傳感器技術在過程監控自動控制系統中的應用
2013-11-05 06:42:14左嵐
電子測試 2013年2期
左 嵐
(湖北省咸寧職業技術學院,437100)
1 引言
多傳感器系統實際上構成了一個協同及互補的體系,為了充分發揮整個監測監控信息融合系統的效能,需要按照某些工作準則或算法適當地管理這些傳感器資源。傳感器是信息融合系統中最基本的單元,為了提高信息融合的效果,有必要對作為信息融合系統基礎的傳感器進行必要的管理。系統在對煤礦生產過程進行監測監控時,也會使用到大量的傳感器,這些傳感器就像是監測監控系統的“眼睛”和“耳朵”,如何使“眼睛”和“耳朵”看得更清楚、聽得更明白,將目標對象分辨得更清晰,就需要對傳感器資源進行管理。因此建立一套傳感器自動管理系統可大大提高信息融合系統的效能。為了實現傳感器管理的目的,傳感器管理的首要目標是有效地指導可利用的傳感器資源來收集相關信息,以便有效地完成某項任務。
2 傳感器管理的功能
多傳感器信息融合的基本功能與人類或其他邏輯系統中常見的基本功能類似。不同傳感器的信息分別具有不同的特征:實時的或者非實時的,突變的或者緩變的,模糊的或者確定的,它們可能相互支持或互補,也可能互相矛盾或競爭。多傳感器信息融合就是充分利用多個傳感器資源,通過對這些傳感器及其觀測信息的合理調配,把多個傳感器在空間或時間上的冗余或互補信息依據各種準則來進行綜合,以獲得被測對象的一致性全面解釋或描述。信息融合的基本目標是通過對多個數據的綜合,以獲取更確切、更有價值的信息,這是最佳協同作用的結果。對于任何給定的應用,必須定義傳感器管理各項準則并加以量化,以便詳細說明傳感器的最優分配方案。這些準則通常包括一些可量化的參數,如測量范圍、分辨率、目標檢測概率、狀態估計精度、目標更新速率及識別精度等。傳感器控制管理依賴于人工輸入、信息融合以及外部提示或沒有預計到的請求。進行傳感器管理或傳感器分配的目的,是使上述各項管理內容的目標函數最優。一般來說,一組傳感器很難做到監測所有的目標,或達到系統要求的所有性能指標,需要探索使各種相互矛盾的需求之間達到滿意的方案。
3 傳感器技術在煤礦安全生產過程自動控制系統中的應用
目前的煤礦安全監控系統不能從根本上滿足井下特殊作業環境。例如,采掘面的大型機械設備的移動、主要設備的現場檢修等臨時施工點,不能滿足和適應傳感器節點的快速布防和對安全監控信息的動態檢測與實時傳輸的要求。目前,大多使用的便攜式檢測裝置(如個人數字助理(PDA)),也只能完成小范圍的測量,不能形成大范圍的監控和檢測信息的實時傳輸,致使井下臨時施工點成為煤礦井下安全隱患主要場所之一。
3.1 多傳感器管理
多傳感器管理是指對多個傳感器進行管理。多個傳感器可以是同類傳感器,也可以是異類傳感器。例如在某煤礦主通風機上分別布置了三個傳感器:傳感器1為加速度傳感器,裝在主通風機的軸承座上,經積分后取出振動速度信號;傳感器2和傳感器3為電流互感器,裝在三相交流電機的A相和B相。通過傳感器1來測量軸承的振動狀態,用傳感器2、3來測量電機電流的變化。根據傳感器測量到的時域信號及頻譜發現,傳感器2、3的信號波形比較相似,頻譜接近;傳感器1與傳感器2、3的信號波形及頻譜相差較大。根據Matlab編程計算得到傳感器兩兩之間的冗余度,結果如表1所示。表中,R12表示傳感器1和傳感器2之間的冗余度,R13、R23分別表示傳感器1、3和2、3之間的冗余度。
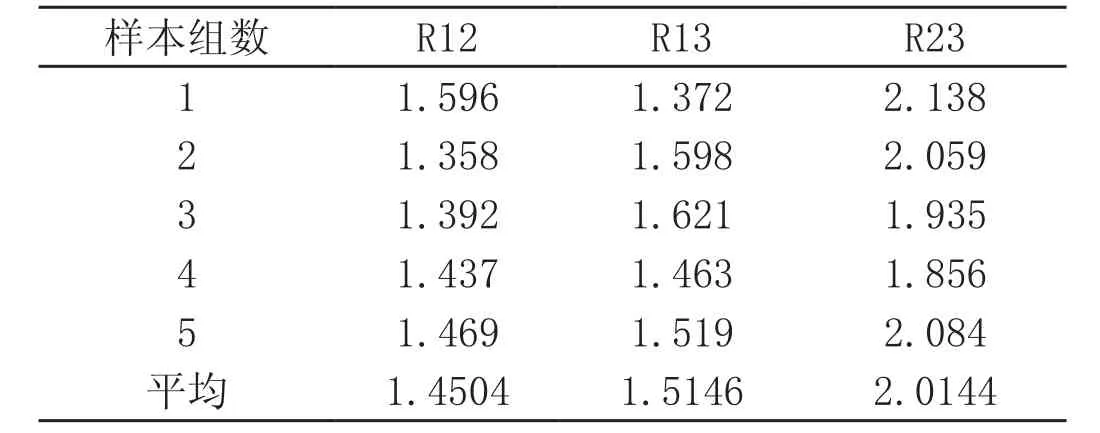
表1 傳感器兩兩之間的冗余度計算值
對三個傳感器進行兩兩比較,如果某兩個傳感器之間的冗余度較大,則說明這兩個傳感器信息的關聯性大。由表1可以看出,傳感器1、2和傳感器1、3之間的冗余度較小,而電流傳感器2、3之間的冗余度較大,關聯性也較大,這也符合實際情況。在實際的故障診斷系統中需要布置多個同類或異類的傳感器,則可計算兩兩傳感器之間的冗余度。再給出一個評價冗余度的閾值,便可判斷各傳感器之間信息的冗余程度。對高度冗余的傳感器從數量上進行剔除,對高度互補的傳感器信息進行融合,這樣可以降低信息融合過程的計算量。這是進行各級信息融合之前的準備工作。
