永磁同步電動機矢量相位滯后的誤差補償控制
2013-11-22 07:51:20唐文明駱光照馬升潘張佳波
微特電機 2013年9期
關鍵詞:分析
唐文明,駱光照,馬升潘,張佳波
(西北工業大學,陜西西安710129)
0 引 言
永磁同步電動機用稀土永磁材料來建立磁場,使得電機體積小、結構緊湊、壽命長、維護方便、運行可靠且具有高效率、高功率密度等優良特性,因此,廣泛應用到各種工業應用場合[1-4]。在永磁同步電動機伺服控制技術中,控制上存在的不可避免的時間延遲影響了永磁同步電動機矢量控制的實時性,造成控制矢量相位滯后。這種控制滯后現象在電機低轉速時影響不大,但是當電機高轉速運行時,會嚴重影響電機控制精度,甚至會造成系統振蕩[5]。文獻[6]對永磁同步電動機驅動系統硬件在環仿真過程中數字控制器與仿真器之間接口的不可避免時間延遲進行了分析,并未對永磁同步電動機矢量控制系統中控制上存在的時間延遲進行分析。為了避免控制滯后帶來的轉速精度不高或高速時電機振蕩的問題,本文提出一種新型補償控制算法,將相關補償量引入到控制系統中,對滯后的空間電壓矢量進行相位補償,實現對電機近乎零滯后的控制,從而改善電機的控制特性。
在本文中,首先分析延遲產生的原因,對其滯后特性進行分析,然后在此基礎上給出具體的補償控制方法。為了驗證補償方法的有效性,最后進行仿真分析與實驗驗證。
1 永磁同步電動機矢量控制滯后特性分析與補償方法
1.1 永磁同步電動機矢量控制系統
永磁同步電動機驅動系統是由DSP 控制器、電源逆變電路、永磁同步電動機(PMSM)以及傳感器等幾個部分組成,其系統結構圖如圖1 所示。DSP控制器采集傳感器信號,其中包括A、B相電流、轉子位置等,經過坐標變換、PI 調節等一系列控制過程后輸出PWM 脈沖信號來驅動電源逆變器,電源逆變器根據數字控制器的PWM 信號將直流電源轉換成永磁同步電動機的三相交流電。
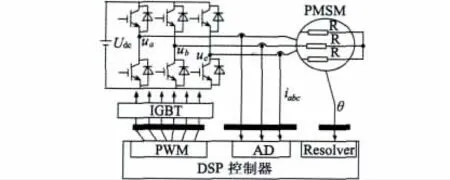
圖1 永磁同步電動機驅動系統結構圖
在永磁同步電動機矢量控制系統中,控制系統輸入參數,如A、B 相電流和電機轉子位置,對于永磁同步電動機矢量控制來說是至關重要的,這些量的精確性及控制上的實時性都直接影響到控制系統的控制效果。
1.2 控制滯后機理分析
在矢量控制過程中,模擬量采集、矢量計算、PWM 輸出時序如圖2 所示。雖然占空比的計算已經完成,但PWM 的裝載是在一個特定的時刻,比如下溢中斷觸發的時刻。這樣,控制滯后是不可避免的。
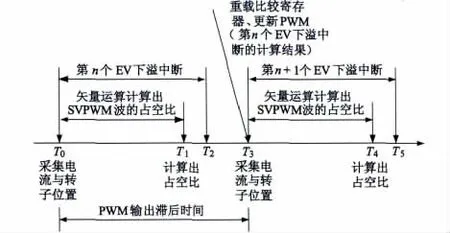
圖2 模擬量采集、矢量計算、PWM 輸出時序圖
根據圖2 的分析,該控制滯后時間:

式中:TD為PWM 輸出滯后時間;T0為電流、轉子位置等參數采樣時刻;T3為下個EV 下溢中斷開始時刻。
1.3 控制滯后誤差分析與補償方法
永磁同步電動機的同步旋轉坐標系參考定子坐標系dqs,以電機的同步轉速旋轉。由圖3 可知,滯后時間TD導致兩相旋轉坐標系產生了一個大小為ωeTD的角度誤差,這樣會導致最終合成的輸出空間電壓矢量相位滯后。
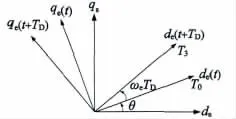
圖3 永磁同步電動機同步旋轉坐標系物理模型圖
在時域中,時間的延遲表示為x(t-TD),轉換到頻域為e-jωTDX(jω)。根據上文的分析,控制器采樣時刻為T0,PWM 作用時刻為T3,控制滯后的時間為T3-T0,即TD。在靜止坐標系下,T0時刻定子電壓矢量:

T3時刻定子電壓矢量:

由式(2)和式(3)可以看出,在永磁同步電動機矢量控制系統中,由于參數的采集、矢量計算、控制信號的作用等過程導致控制滯后,實際輸出的定子電壓矢量與理想的定子電壓矢量之間存在一定的誤差,該誤差:

