二維激光掃描演示實驗系統設計
2013-11-05 06:43:18吳成羅云
電子測試 2013年5期
吳成 羅云
(湖北工程學院物理與電子信息工程學院,孝感湖北 432000)
隨著激光技術的大力發展,激光掃描技術已經廣泛地應用到激光打標、條碼掃描、激光雕刻、激光加工等領域,然而這些領域的應用均需要相應的掃描系統作為硬件支撐。相比于其它激光掃描器,激光振鏡掃描式系統因具有高精度、高速度等特點而廣泛用于激光加工行業。基于上述分析,考慮實驗室現狀,采用擴束鏡、聚焦鏡、物鏡、XY掃描反射鏡及其驅動部件和下位機控制器等硬件設計了二維激光掃描演示實驗系統,并設計了上位機用戶界面,進行了相關的測試實驗。
1 二維激光掃描演示實驗系統硬件設計
二維激光掃描演示實驗系統如圖1所示,整個系統由激光器、擴束鏡、聚焦鏡、物鏡、XY軸掃描反射鏡及其驅動部件、下位機控制器和PC機上控制界面組成。激光器發射的激光束經過擴束鏡之后,得到均勻的平行光束,然后通過聚焦系統的聚焦以及物鏡組的光學放大后依次投射到X軸和Y軸振鏡上,最后經過兩個振鏡,二次反射到工作臺面上,形成掃描平面上的掃描點。
在工作中,用戶可根據自身需要在嵌入式控制界面中輸入文字或者一定形狀的圖形,控制界面根本實際需要將輸入轉換為下位機控制器所能識別并能執行的運動直線段,并通過異步串口發送至下位機控制器。下位機控制器可以通過驅動器控制XY軸步進電機,同時也能控制器激光器的開啟和關閉,以實現跳點或對刀時激光器的控制。
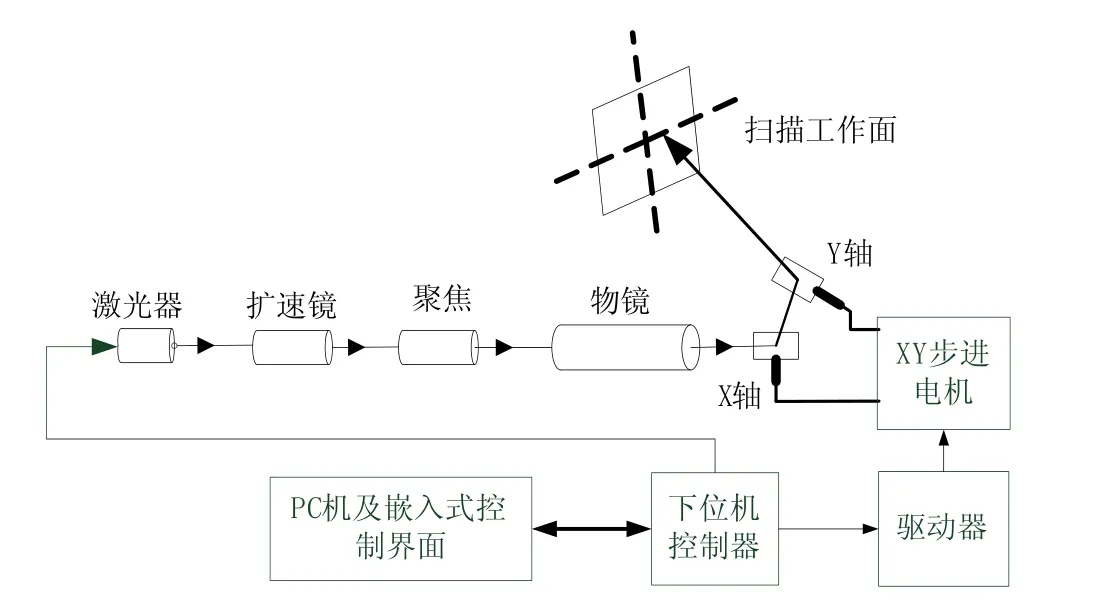
圖1 二維激光掃描演示實驗系統示意圖
1.1 激光擴束方法選擇
由于激光束具有一定發散角,為了得到合適的聚焦光斑以及掃描一定大小的工作面,通常在選擇合適的透鏡焦距的同時,需要將激光束進行擴束。此外,激光經過擴束后,激光光斑被擴大,從而減少了激光束傳輸過程中的光學器件表面激光束的功率密度,減小了激光束通過時光學組件的熱應力,有利于保護光路上的光學組件。擴束后的激光束其發散角被壓縮,減小了激光的衍射,從而能夠獲得較小的聚焦光斑。
考慮到實際因素,本系統采用開普勒法擴束法[8],其原理如圖2所示,它由一個負透鏡和一個正透鏡組成,先經前面的負透鏡聚焦后,再經一個正透鏡準直為平行光。負透鏡又對正透鏡的像差進行補償,它們具有相同的虛焦點

圖2 開普勒擴束法
1.2 系統精度分析
