優(yōu)化GA的模糊自適應(yīng)張力控制
2013-11-02 06:34:30靳文軍劉伯鴻徐志奇劉麗媛
自動化儀表 2013年7期
靳文軍 劉伯鴻 徐志奇, 劉麗媛
(蘭州交通大學(xué)自動化與電氣工程學(xué)院1,甘肅 蘭州 730070;中國石化集團(tuán)第五建設(shè)公司2,甘肅 蘭州 730060)
0 引言
目前,高速、高精度是現(xiàn)代卷繞設(shè)備的發(fā)展方向,鍍膜、纖維纏繞、印刷等生產(chǎn)設(shè)備的重要技術(shù)是張力控制[1]。傳統(tǒng)PID控制器具有結(jié)構(gòu)簡單、運(yùn)行穩(wěn)定和動態(tài)特性好等特點(diǎn),故在工業(yè)控制中占據(jù)主要位置。但真空卷繞系統(tǒng)中的張力控制是一個(gè)非線性、強(qiáng)耦合、時(shí)變的復(fù)雜系統(tǒng),傳統(tǒng)PID控制器很難確保張力的穩(wěn)定。張力如果處于動態(tài)變化過程,鍍膜很難達(dá)到預(yù)想的結(jié)果,甚至?xí)l(fā)生薄膜斷裂等現(xiàn)象[2]。
本文針對卷繞張力控制的特點(diǎn),將模糊自適應(yīng)PID控制與遺傳算法相結(jié)合,設(shè)計(jì)了基于遺傳算法的模糊自適應(yīng)PID控制器。該控制器由離線和在線兩部分組成。該控制器利用遺傳算法搜索出一組最優(yōu)的PID參數(shù)作為在線調(diào)節(jié)的初始值,在線部分主要用來實(shí)時(shí)調(diào)整系統(tǒng)瞬態(tài)響應(yīng)的PID參數(shù),以確保系統(tǒng)的響應(yīng)具有最優(yōu)的動態(tài)和穩(wěn)態(tài)性能,并通過一個(gè)模糊推理系統(tǒng)來實(shí)現(xiàn)PID參數(shù)在線調(diào)整[3]。仿真結(jié)果表明,遺傳算法(genetic algorithm,GA)優(yōu)化的模糊自適應(yīng)張力控制具有穩(wěn)定性能好、上升時(shí)間快、精度高等性能指標(biāo),比傳統(tǒng)PID控制性能優(yōu)良,適合無法準(zhǔn)確建立數(shù)學(xué)模型的被控對象。
1 控制原理
1.1 常規(guī)增量式PID
PID控制器在連續(xù)情況下的表達(dá)式為:

式中:誤差e(t)=yr(t)-y(t)為輸入yr(t)與輸出y(t)之差;kp、ki、kd分別為比例、積分、微分系數(shù)。
差值式PID控制器的表達(dá)式為:

