激光槍自動射擊報靶裝置
2013-11-05 06:43:18陳啟昂潘瑤麟樓奇力
電子測試 2013年5期
陳啟昂 潘瑤麟 樓奇力
(中國計量學(xué)院現(xiàn)代科技學(xué)院 310018)
1 系統(tǒng)方案
1.1 主控芯片的選擇
根據(jù)本題的要求,整個系統(tǒng)中必須要有一個主控芯片來處理數(shù)據(jù)和控制操作,主要考慮以下兩種方案:
方案一:MSP430系列單片機(jī)。16位低功耗單片機(jī),性能良好。
方案二:51系列單片機(jī)。價格便宜,應(yīng)用廣泛,但是有復(fù)雜的算法的局限。
方案三:MK60DX256ZVLQ10單片機(jī)。32位處理器內(nèi)核高性能處理器,具有強(qiáng)大的控制、處理能力,豐富的外圍模塊,穩(wěn)定的系統(tǒng),提供方便高效的開發(fā)環(huán)境。
本系統(tǒng)選取MK60DX256ZVLQ10單片機(jī)作為控制器,MK60DX256ZVLQ10單片機(jī)支持低功耗模式,性能穩(wěn)定,內(nèi)置嵌套向量中斷控制器,在控制、處理數(shù)據(jù)速度上有優(yōu)勢,并含有豐富的外圍模塊,所以選擇方案三。
1.2 傳感器的選擇
本系統(tǒng)的傳感器主要是圖像的采集及分析,可考慮的傳感器如下列方案:
方案一:CCD圖像傳感器。CCD是一種半導(dǎo)體器件,能把光學(xué)影像轉(zhuǎn)化為數(shù)字信號。
方案二:攝像頭。數(shù)字?jǐn)z像頭可以將視頻采集設(shè)備產(chǎn)生的模擬視頻信號轉(zhuǎn)換成數(shù)字信號,進(jìn)而將其儲存在計算機(jī)里。
由于題目明確要求使用攝像頭,識別激光槍投射在胸環(huán)靶上的彈著點光斑,并顯示彈著點的環(huán)數(shù)與方位信息。因此傳感器選擇方案二。
1.3 電機(jī)的選擇
電機(jī)的主要作用是調(diào)整激光筆的位置,指向點光源,可選取的類型如下方案:
方案一:步進(jìn)電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響。每給一次脈沖信號,電機(jī)能夠轉(zhuǎn)過一個步距角。
方案二:直流減速電機(jī)。此電機(jī)在正常通電狀態(tài)下,轉(zhuǎn)速平穩(wěn),角度的變化也近乎連續(xù),控制簡單方便。
方案三:舵機(jī)。此電機(jī)由PWM的占空比來控制轉(zhuǎn)動角度。角度準(zhǔn)確,控制簡單。
根據(jù)設(shè)計的要求可知,步進(jìn)電機(jī)存在的明顯缺陷是角度變化的局限性,控制相對直流減速電機(jī)而言也復(fù)雜。直流減速電機(jī)角度連續(xù)變化,轉(zhuǎn)速平穩(wěn),容易控制,但是舵機(jī)集各個優(yōu)點于一體,因而選用第三種方案。
1.4 總方案的確定
綜上,本系統(tǒng)最終以MK60DX256ZVLQ10作為控制器,根據(jù)攝像頭采集的圖像來判斷彈著點所在位置,并顯示于12864液晶屏,同時能通過鍵盤來改變PWM波使舵機(jī)轉(zhuǎn)動相應(yīng)角度,從而調(diào)控激光槍的彈著點。
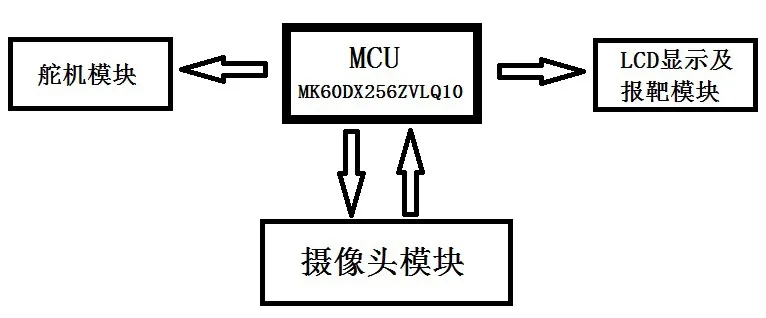
圖1 總方案圖
2 理論分析與計算
2.1 激光槍自動控制原理分析、計算
激光槍的自動控制由兩個舵機(jī)來完成,兩個舵機(jī)分別控制上下移動和左右移動。舵機(jī)的轉(zhuǎn)動角度由PWM波的占空比來控制。
給定PWM波的周期為20ms, 初始化脈寬為1.5ms,即每旋轉(zhuǎn)一度,所需增加的脈寬為:

