雙層單點(diǎn)自動(dòng)調(diào)整水平基準(zhǔn)平臺(tái)的研制
2013-10-20 10:37:02殷劍萍
機(jī)械制造與自動(dòng)化 2013年5期
殷劍萍
(南京電表廠,江蘇南京210000)
0 引言
車載水平基準(zhǔn)平臺(tái)在很多領(lǐng)域有著廣泛的需求和應(yīng)用,如一些測(cè)量?jī)x器需要用高精度水平平臺(tái)作基準(zhǔn),一些軍用裝備如兩坐標(biāo)雷達(dá)天線等也需要水平平臺(tái)作基準(zhǔn)。目前調(diào)整車載水平平臺(tái)的方法,都是對(duì)承載車輛進(jìn)行整體調(diào)平。在車身四角安裝支撐腿,通過對(duì)支撐點(diǎn)高度的調(diào)整,使平臺(tái)達(dá)到水平。結(jié)構(gòu)按支撐點(diǎn)分為三點(diǎn)調(diào)平、四點(diǎn)調(diào)平和六點(diǎn)調(diào)平等,結(jié)構(gòu)笨重,調(diào)整復(fù)雜。這些方法只適用于那些質(zhì)量在十幾甚至幾十噸的重載裝備,對(duì)于質(zhì)量在幾十至幾百千克重的荷載就顯得不太合適。雙層單點(diǎn)自動(dòng)調(diào)整水平基準(zhǔn)平臺(tái),采用了與目前不同的調(diào)平支撐結(jié)構(gòu),其結(jié)構(gòu)輕巧、安裝固定可靠,調(diào)平方式簡(jiǎn)便,是一種只對(duì)車載設(shè)備本身進(jìn)行調(diào)平的車載平臺(tái),雙層單點(diǎn)自動(dòng)調(diào)整水平基準(zhǔn)平臺(tái)的研制,彌補(bǔ)了目前使用的調(diào)平方法存在的不足,滿足了輕量化裝備對(duì)水平基準(zhǔn)平臺(tái)的需求。
1 平臺(tái)結(jié)構(gòu)的設(shè)計(jì)
為了滿足水平基準(zhǔn)平臺(tái)固定安裝于運(yùn)載車輛上的要求,平臺(tái)結(jié)構(gòu)必須輕巧,安裝固定可靠,調(diào)平快速、簡(jiǎn)便。平臺(tái)設(shè)計(jì)為上下兩層,每層由兩平行軸鉸接支撐固定,由伺服電動(dòng)機(jī)驅(qū)動(dòng)蝸桿絲杠減速升降機(jī)升降調(diào)平。設(shè)計(jì)的平臺(tái)結(jié)構(gòu)如圖1所示。