設計中要求掃描視場的范圍達到210mm×350mm,采用XY振鏡掃描系統,設X振鏡和Y振鏡之間的距離 30emm= ,工作距離 525dmm= 。系統要求控制誤差≤±0.01mm,則取系統最小精度為0.002mm。
如果電機選用一般的步進電機,其步距角為0.9°,細分驅動采用512最大細分,而傳動比選用180:1,則步進電機最小步距為 :(0.9 × 2π)/360/180/512 = 0.17urad
可見0.17urad<< 3 .6036urad,因此,僅僅選用普通步進電機即可滿足系統精度要求。
1.3 步進電機及其驅動器接口
通過上述分析,系統選用一般的兩相混合式步進電機作為執行電機,同時選用DMD402A作為電機驅動器,步進電機、驅動器及控制器間的接口示意圖如圖3所示,驅動器的輸入信號為:公共端、脈沖信號、方向信號和脫機信號。采用共陽極接線方式,控制信號低電平有效,當輸入脈沖的下降沿到來時,驅動電機運行一步(為確保電機的可靠響應,脈沖低電平持續時間應不小于10μs);方向信號端子接收控制器輸出的高/低電平信號,分別代表電機的兩個旋轉轉向;脫機信號端子接收控制機輸出的高/低電平信號,低電平時電機相電流被切斷,轉子處于脫機狀態(自由狀態),高電平或懸空時,轉子處于鎖定狀態。驅動器的輸出信號為四個電機驅動信號A+、A-、B+、B-,用來驅動兩相混合式步進電機,將這個四路信號分別連接到步進電機相應的輸入端即可。
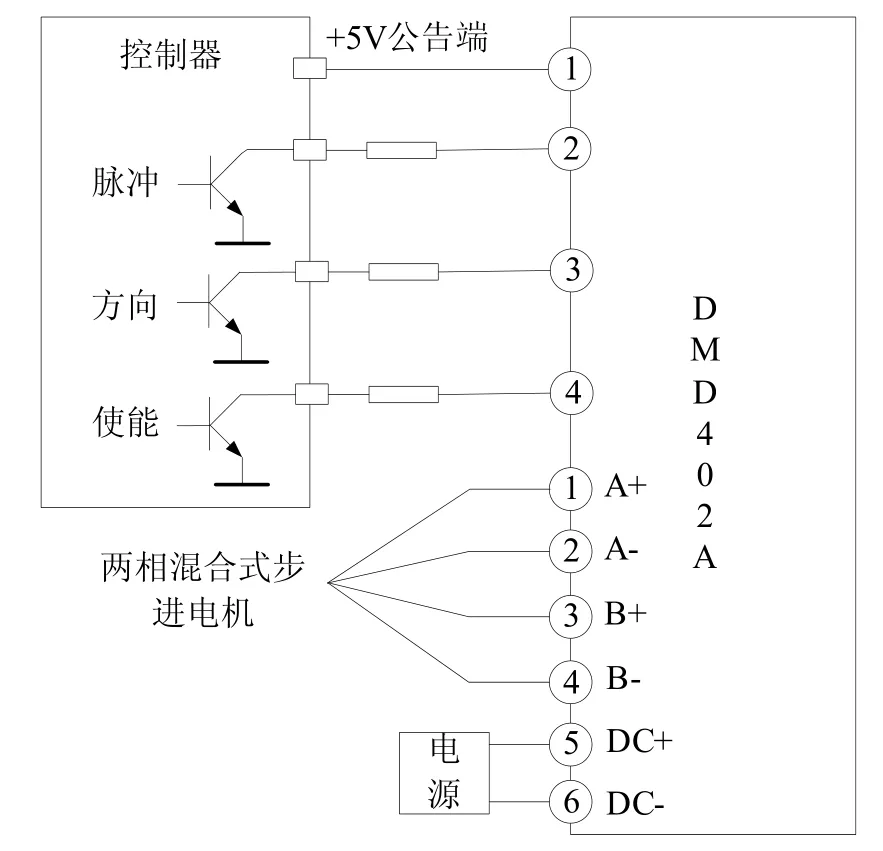
圖3 步進電機、驅動器及控制器間的接口示意圖
2 系統軟件設計
2.1 系統執行線段的插補實現
二維振鏡激光掃描系統使用伺服電機控制X軸與y軸振鏡的運動,輸入數據寬度均為16位。也就是說,對于掃描平面上的X軸與Y軸坐標,分辨率為1/65536。三維振鏡激光掃描系統掃描場最大為210mm x 350mm(掃描場高度為525mm時),因此可以對整個掃描場進行坐標化。
對于X軸,210/65536=3.21um,
對于Y軸,350/65536=5.34um
對掃描場進行坐標化,設掃描精度為0.1um(完全可以滿足XY所需的插補精度),即X軸或Y軸振鏡轉動的最小偏角為0.1um×10E-3/525mm=0.19urad,普通步進電機也可以滿足該精度要求。
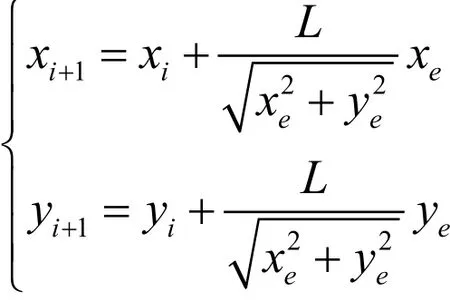
插補算法中最為常用的為直線插補,如圖9所示,設插補從O點開始,插補終點,單個插補周期插補距離為ΔL,在X軸的位移為ΔX,在Y軸的位移為ΔY,則可得