由式(4)可以看出,實際輸出的定子電壓矢量比理想的定子電壓矢量相位滯后ωeTD。由于PWM載波頻率一定,隨著電機轉速的增加,相位滯后增大。當轉速較高時,相位滯后尤為嚴重,如果不對控制量進行補償,控制滯后會嚴重降低轉速的控制精度,甚至會造成系統振蕩。
為了消除控制滯后帶來的消極影響,本文提出一種相位超前方式的補償方法,對T0時刻的定子電壓矢量us進行相位補償,從而達到近乎零滯后的控制效果。補償方法如下:

式中:θcomp為補償相角。

式中:u*s為補償后的定子電壓矢量。
控制滯后的誤差補償控制系統結構框圖如圖4所示。
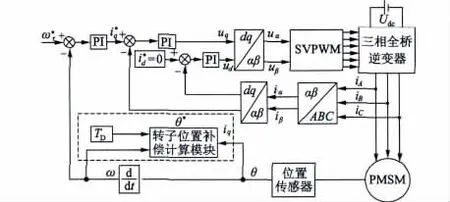
圖4 控制滯后的誤差補償控制系統結構框圖
2 仿真分析
在MATLAB /Simulink 中構建仿真模型如圖5所示,控制系統采用磁場定向的速度、電流雙閉環控制,控制策略則采用id= 0 的矢量控制策略。載波頻率為10 kHz。仿真模型中,永磁同步電動機的參數如下:極對數2;額定功率15 kW;額定轉速12 000 r/min;額定轉矩15 N·m;額定電壓270 V;額定電流63 A;定子繞組電阻0.054 5 Ω;d、q 軸電感0. 227 mH;轉動慣量0.000 7 kg·m2;磁鏈ψ = 0.061 3 V·s。
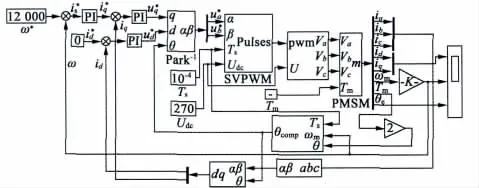
圖5 永磁同步電動機誤差補償控制模型
在經典矢量控制系統基礎上,分別針對不存在控制滯后、存在控制滯后以及在存在控制滯后情況下采用補償控制,進行仿真對比,以驗證理論分析的正確性。其中速度環PI 參數:Kp_S= 15、Ki_S= 0.6;電流環PI參數為:Kp_C= 10、Ki_C= 0.5 ;負載為15 N·m。轉速采用階梯給定的方式,給定轉速分別為1 000 r/min、3 000 r/min、6 000 r/min、9 000 r/min、12 000 r/min。
圖6 為不存在控制滯后(理想情況下)的仿真結果,可以看到在理想情況下,反饋轉速能精確地跟蹤給定轉速。
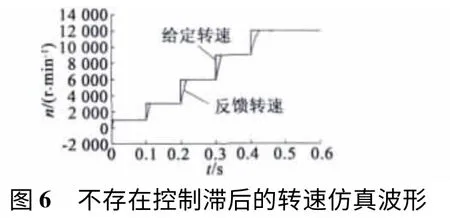
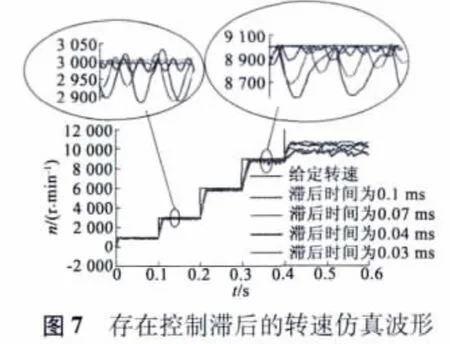
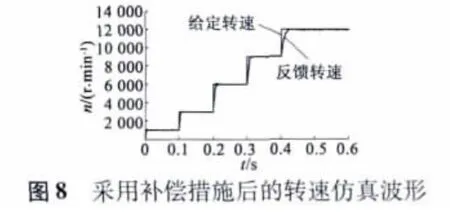
圖7 為控制系統存在控制滯后的轉速仿真波形,圖中曲線是控制滯后時間分別為0.1 ms、0.07 ms、0.04 ms、0.03 ms 的仿真結果。可以看到,當電機運轉于低、中速區間時,反饋轉速能跟蹤上給定轉速,但存在較大的靜態誤差,并且該靜態誤差隨著控制滯后時間的增加而增大。當電機運轉于高速區間時,由于控制滯后的影響,反饋轉速跟不上給定轉速,并且控制滯后時間越長,電機轉速所能達到的最高轉速越低,而且轉速波動越大,甚至出現輕微振蕩。圖8 為加入補償控制后的仿真結果,可以看到,控制效果得到明顯改善,反饋轉速能很好地跟蹤給定轉速,轉速誤差約為± 1%。
3 實驗驗證
