基于ACR9000的模擬運動平臺控制軟件的開發
2013-10-22 12:49:26翁運波周驥平李鷺揚
機械工程與自動化 2013年1期
關鍵詞:調試
翁運波,周驥平,李鷺揚
(揚州大學 機械工程學院,江蘇 揚州 225127)
0 引言
模擬運動平臺[1]可以動態地提供所需的位置和姿態。在平臺運動過程中,要完成對平臺的運動控制,同時要對大量數據進行采集。對于大振幅、高頻率的往復運動,以往的模擬運動平臺都采用插補算法來實現控制,響應速度不夠。另外,若以1 ms為周期對數據進行采集[2-4]時,同時要使多種類型數據的采集在時間上對應,如果單純地從硬件上來實現,費用會很高。
本文利用ACR9000控制器的電子凸輪模式來實現運動平臺的控制。由于電子凸輪采用時基機制,精度高,響應速度快[5],易于實現任意復雜的曲線運動。
1 需求分析
模擬運動平臺控制軟件的客戶需求定義如下:要求完成對運動平臺位姿的手動調節;運動平臺能夠完成大振幅、高頻率的往復運動;要求軟件能夠完成對計算數據的檢查、對工作空間的判斷,并自動生成執行文件并執行;能夠對運動平臺運動時的位姿進行模擬。對于數據采集,要求能夠對采集通道完成校準功能;要對7個通道的模擬量數據和1個數字量數據采集,同時讀取運動平臺的位姿;要求在同一時間對這些數據進行采集,采集周期為1 ms。
2 模塊劃分
在對系統的需求進行深入分析后,確定該軟件的主要模塊包括文件管理模塊、顯示模塊、設置模塊、操作模塊和調試模塊。運動平臺控制系統的總體結構如圖1所示。
3 設計與實現
基于用戶需求定義及系統功能分析,采用面向對象的方法對系統進行詳細設計。軟件的設計包括動作類、機構計算類、控制類、定時器類、采集類設計及用戶交互界面設計,故在設計時分為動作類(CAct Class)、機構計算類(CMach Para)、控制類(CAcr NCSysInf o)、定時器類(CMMTi mer)和采集類(CDc Data)。各類之間的關系如圖2所示。
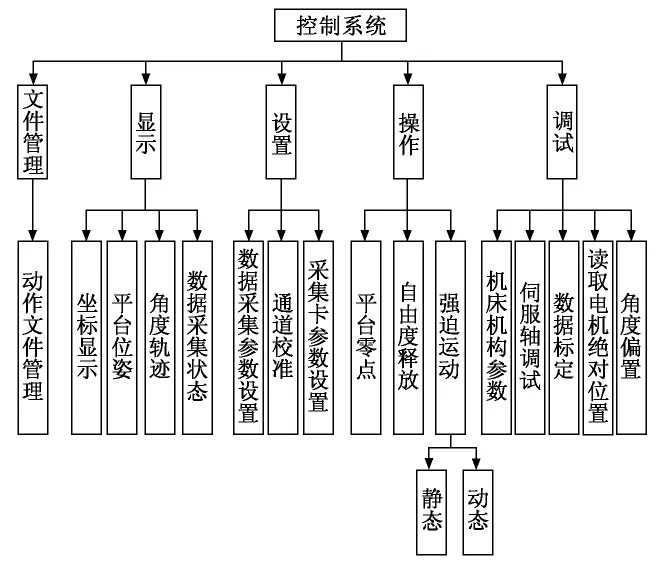
圖1 運動平臺控制系統的總體結構
動作類包含動作名稱、動作類型等參數,具有完成獲取動作信息、起始角度設置、角度文件輸出等功能。機構計算類包含機構坐標、長度、角度等參數,能夠完成機構的正解和反解等計算。控制類包含控制接口等信息,完成檢查控制器是否連接、連接控制器、斷開與控制器連接、下載文件到控制器等功能。
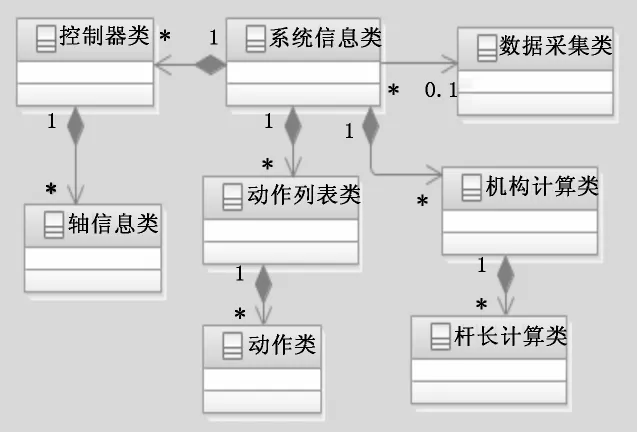
圖2 各類設計之間的關系
4 電子凸輪
ACR9000是Par ker最先進的獨立式運動控制器,可控制1軸~8軸。便利的接口型式和高效的通信能力使ACR9000具有很高的靈活性,可用在不同的高速高精度的自動化設備上。ACR9000裝有強大的運動功能,包括分段電子凸輪、先進的實時相電子齒輪裝置和高達8軸的線性插補等。
本控制軟件的控制對象為6軸聯動,這里設定虛擬軸為主軸,6個軸為從軸。在控制器里設定一個毫秒定時器,并將該定時器作為主軸。電子凸輪曲線可以采用多種描述方式,常用兩維表格分別描述主軸和從軸的值,也可以采用數學公式來描述,這里采用查詢電子凸輪表的方式實現。根據運動函數,將運動軌跡離散化,并計算在每一個離散點處各軸電機要運動的距離,將這些數據生成電子凸輪表,使從軸跟隨主軸運動[6]。電子凸輪控制流程圖如圖3所示。
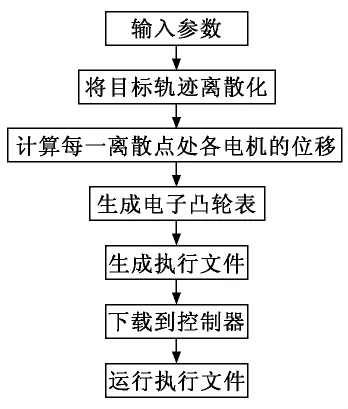
圖3 電子凸輪控制流程圖
5 數據采集