其中,Tmax為左轉(zhuǎn)極限脈寬。
Tmin 為右轉(zhuǎn)極限脈寬。
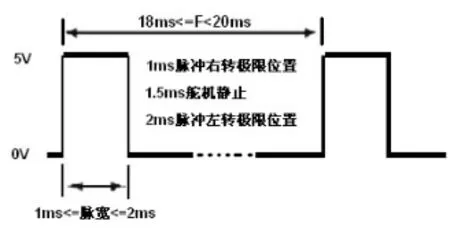
圖2 舵機(jī)控制原理圖
2.2 彈著點檢測原理分析、計算
根據(jù)題目中的要求,胸環(huán)靶是在不反光的白紙畫有一組相距5cm的同心圓(線寬不超過1mm),最內(nèi)圓環(huán)直徑10cm,圓環(huán)內(nèi)為10環(huán)區(qū)域,從最內(nèi)環(huán)至最外環(huán)間分別為9、8、7、6、5環(huán)區(qū)域,最外環(huán)外為脫靶,具體如下:
以圓心為原點,我們采用極坐標(biāo)的方式來處理,因為胸環(huán)靶的位置不改變,通過舵機(jī)轉(zhuǎn)動的角度來改變彈著點在胸環(huán)靶上的坐標(biāo)。所以彈著點的位置可以根據(jù)舵機(jī)轉(zhuǎn)動的角度及舵機(jī)與胸環(huán)靶之間的距離來計算。
根據(jù)以上分析,可以將彈著點的位置問題轉(zhuǎn)化為求解水平角度或仰角與水平角度的相關(guān)問題。降低了任務(wù)的復(fù)雜性,目標(biāo)明確。
根據(jù)對胸環(huán)靶的分析,依據(jù)簡易、精確控制與節(jié)約資源的原則,本設(shè)計采用攝像頭置前,與靶心的垂距為90cm。
激光槍的打靶射擊可分解為水平移動和豎直移動。攝像頭應(yīng)用于確定彈著點的位置,反饋予控制器,在液晶屏上數(shù)字報靶。考慮到能夠快速的檢測到彈著點的具體方位,以便快速瞄靶心。設(shè)激光槍控制彈著點與靶心的距離為x,則
水平方向激光束與中垂線的夾角
計算如下:

其中t為當(dāng)前所給的PWM波脈寬。
豎直方向的布局分析與上述情況相同。
此外,考慮到外界的影響,在胸環(huán)靶的靶環(huán)外貼上正方的黑色膠帶做標(biāo)記。實踐證明,這樣的處理能夠達(dá)到更良好的控制。
3 電路與程序設(shè)計
3.1 電路設(shè)計
本系統(tǒng)的電源模塊有兩種,如圖2所示,上半部分電路是給攝像頭提供5V電壓的電源模塊,下半部分電路是給Kinetis60提供3.3V電壓的電源模塊。
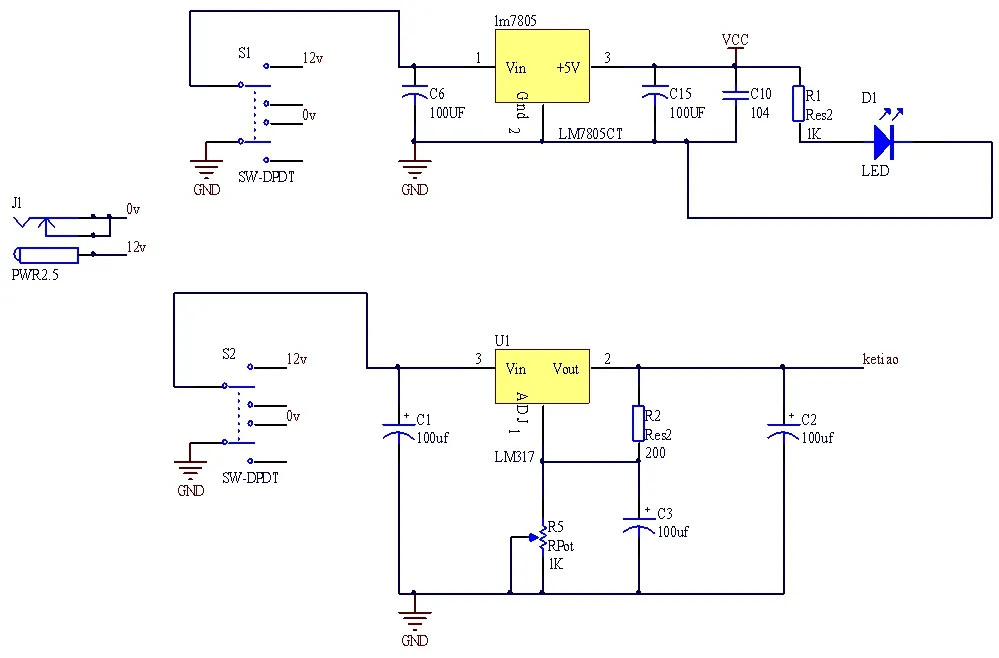
圖4 電源模塊
為了能更清楚地知道激光點當(dāng)前所在環(huán)數(shù),我們加入了語音播報模塊,本模塊由ISD1700芯片及其外圍電路組成,可以對語音進(jìn)行存儲與回放,同時具有音量調(diào)節(jié),聲音擦除等功能。