圖1 基準(zhǔn)平臺(tái)結(jié)構(gòu)示意圖
下層平面(B)上的y1軸與y1'軸是平行的二軸,以鉸接方式分別與固定在機(jī)座上的支架和升降機(jī)(Ⅰ)連接,升降機(jī)(Ⅰ)以鉸接方式固定在機(jī)座上。上層平面(A)上的x軸與x'是平行的二軸,以鉸接方式分別與固定在下層平板上的支架和升降機(jī)(Ⅱ)連接,升降機(jī)(Ⅱ)以鉸接方式固定在下層平面上。下層平面在升降機(jī)(Ⅰ)的上下運(yùn)動(dòng)作用下可繞y1轉(zhuǎn)動(dòng)一定的角度。上層平面在升降機(jī)(Ⅱ)的上下運(yùn)動(dòng)作用下可繞x轉(zhuǎn)動(dòng)一定的角度。下層的升降機(jī)(Ⅰ)與上層的升降機(jī)(Ⅱ)各控制一個(gè)方向的傾斜角度,上層平面在x軸方向的傾斜角度,隨著下層平面的調(diào)整而調(diào)整,上層平面在y軸方向的傾斜角度由升降機(jī)(Ⅱ)調(diào)整,這樣上層平面就可實(shí)現(xiàn)在x軸和y軸兩個(gè)方向上傾斜角的調(diào)整。上層為承載層,設(shè)備安裝于上層。
如圖1所示,結(jié)構(gòu)采用一個(gè)固定點(diǎn)和三個(gè)鉸接點(diǎn)支撐,其優(yōu)點(diǎn)在于:鉸接點(diǎn)支撐的層面傾斜角度,隨著升降機(jī)的上下運(yùn)動(dòng)而變化,升降機(jī)自身也隨著層面傾斜角度的變化而改變支撐角度,并且支撐穩(wěn)定,不會(huì)發(fā)生支撐不實(shí)情況,也不會(huì)出現(xiàn)搖擺倒伏、干涉咬死等現(xiàn)象。
根據(jù)需要,在每層平面上也可選用兩個(gè)升降機(jī)安裝在平面的兩個(gè)角上來頂推平面,用以分擔(dān)平面載荷,升降機(jī)傳動(dòng)配置為串聯(lián)組合來實(shí)現(xiàn)同步升降,因其調(diào)平原理與單個(gè)升降機(jī)在中間位置頂推平面相同,故在此不作討論。
升降機(jī)采用蝸桿絲杠減速機(jī)構(gòu),電動(dòng)機(jī)驅(qū)動(dòng)蝸桿轉(zhuǎn)動(dòng)(也可以手動(dòng)),蝸桿帶動(dòng)蝸輪旋轉(zhuǎn),蝸輪帶動(dòng)絲杠旋轉(zhuǎn),絲杠推動(dòng)活動(dòng)螺母上下運(yùn)動(dòng)。蝸桿絲杠減速機(jī)構(gòu)具有結(jié)構(gòu)緊湊,工作可靠,靜止時(shí)自鎖性能好,電動(dòng)、手動(dòng)兩用,制造成本低等優(yōu)點(diǎn)。結(jié)構(gòu)見圖2。

圖2 升降機(jī)結(jié)構(gòu)圖

式中:P1——輸入功率(kW);T1——輸入扭矩(Nm);n1——輸入轉(zhuǎn)速(r/min)。

式中:W——單臺(tái)升降機(jī)當(dāng)量載荷(N);L1——絲杠螺距(mm);i——減速比;π——圓周率;η——升降機(jī)的綜合效率;T0——空載扭矩(Nm)。

式中:V——升降機(jī)活動(dòng)螺母升降速度mm/min;

確保PCR>W(wǎng)×SF
式中:PCR——臨界載荷(N);d3——絲杠底徑(mm);fm——支撐系數(shù)(兩端支撐fm=105);La——作用點(diǎn)間距離(mm);W——單臺(tái)升降機(jī)當(dāng)量載荷(N);SF——安全系數(shù)(一般SF=4)。


式中:nc——臨界轉(zhuǎn)速(r/min);d3——絲杠底徑(mm);fn——長(zhǎng)度系數(shù)(軸端自由fn=0.36);Lb——支撐間距離(mm);ns——絲杠轉(zhuǎn)速(r/min);n1——輸入轉(zhuǎn)速 (r/min);i——減速比;確保:nc>ns
2 調(diào)平原理及方法
已知,兩條相交直線或兩條平行線可確定一個(gè)平面,當(dāng)一個(gè)平面上有兩條相交直線是水平的,就能確定該平面是水平平面。因此,只要將一個(gè)平面中的兩條相交直線調(diào)水平,這個(gè)平面就水平了。
雙層單點(diǎn)自動(dòng)調(diào)整水平基準(zhǔn)平臺(tái)(參見基準(zhǔn)平臺(tái)結(jié)構(gòu)示意圖)就是據(jù)此原理設(shè)計(jì)的。通過調(diào)整一個(gè)點(diǎn)(Ⅰ)的高低使得A平面上一條直線(x軸線、x'軸線)達(dá)到水平,再調(diào)整另一個(gè)不同方向的點(diǎn)(Ⅱ),使得同一平面上的另一條與之垂直相交的直線(y軸線、y'軸線)達(dá)到水平,因?yàn)锳平面上有兩條相交直線達(dá)到水平,所以A平面就調(diào)整水平了。
為了得知平臺(tái)與標(biāo)準(zhǔn)水平面的傾斜角度,采用雙軸液體擺式水平傳感器測(cè)量平臺(tái)在x軸方向和y軸方向的傾斜角θx和θy,計(jì)算機(jī)系統(tǒng)將傾斜角與設(shè)定誤差角δx、δy進(jìn)行比較,依據(jù)比較結(jié)果判斷基準(zhǔn)平臺(tái)A平面四個(gè)角的高低。由控制系統(tǒng)先控制升降機(jī)(Ⅰ)的上升或下降來調(diào)整B平面在x軸方向的傾斜角度,A平面在x軸方向的傾斜角隨B平面調(diào)整,直到使x軸和x'軸達(dá)到水平狀態(tài)。再控制升降機(jī)(Ⅱ)的上升或下降來調(diào)整A平面在y方向上的的傾斜角度,直到使y軸和y'軸達(dá)到水平狀態(tài)。A平面達(dá)到水平,至此調(diào)平結(jié)束。
3 控制系統(tǒng)原理

