一起運動的,因此利用傳統的多脈沖整形控制方法的多次加、減速會使司機的操作環境變差,不符合人機工程的設計原則。采用平面四連桿機構對集裝箱起重機的懸索建模,結合懸索擺角的相平面軌跡對ZV整形控制進行設計,仿真結果表明比傳統的基于單擺動力學數學模型設計的ZV整形控制具有更好的效果[15]。
5 結論
本文分析了兩大類輸入整形控制法的魯棒性與消擺速度問題。對于每一類輸入整形控制方法,魯棒性的增強往往導致消擺速度的降低,即消擺控制的魯棒性與速度存在矛盾。同時從消擺魯棒性兼具速度的角度,EI輸入整形控制方法具有更好的綜合性能,而在起重機吊重擺動動力學模型參數,尤其是固有頻率變化不大的前提下,ZV類方法的魯棒性比EI法的魯棒性要強,在實際應用中應該根據起重機的作業的實際情況,綜合兩者優點來采用。
[1]Rush D.Robinett,Gordon G.Parker,John T.Feddema,Clark R.Dohrmann,Ben J.Petterson.Sway control method and system for rotary crane.USA Patent,No.5908122,June.
[2]Gordon G.Parker.Experimental Verification of a Command Shaping Boom Crane Control System[C].Proceedings of the American Control Conference,San Diego,California,June 1999.
[3]M.A.Ahmad,M.S.Ramli,R.M.T.Raja Ismail.Infinite Impulse Response Filter Techniques for Sway Control of a Labscaled Rotary Crane System[C].2010 Second International Conference on Computer Modeling and Simulation,192-196.
[4]M.A.Ahmad,F.R.Misran,M.S.Ramli,R.M.T.Raja Ismail.Experimental Investigations of Low pass Filter Techniques for Sway Control of a Gantry Crane System[C].
[5]Hanafy M.Omar.Control of Gantry and Tower[D].Blacksburg,Virginia:Virginia Polytechnic Institute and State University,2003.
[6]Smith,O.J.M.Posicast Control of Damped Oscillatory Systems[J].Proceedings of the IRE,vol.45,no.September,pp.1249-1255,1957.
[7]Smith,O.J.M.Feedback Control Systems,pp.331– 345,New York:McGraw-Hill Book Company,Inc.,1958.
[8]singer,N.C.and Seering,W.P.Preshaping command inputs to reduce system vibration[J].ASME Journal of Dynamic Systems,Measurement,and Control,vol.112,pp.76-82,1990.
[9] Joshua Vaughan,Aika Yano,William singhose.Comparison of robust input shapers[J].Journal of Sound and Vibration 315(2008)797-815.
[10] Khalid L.Sorensen,Patrick W.Cross,William E.singhose,Shashvat Prakash.Analysis and Mitigation of Dead-Zone Effects on System Using Two-Impulse ZV Input Shaping[C].2007 Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference,DETC2007,v 5 PART B,p 991-1000,2008.
[11]Hanafy M.Omar.Control of Gantry and Tower[D].Blacksburg,Virginia:Virginia Polytechnic Institute and State University,2003.
[12]John R.Huey,Khalid L.Sorensen,William E.singhose.Useful applications of closed - loop signal shaping controllers.Control Engineering Practice 16(2008)836-846.
[13]D.Blackburn,W.singhose,J.Kitchen,V.Patrangenaru,J.Lawrence.Advanced Command Shaping Algorithm for Nonlinear Tower Crane Dynamics[C].The 8th International Conference on Motion and Vibration Control(MOVIC 2006).
[14]William singhose,Lisa Porter,Michael Kenison,Eric Kriikku.Effects of hoisting on the input shaping control of gantry cranes[J].Control Engineering Practice,8(2000)1159-1165.
[15] Ziyad N.Masoud, Mohammed F. Daqaq. A Graphical Approach to Input-Shaping Control Design for Container Cranes with Hoist.IEEE Transactions on Control Systems Technology,Vol.14,No.6,November 2006:1070-1077.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
兒童故事畫報(2013年3期)2013-06-24 05:40:30