圖5 語音存儲與回放電路
3.2 程序設(shè)計
程序描述:
初始化部分:控制器配置
程序主體部分包括:激光槍及瞄準(zhǔn)機(jī)構(gòu)、胸環(huán)靶、彈著點檢測電路。
控制系統(tǒng)上電后,進(jìn)入初始化狀態(tài),12864液晶顯示胸環(huán)靶的相應(yīng)圖像,在按鍵之后,系統(tǒng)進(jìn)入按鍵控制彈著點的位置,此時,攝像頭采集圖像,并且液晶顯示數(shù)字報靶。再次按鍵,移動激光筆自動追蹤靶心,經(jīng)過一段后,系統(tǒng)會自動調(diào)節(jié)使得激光筆的彈著點位置與靶心的位置相對并打靶擊中圓心。

圖3 攝像頭與激光槍分布圖

圖6 程序流程圖
4 測試方案與結(jié)果
4.1 測試方法與過程
由理論分析可知,本系統(tǒng)對攝像頭的圖像采集、處理,要求比較高。主要就是如何調(diào)制攝像頭,使其采集到的圖片盡量不發(fā)生畸變。
測試前的準(zhǔn)備:
先給點光源通電,調(diào)整點光源的電流值,達(dá)到規(guī)定范圍內(nèi),然后在給其余設(shè)備供電后系統(tǒng)直接進(jìn)入檢測傳感器是否能夠正常工作狀態(tài)。然后,手動使激光筆打靶,查看攝像頭的圖像采集情況,主要是使水平方向的圖像,豎直方向的圖像盡量少發(fā)生畸變,并且微調(diào)指示臺,傳感器的采樣圖像有顯著地變化,接著按啟動按鍵,就可以測試。
測試方法:在測試前的準(zhǔn)備 工作結(jié)束后,先讓其任意打靶,液晶數(shù)字報靶,鍵盤任意調(diào)整彈著點位置,激光束光斑從胸環(huán)靶上的指定位置迅速瞄準(zhǔn)并擊中靶心。
4.2 測試儀器和材料
穩(wěn)壓電源 數(shù)字萬用表 胸環(huán)靶支架
4.3 測試結(jié)果與數(shù)據(jù)
胸環(huán)靶位置不變,任意給激光筆的指示位置,打靶,液晶數(shù)字報靶,測量數(shù)據(jù)如下表:

表1 胸環(huán)靶位置不變的測量數(shù)據(jù)
激光束光斑從胸環(huán)靶上的指定位置迅速瞄準(zhǔn)并擊中靶心,測量數(shù)據(jù)如下表:

表2 迅速瞄準(zhǔn)并擊中靶心的測量數(shù)據(jù)
任意給環(huán)數(shù),激光筆打到相應(yīng)位置,測量數(shù)據(jù)如下表:
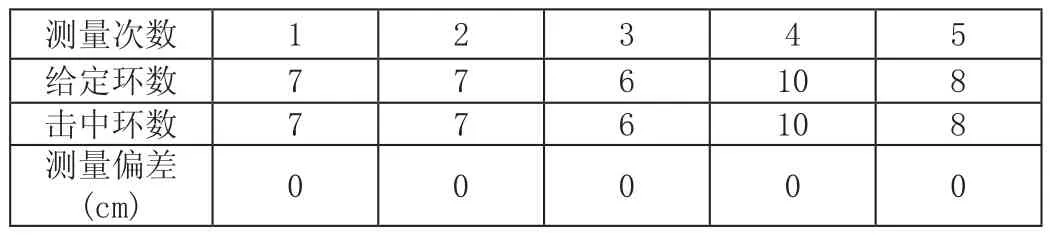
表3 任意給環(huán)數(shù),激光筆打到相應(yīng)位置的測量數(shù)據(jù)
經(jīng)過反復(fù)調(diào)試,胸環(huán)靶位置不變,任意給激光筆的指示位置,打靶,液晶數(shù)字報靶基本準(zhǔn)確,此外,經(jīng)測試,本系統(tǒng)的拓展部分:在15S之內(nèi),激光束光斑從胸環(huán)靶上的指定位置迅速瞄準(zhǔn)并擊中靶心。其他:任意給環(huán)數(shù),激光筆打到相應(yīng)位置,相當(dāng)精確,并且能夠語音報靶。
[1] 劉建,秦會斌,黃博志等.激光打靶系統(tǒng)的設(shè)計[J].傳感技術(shù)學(xué)報,2003年04期
[2] 顧敏芬,梁忠誠,朱云等.基于激光打靶機(jī)的紅外光斑測量[J].光電子技術(shù)與信息,2000年04期