首先根據(jù)被控對象來確定PID的3個(gè)參數(shù),然后將偏差e作為初始輸入量,得到控制量,從而滿足不同參數(shù)的不同要求,直到被控對象穩(wěn)定性能達(dá)到要求為止。
1.2 自適應(yīng)模糊PID控制器原理
自適應(yīng)模糊控制器首先采用偏差e和偏差變化率ec來采集被控對象的完整信息,并將這些信息作為作初始輸入量;通過模糊化得到模糊偏差量E和模糊偏差變化率 EC[4-6];再經(jīng)過模糊推理及清晰化,輸出ΔKP、ΔKi、ΔKd,作為 PID 的3個(gè)調(diào)整參數(shù),用于在線修正PID的參數(shù),以滿足不同參數(shù)的不同要求,達(dá)到運(yùn)行參數(shù)自整定的目的。
基于GA的自適應(yīng)模糊PID控制器結(jié)構(gòu)圖如圖1所示。
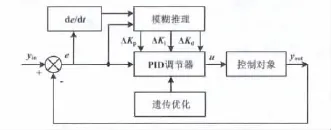
圖1 控制器結(jié)構(gòu)圖Fig.1 Structure of the controller
圖1中,實(shí)時(shí)模糊 PID 控制中的 Kp、Ki、Kd調(diào)整算法如下:
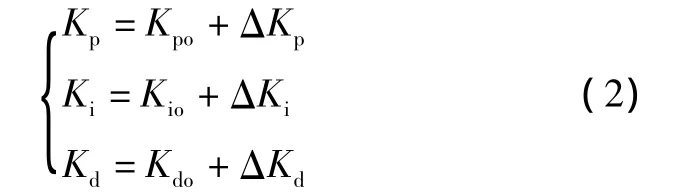
式中:Kpo、Kio、Kdo為PID 參數(shù)的初始值,一般通過經(jīng)驗(yàn)公式確定[3]。
本文將使用遺傳算法離線優(yōu)化初始參數(shù)。
1.3 遺傳算法離線優(yōu)化初始參數(shù)
遺傳算法能夠模擬自然界中生物進(jìn)化的發(fā)展規(guī)律,對特定目標(biāo)實(shí)現(xiàn)自動優(yōu)化[8]。基于遺傳算法的PID參數(shù)整定的過程如下。
①對參數(shù)Kpo、Kio、Kdo進(jìn)行編碼。在試驗(yàn)過程中,將各參數(shù)用10位二進(jìn)制碼表征,使得其對應(yīng)基因長度為30。
②N個(gè)個(gè)體構(gòu)成的初始種群隨機(jī)產(chǎn)生。
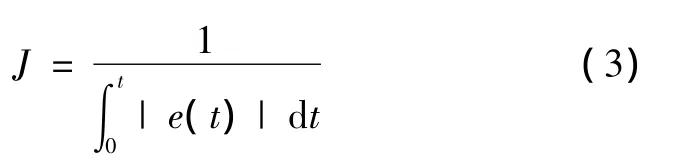
③把初始種群中每個(gè)個(gè)體譯碼成對應(yīng)的參數(shù)值,用以求取適應(yīng)度函數(shù)。為優(yōu)化PID參數(shù),本文選取絕對誤差矩陣的積分作為評價(jià)的性能指標(biāo),此時(shí)的適應(yīng)度函數(shù)為:
④利用復(fù)制、交叉和變異算子對種群進(jìn)行操作,產(chǎn)生下一代種群;采用適應(yīng)度比例選擇法對個(gè)體進(jìn)行選擇,選擇公式如下。

式中:fl為第L個(gè)個(gè)體的適應(yīng)度;m為種群大小;psl為第L個(gè)個(gè)體被選擇的概率。