本文通過對一臺15 kW、2 對極、額定轉速為12 000 r/min 的永磁同步電動機搭建了矢量控制系統實驗平臺,進行誤差補償控制策略的驗證。以TI公司的DSP-TMS320F2812 為控制核心,配合可編程邏輯器(CPLD)-EPM1270 來實現矢量控制算法;電流傳感器采用串行AD 轉換芯片AD7357,A、B相電流經信號調理電路后進行AD 轉換,然后數據送至CPLD,再由CPLD 傳送至F2812;轉子位置檢測采用高精度旋轉變壓器配合解碼芯片AD2S1210,實時獲取轉子位置信息。本文在母線電壓為270 V,給定轉速為1 000~12 000 r/min 的條件下,對無補償和有補償的情況分別進行實驗。圖9、圖10 分別為無補償的轉速實測曲線和電流實測曲線。圖11、圖12 分別為采用本文提出的補償方法后的轉速實測曲線和電流實測曲線。
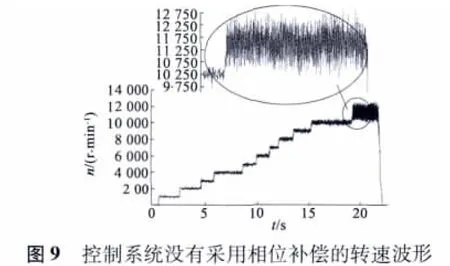
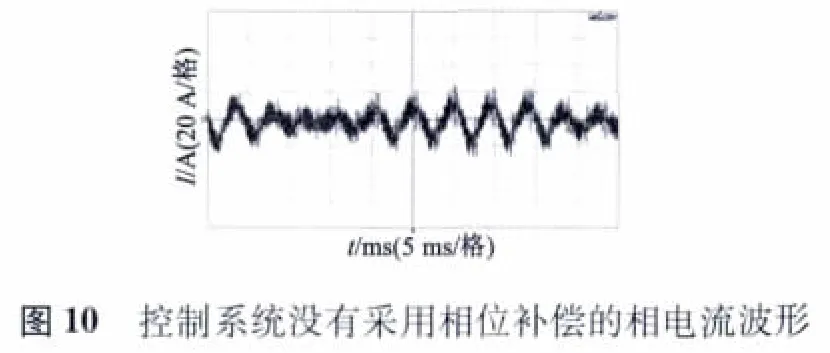
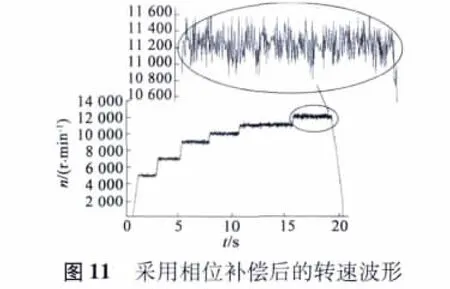
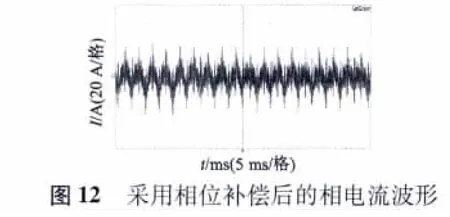
實驗結果表明,不加補償時,反饋轉速能上升到11 000 r/min,但是波動極為劇烈,并出現輕微振蕩。加補償后,反饋轉速能很好地跟蹤給定轉速,當給定轉速為12 000 r/min 時,轉速跟蹤誤差為2.5% 左右。由于仿真控制系統與實際控制系統存在著差異,導致實驗結果與仿真結果不能完全一致,但總體基本相吻合。實驗結果表明,本文提出的相位超前補償方法可有效消除控制滯后所帶來的消極影響,較大地改善了永磁同步電動機的控制性能。
4 結 語
針對永磁同步電動機矢量控制系統中存在的控制滯后問題,本文通過對控制過程中控制滯后現象的分析和所帶來的矢量滯后相角的推導,提出了一種新型補償控制算法。仿真及實驗結果均表明了本文提出的補償控制算法有效地改善了高速永磁同步電動機控制系統的穩態性能,為后續永磁同步電動機更高性能控制打下了良好的基礎。
[1] 何苗,劉政華.基于DSP 的無傳感器永磁同步電機控制器設計[J].微特電機,2010(10):63-65.
[2] 楊南方,駱光照,劉衛國.誤差補償的永磁同步電機電流環解耦控制[J].電機與控制學報,2011,15(10):50-54.
[3] 張細政,王耀南,楊民生.永磁同步電機無位置傳感器雙滑模魯棒控制[J].電機與控制學報,2005,20(2):359-366.
[4] 劉治鋼,王軍政,趙江波.永磁同步電機神經網絡自適應滑模控制器設計[J].電機與控制學報,2009,13(2):290-295.
[5] Bae B H,Sul S K.A compensation method for time delay of full digital synchronous frame current regulator of PWM AC drives[J].IEEE Transactions on industry applications,2003,39 (3):802 -810.
[6] Choi C,Lee W.Analysis and compensation of time delay effects in hardware-in-the-loop simulation for automotive PMSM drive system [J].IEEE Transactions on industrial electronics,2012,59(9):3403-3410.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