由于對數據采集卡和編碼器數據的讀取需要在時間上對應,因此這里采用軟件觸發方式。同時,每次采集的數據較多,包括許多絕對值編碼器數據,而編碼器數據通過串口讀取,花費時間較多,對定時精度影響較大。由于計算機從內存中讀取數據比從設備端讀取數據的速度要快,因此對于絕對值編碼器數據,在應用程序的主框架程序中通過接口函數利用控制器本身的高精度定時器定時,每毫秒讀取一次并存放在計算機內存中。然后利用Windows自帶的多媒體定時器timeset Event( )函數來設定以1 ms為周期進行數據采集。對于采集卡數據則可直接讀取。
由于對3個絕對值編碼器讀取的數據是對應的桿長,并不是想要的模型角度,因此需要進行相應的計算。但是,由于需要采集的數據較多,且采集周期較短,如果每采集完一次就計算一次,對采集周期影響較大。因此,本系統采用的方法是:先采集數據,等全部數據采集完后,在數據輸出的時候再進行計算。
6 測試
本系統測試環境由工控機、控制器、驅動器、電機等組成,其中絕對值編碼器的數據通過RS-485線由計算機讀取。控制系統框圖見圖4。
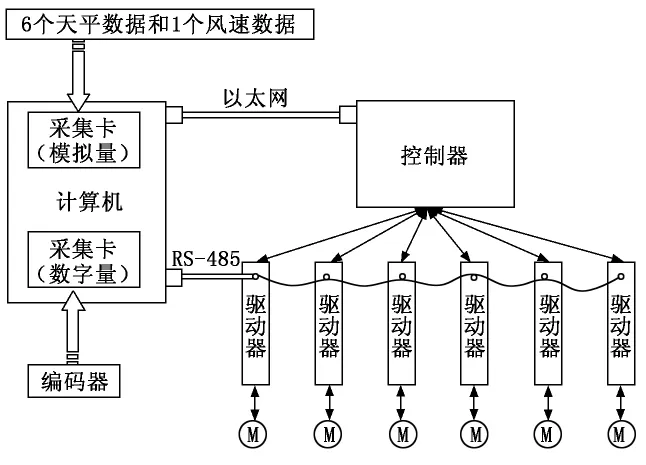
圖4 控制系統框圖
系統的測試包括單軸調試、多軸聯動調試、數據采集調試3個部分。單軸測試的目的主要是對單根軸的速度、位置和跟隨誤差進行測試。多軸聯動測試由用戶設定運動角度,經計算機計算后控制電機運動,對各電機位置和平臺位置進行測量,若符合理論值則測試通過。數據采集調試分為對數據采集卡讀取的調試和對編碼器直接讀取的調試。對于模擬量采集卡的調試方法是:給定標準電壓,經過放大器后,分別用本軟件和示波器對信號進行采集,若兩組數據一致則測試通過。對于經過RS-485讀取的絕對編碼器數據進行測試,若其跟測量的電機實際位移一致則測試通過。
7 結束語
通過對系統的實際聯調測試[7],該模擬運動平臺控制軟件能夠很好地實現各部分功能,同時具有較強的實時性。由于采用了電子凸輪控制模式,可以實現各種復雜曲線運動,并且具有較好的動態特性。
[1]賀德馨.風洞天平[M].北京:國防工業出版社,2001.
[2]鄧福偉,劉振興,周恒.多通道數據采集系統的設計[J].微計算機信息,2008(9):148-150.
[3]梁志遠.多通道數據采集系統軟件設計[J].核電子學與探測技術,2010,30(3):426-428.
[4]Li S,Luo J R,Wu Y C,et al.Continuous and real-ti me data acquisition embedded system for EAST [J].IEEE Transactions on Nuclear Science,2010,57(2):696-699.
[5]徐宏偉,王龍英,郝發義.電子凸輪在印刷機中應用的前景展望[J].印刷雜志,2005(11):70-72.
[6]趙越錦.基于臺達運動控制型PLC電子凸輪功能的高速繞線機[J].伺服控制,2008(10):63-66.
[7]寧金星,盧京潮,閆建國.基于VC++的無人機飛控地面站軟件的開發[J].計算機測量與控制,2009,17(3):596.
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
石油化工建設(2018年1期)2018-07-10 09:49:50
制造技術與機床(2017年6期)2018-01-19 02:41:21
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
石油化工建設(2015年5期)2015-12-01 04:17:19
電子設計工程(2015年3期)2015-02-27 12:04:00