⑤若滿足步驟③,終止尋找,最佳參數(shù)已被確定;否則執(zhí)行步驟④,重新開始操作,直到滿足終止條件為止。
2 模糊自適應(yīng)PID控制器
根據(jù)對張力控制原理的分析和以往的試驗(yàn)可知,當(dāng)卷繞速度達(dá)到一定值后,張力的波動是相當(dāng)大的[7]。由于曲率的變化和速度的變化都會使得張力改變,故采用薄膜張力偏差和偏差變化率作為控制器的輸入,從而完成PID參數(shù)的在線整定。
2.1 模糊推理器的設(shè)計(jì)原則
將薄膜張力模糊化偏差E和偏差變化率EC作為輸入,根據(jù)輸入大小進(jìn)行模糊推理,實(shí)現(xiàn)對參數(shù)的在線調(diào)整。
根據(jù)現(xiàn)場實(shí)際情況及操作人員經(jīng)驗(yàn),一般情況下的整定原則如下。
2.2 模糊規(guī)則的建立
語言規(guī)則模塊是模糊控制器的核心部分,它是一個(gè)規(guī)則庫。當(dāng)PID控制器的算法和結(jié)構(gòu)確定后,控制的精準(zhǔn)主要取決于其參數(shù)的設(shè)置。考慮到在任意時(shí)刻PID控制器的3個(gè)輸入?yún)?shù)相互作用關(guān)系對輸出結(jié)果有決定性的影響,故根據(jù)現(xiàn)場操作人員與專家的現(xiàn)場運(yùn)行維護(hù)經(jīng)驗(yàn),建立適當(dāng)?shù)哪:刂埔?guī)則表。通過直接查表,實(shí)現(xiàn)對PID參數(shù)的在線整定,達(dá)到快速、高效控制的目的。
模糊的偏差量E語言值集合選定為:{PB(正大),PM(正中),PS(正小),PO(正零),NO(負(fù)零),NS(負(fù)小),NM(負(fù)中),NB(負(fù)大)};模糊的偏差變化率EC的語言值集合選定為:{PB(正大),PM(正中),PS(正小),PO(正零),NS(負(fù)小),NM(負(fù)中),NB(負(fù)大)};在線直接查表,就可以對 PID參數(shù)進(jìn)行整定,從而達(dá)到快速響應(yīng)的目的。
采用PID控制的ΔKP、ΔKi和ΔKd這3個(gè)參數(shù)的模糊控制規(guī)則如表1~表3所示。
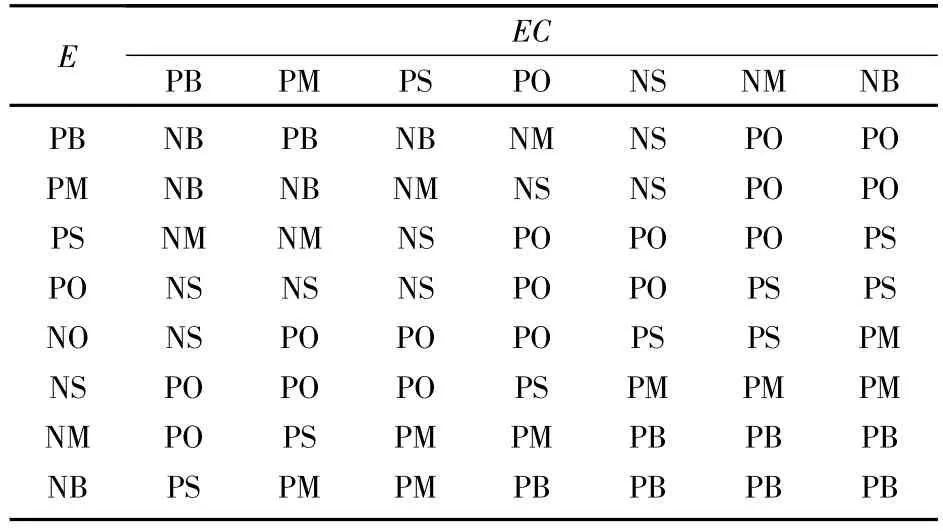
表1 ΔKp模糊控制規(guī)則表Tab.1 Rules of ΔKpfuzzy control
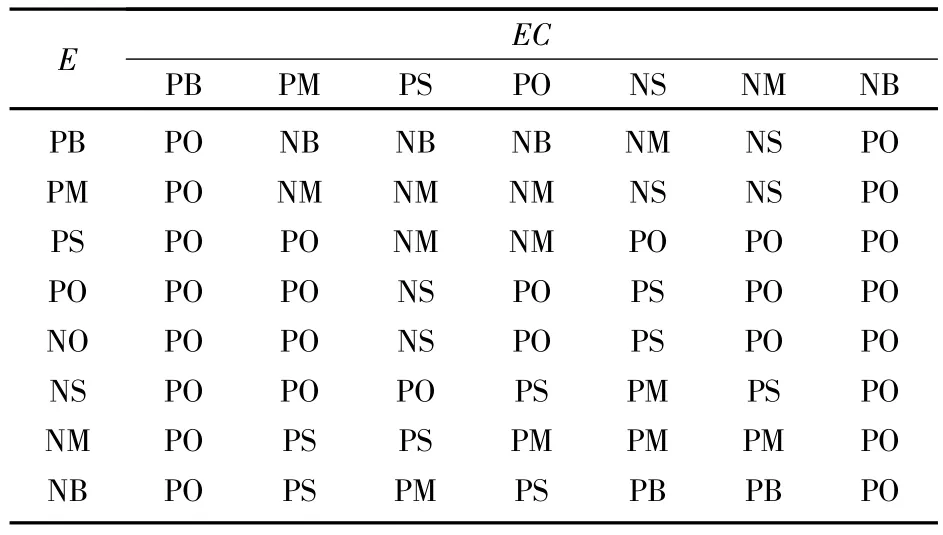
表2 ΔKi模糊控制規(guī)則表Tab.1 Rules of ΔKifuzzy control