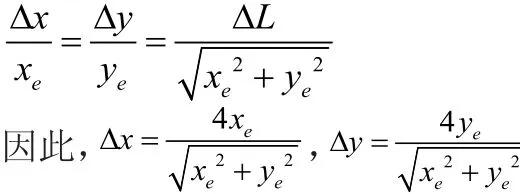
因此,第i+1點的插補公式為:
圓弧插補是多個直線段插補,原理類似。
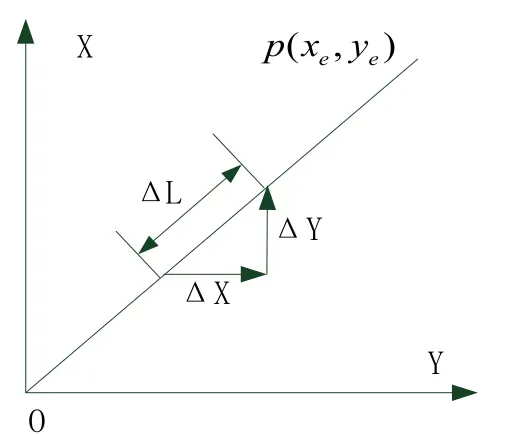
圖4 直線插補算法
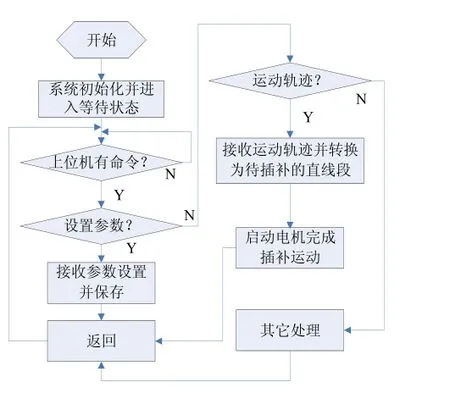
圖5 下位機控制器程序流程圖
2.2 下位機控制器程序流程
下位機控制器程序流程如圖5所示,首先系統上電初始化,之后下位機控制器進入命令等待狀態,等待上位機PC用戶界面的相關命令。如果有命令即刻進行判斷,如果是參數設置,則接收設置參數;如果是運動軌跡,則將軌跡轉換為可插補的線段,之后啟動電機完成插補運動;如果是其它事項,則進入相應的處理程序。之后返回至等待狀態,等待上位機下一次命令。
3 實驗及結論
PC上位機軟件采用Java語言設計,并對設計的二維激分別進行光掃描系統進行聯合測試,分別進行直線段繪制、螺旋矩形掃描。最后進行了普通漢字的掃描測試,分別在用戶界面在輸入“湖北工程學院”,在下位機的控制下,激光筆依次在繪制板上繪下相應的文字。較好的完成了控制功能。
以下位機控制器、普通步進電機及其驅動、準直鏡、擴束鏡和聚焦鏡設計并制作了二維激光掃描演示實驗系統,經過反復測試,系統工作較為穩定,達到了設計要求。
[1] 彭雪峰. 二維振鏡式掃描系統及其在SLS中的應用[D].武漢:華中科技大學, 2005
[2] 胡浩. 振鏡掃描式激光焊接系統的研究[D]. 武漢:華中科技大學, 2011
[3] 文世峰. 選擇性激光燒結快速成形中振鏡掃描與控制系統的研究[D]. 武漢:華中科技大學, 2010
[4] 汪會清, 史玉升, 黃樹槐. 三維振鏡激光掃描系統的控制算法及其應用[J].華中科技大學學報, 2003,31(5):70-71
[5] 李小林, 朱力群, 黃因慧.快速成形中的振鏡掃描系統.電加工, 1998, 3:36-37
[6] 王瑞敏, 盧秉恒. 用于激光掃描的幾種動態聚焦系統分析[J].應用激光, 1998, 18(1):10-12
[7] 師文慶. 振鏡掃描式激光點焊技術中掃描路徑的優化[J].應用激光, 2008, 28(4):332-335
[8] 李建新. 激光準直擴束設計和仿真[J].裝備制造技術,2009, 3:28-30
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