3.2 安全監測系統中傳感器管理設計
3.2.1 傳感器節點的硬件設計
無線傳感器節點的電路結構方框所示。從該電路結構中可以看出,如果打開電池和電源開關,甲烷濃度傳感器和溫度傳感器則分別從井下臨時施工點周圍環境中采集瓦斯濃度和溫度。從這兩種傳感器輸出的數據輸入到信號調理電路,信號調理電路進行預處理,預處理后的數據輸入給單片機,由單片機對數據作模/數轉換、打包等進一步處理后,將數據輸入無線通信模塊,無線通信模塊將數據發送出去,單片機同時由控制的狀態指示燈閃爍一次,無數通信模塊亦可將從信宿節點接收到的數據輸入給單片機。
當打開電源開關后,狀態指示燈亮,按信宿節點上的0號按鍵,從單片機輸出一個開始指令進入輸入無線通信模塊,無線通信模塊將該指令發送出去,等待一段時間后,無線通信模塊將接收到的由無線傳感器節點發送過來的數據輸入單片機,這時狀態指示燈滅,單片機對數據進行處理后送到顯示模塊顯示,同時送到存儲器存儲。當有異常情況發生時,單片機控制報警電路報警。當臨時施工點作業結束后,將USB接口與計算機相連接,這時存儲器將記錄的數據輸入單片機。單片機將數據經USB接口輸入計算機,同時可將計算機中的數據經USB接口輸入單片機中。
3.2.2 傳感器管理中的多目標排序問題
傳感器管理器外部命令,傳感器管理器主要由三個子模塊組成,即方案生成模塊、方案優化模塊和任務規劃模塊。方案生成模塊根據預先設置的方案給當前監測空問的某個特定目標指定一些傳感器或虛擬傳感器對其進行進一步檢測,以提供該目標的確定信息;方案優化模塊按照任務需求優選上述方案,形成最終配對方案;任務管理模塊則負責具體的傳感器任務分配。首先要選取4個監測區域作為目標監測區域,對這4個目標進行排序。影響目標威脅程度的主要因素有:目標的類型、最大突出強度、平均突出強度、突出頻率、事故應急能力等。以上幾個因素對目標威脅程度的影響是不同的,分別求出各因素影響目標威脅程度的權系數:,且
權系數的取值取決于目標威脅程度的輕重。根據相關文獻,目標的類型可由信息融合評價后給出,事故應急能力可由專家給出,其他幾項因素均和目標密切相關,由記錄數據庫給出。以上威脅因素只有目標類型和事故應急能力與其他因素不同,目標類型設有較強瓦斯突出礦井、中等瓦斯突出礦井、較弱瓦斯突出礦井三種級別,其威脅程度的權系數分別為:1。事故應急能力設有易處理、一般和較難處理三種情況,其威脅程度的權系數分別為

多傳感器管理系統的核心是依據一定的最優準則構造目標函數,確定傳感器資源的分配。
4 結論
煤礦井下無線通信實質上是借用巷道的縱向導體作為波導,電波在巷道中傳播呈現導波特性。理論研究和實驗均表明,利用900MHz-3000MHz這一頻段可以實現井下徑向無線通信。井下無線傳感器網絡的物理層設計主要通過理論分析和現場測量的方法,根據井下復雜環境和地質條件對無線傳感器網絡信號傳輸的影響,建立井下無線信號傳播模型;選擇電磁干擾和煤巖壁吸收相對較小的無線頻段及信道編碼方式;實現低成本、低功耗、多功能集成化的傳感器節點設計;滿足煤礦井下高溫、高濕、高塵、高電磁干擾和爆炸性生產環境的工作要求。
[1] 梁濤,侯友夫,吳楠楠.掘進工作面局部通風智能監控系統的研究[J].礦山機械,2008,16(01):112-113.
[2] 關志剛,程千里,王為曉,張會.基于PLC的分布式控制系統在某采煤機電機控制上的應用[J].節能,2011,20(06):176-177.
[3] 陳慶陸,柳增運.便攜式礦用瓦斯檢測系統設計[J].山西電子技術,2011,18(01):210-211.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中華手工(2017年2期)2017-06-06 23:00:31
電子設計工程(2015年15期)2015-02-27 12:07:30
中外會展(2014年4期)2014-11-27 07:46:46