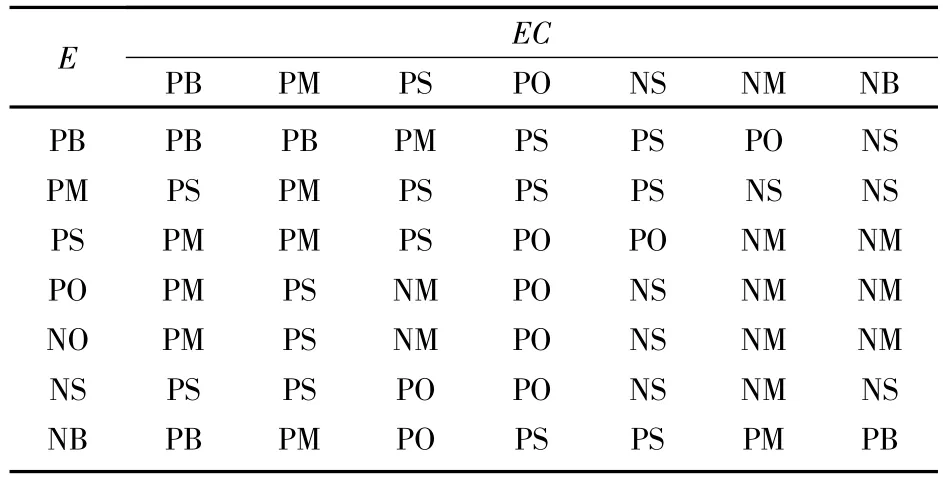
表3 ΔKd模糊控制規(guī)則表Tab.3 Rules of ΔKdfuzzy control
2.3 模糊判決
把模糊量轉(zhuǎn)換為清晰量的過程稱為清晰化。為了得出精確的控制量,就要求模糊推理能正確地計(jì)算出結(jié)果。本文采用工業(yè)中廣泛使用的加權(quán)平均法。設(shè)定輸出模糊集合為U=∑uU(xi)/xi,可按下式計(jì)算輸出清晰量。
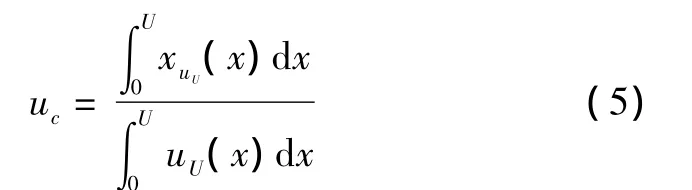
經(jīng)過模糊化可以求得 ΔKp、ΔKi、ΔKd。
3 仿真試驗(yàn)
仿真試驗(yàn)是通過Matlab下的工具箱Simulink實(shí)現(xiàn)的。在忽略電參數(shù)、保留機(jī)械參數(shù)的條件下,選取被控對象的傳遞函數(shù)為:

在離線部分,遺傳算法中的群體大小為30,交叉概率為0.8,變異概率為0.25,最大迭代數(shù)為150。試驗(yàn)中,系統(tǒng)在第75代時(shí)趨于穩(wěn)定,得到PID參數(shù)的初始值為:Kpo=0.32、Kio=0.1、Kdo=0.85。在 Simulink中設(shè)置采樣時(shí)間為1 ms,利用模糊自適應(yīng)PID對階躍信號響應(yīng),在第400個(gè)采樣時(shí)間時(shí)控制器輸出加1.0的干擾,試驗(yàn)結(jié)果圖2所示。
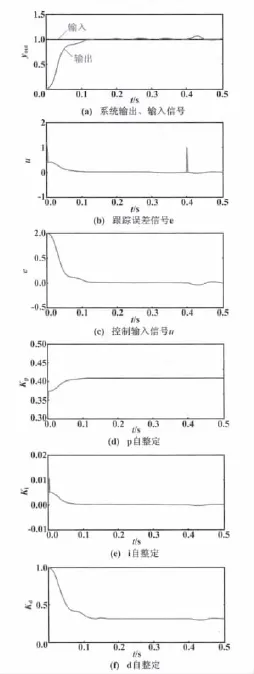
圖2 仿真結(jié)果Fig.2 Simulation results
由圖2可以看出,基于GA的模糊自整定PID控制器可以很好地跟蹤參考輸入信號的變化[8-10],即使控制輸入信號u突變時(shí)(非線性狀態(tài)下),也可以很好地完成對突加干擾信號的控制,即可實(shí)現(xiàn)對非線性系統(tǒng)的良好控制。
在現(xiàn)實(shí)情況下,上述PID控制方法達(dá)不到理想的控制要求,因此需要對上述方法做以下修正及改進(jìn)。
①增加平滑濾波器。在實(shí)際的控制器參數(shù)整定過程中難免出現(xiàn)振蕩,采用平滑濾波器就實(shí)現(xiàn)了參數(shù)的平滑改變。
②構(gòu)造誤差性能的判定標(biāo)準(zhǔn)。控制器在任何情況下都在計(jì)算更新,使系統(tǒng)的實(shí)際輸出值接近于系統(tǒng)給定值,這不但增加了計(jì)算負(fù)擔(dān),而且增大了噪聲影響的機(jī)率。當(dāng)誤差性能判定標(biāo)準(zhǔn)建立后,可以有效地解決這個(gè)問題。