式中:ρ——電解液的電阻率;Lx——上下電極間形成的液體電阻等效導(dǎo)電距離;Sx——上下電極間形成的液體電阻等效面積。
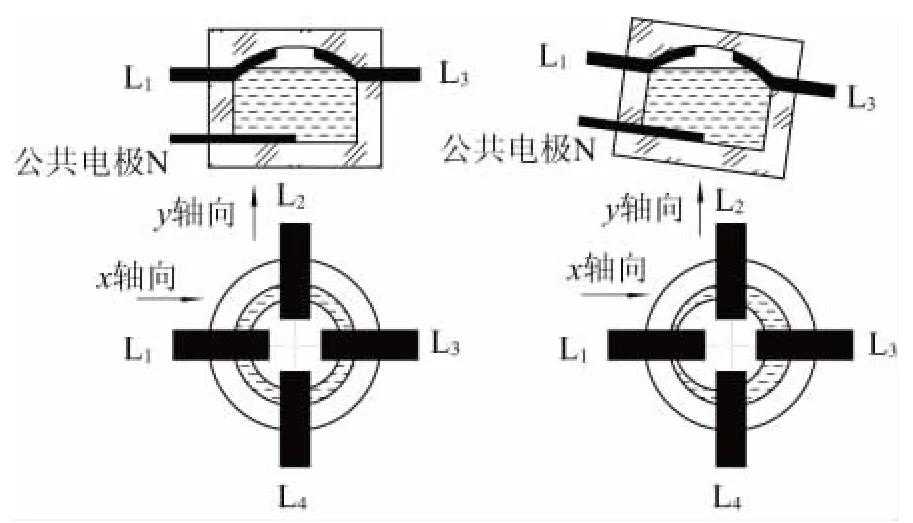
圖3 雙軸水平傳感器結(jié)構(gòu)圖
當(dāng)殼體水平時(shí),頂部四個(gè)電極浸入在電解液中的深度相同,四個(gè)電極與電解液的接觸面積相同,形成的四個(gè)電阻值相等,即Rx=R1=R2=R3=R4。當(dāng)傳感器傾斜時(shí),液面因?yàn)橹亓Ρ3炙剑@時(shí),電極浸入在電解液中的深度發(fā)生了變化,電極與電解液的接觸面積也發(fā)生了變化,即Lx和Sx發(fā)生了變化,導(dǎo)致電極與電解液形成的電阻值Rx發(fā)生了變化。
將每個(gè)軸向的一對(duì)電極分別與兩個(gè)精密電阻組成一橋路電路,如圖4所示。

圖4 橋路電路示意圖
在公共電極和固定電阻的兩端加上電壓,當(dāng)傳感器水平時(shí),氣泡在中間位置,Rx=R0電橋平衡,輸出電壓U'x=0。當(dāng)傳感器傾斜時(shí)Rx發(fā)生了變化,此時(shí)Rx≠R0,電橋失去平衡,輸出電壓U'x≠0,輸出電壓的極性與傳感器的傾斜方向有關(guān),大小與傾斜角呈線性關(guān)系,dUx'=Kdθ,式中K為比例常數(shù)。據(jù)此可以確定平臺(tái)的傾斜方向和傾斜多少,經(jīng)計(jì)算機(jī)系統(tǒng)的比對(duì)判斷,確定升降機(jī)的運(yùn)行方向。
4 結(jié)語
在一個(gè)平面上將一個(gè)傾斜平面調(diào)整水平,一般需要在三點(diǎn)上共同調(diào)整才能實(shí)現(xiàn)。在研制雙層單點(diǎn)自動(dòng)調(diào)整水平基準(zhǔn)平臺(tái)中,從調(diào)平的基本原理入手,簡(jiǎn)化了問題的復(fù)雜性。將一個(gè)平面上兩個(gè)方向的傾斜角,分解成兩個(gè)層面上分別在x方向和y方向的單一方向傾斜角,通過每層只調(diào)整一個(gè)點(diǎn)就可以將上層傾斜平面調(diào)整至水平,實(shí)現(xiàn)在 2min內(nèi)完成調(diào)平,水平精度優(yōu)于2'。平臺(tái)結(jié)構(gòu)簡(jiǎn)單可靠,調(diào)平精度高、方法簡(jiǎn)便,適用于有較高水平精度要求的車載平臺(tái)。
[1]季長(zhǎng)路、張家鈺.液體擺傳感器及其特性[J].傳感器技術(shù),2001,20,(6).
[2]季長(zhǎng)路,張家鈺.激光基準(zhǔn)信標(biāo)儀的研制[J].安徽機(jī)電學(xué)院學(xué)報(bào),2000,15(1):31-33.
[3]戴仁慈,李強(qiáng)生,胡嘉,等.電解液式傾斜傳感器及其數(shù)據(jù)處理系統(tǒng)[J].應(yīng)用科學(xué)學(xué)報(bào),1989,7(4):341-343.
[4]翟羽健,倪江生.重型載體多點(diǎn)位自動(dòng)調(diào)平技術(shù)[J].中國(guó)機(jī)械工程,1994,5(5).62-63.
[5]倪江生,翟羽健.雷達(dá)天線座車調(diào)平問題的研究[J].測(cè)控技術(shù),1994,13(4):36-39.
[6]路杰,史雨輝.高精度自動(dòng)化水平基準(zhǔn)裝置中微米級(jí)微位移平臺(tái)的應(yīng)用[J].大地測(cè)量與地球動(dòng)力學(xué),2011,31(2):145-148.
[7]孟士超,李彥征,劉偉,等.慣性平臺(tái)姿態(tài)在高精度搖擺臺(tái)上的標(biāo)校方法[J].中國(guó)慣性技術(shù)學(xué)報(bào),2009,17(2).
[8]許自富,阮安路,韓瑋,等.激光型基準(zhǔn)平臺(tái)的研制[J].計(jì)測(cè)技術(shù),2006(05).
[9]蔣有才,張彥斌,李皓,等.基準(zhǔn)平臺(tái)調(diào)平單元在線測(cè)試的研究[J].測(cè)試技術(shù)學(xué)報(bào),2001(02).
[10]張?jiān)鎏?機(jī)動(dòng)式雷達(dá)自動(dòng)架撤系統(tǒng)的結(jié)構(gòu)設(shè)計(jì)[J].雷達(dá)科學(xué)與技術(shù),2004,2(6).
猜你喜歡
美與時(shí)代·美術(shù)學(xué)刊(2022年3期)2022-04-27 01:18:15
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
火花(2019年12期)2019-12-26 01:00:28
人大建設(shè)(2019年12期)2019-05-21 02:55:32
學(xué)苑創(chuàng)造·A版(2015年11期)2016-01-14 09:03:27
小天使·一年級(jí)語數(shù)英綜合(2015年2期)2015-01-14 06:35:05