4 結(jié)束語
在現(xiàn)代工業(yè)控制過程中,優(yōu)化PID控制參數(shù)已成為人們備受關(guān)注的研究對象,結(jié)合先進(jìn)的遺傳算法、模糊控制策略及PID控制器的良好性能,使得基于GA的模糊PID控制具有快速檢測、運(yùn)算量小、響應(yīng)速度快、超調(diào)量小、穩(wěn)態(tài)性能好等特點(diǎn),從而滿足了卷繞機(jī)的張力控制的要求。因此,基于GA的模糊自適應(yīng)PID控制策略在卷繞機(jī)的張力控制過程中有著良好的應(yīng)用及發(fā)展前景。
[1] 李軍宏,閻建國,張洪才,等.箭桿織機(jī)經(jīng)張力控制方法的研究[J].自動化儀表,2002,23(11):14 -17.
[2] 李迪.卷繞系統(tǒng)中的張力控制研究[D].西安:西安科技大學(xué),2007.
[3] 徐志奇,劉麗媛,李金霞.基于模糊PID復(fù)合控制在交流伺服電機(jī)系統(tǒng)中的仿真研究[J].控制工程,2012,19(2):73 -76.
[4] 高澤東,李建軍,高教波,等.模糊自整定PID算法在伺服控制中的應(yīng)用研究[J].自動化儀表,2011,32(10):55 -59.
[5] 聞新.MATLAB模糊邏輯工具箱的分析與應(yīng)用[M].北京:科學(xué)出版社,2001.
[6] 張涇周,楊偉靜,張安祥.模糊自適應(yīng)PID控制的研究及應(yīng)用仿真[J].計(jì)算機(jī)仿真,2009,26(9):132 -135,163.
[7] 李實(shí)永,王欽若.模糊控制在薄膜張力控制系統(tǒng)中的研究與應(yīng)用[J].電氣傳動自動化,2001,23(5):33 -35.
[8] 牛薌潔,王玉潔,唐劍.基于遺傳算法的PID控制器參數(shù)優(yōu)化研究[J].計(jì)算機(jī)仿真,2010,27(11):180 -182.
[9] Ziegler J G,Nichols N B.Optimum setting for automatic controllers[J].ASME Transactions,1942:759 -768.
[10] 郭官周,湯霞清,郭英,等.基于模糊控制器的爐溫控制算法仿真與應(yīng)用[J].自動化儀表,2011,32(5):42-45.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
Coco薇(2017年11期)2018-01-03 20:59:57