水聲設(shè)備動態(tài)定位精度測試方法研究*
2013-11-23 07:54:04
艦船電子工程 2013年5期
(1.92213部隊 湛江 524022)(2.91388部隊 湛江 524022)
1 引言
對水聲測控設(shè)備而言,水下定位精度是最重要的技術(shù)指標(biāo)之一,它直接影響試驗中彈道參數(shù)測量結(jié)果的可信度,是影響試驗結(jié)果有效性評估的重要參數(shù)。在海洋環(huán)境下,水聲設(shè)備對目標(biāo)的定位測量精度一直比較難檢定,主要原因為:1)水聲定位的測量精度受到水聲環(huán)境許多不確定因素的影響;2)海洋動態(tài)環(huán)境下難以提供運動目標(biāo)位置標(biāo)定的有效手段和方法。對水聲跟蹤設(shè)備目標(biāo)動態(tài)定位精度檢驗方法研究是很必要的。
2 測量原理和方案
水聲測控設(shè)備動態(tài)精度檢測的關(guān)鍵在于對目標(biāo)運動發(fā)出聲源信息位置的精確測量,各水聲測控設(shè)備同步對目標(biāo)進行定位解算,通過數(shù)據(jù)分析測定各測控設(shè)備的動態(tài)定位精度。潛艇在潛望時可以用GPS 定位測量,通過事后處理提高定位精度;魚雷可以利用其內(nèi)測數(shù)據(jù),經(jīng)過組合技術(shù)處理、運動設(shè)計提高精度。
只要能準(zhǔn)確測量目標(biāo)聲頭(聲源)位置,即可實現(xiàn)系統(tǒng)校正,簡易方案如下:在試驗船上安裝聲頭,發(fā)射同步聲脈沖,利用高精度DGPS和航姿測量系統(tǒng)準(zhǔn)確測量聲頭的準(zhǔn)確位置。系統(tǒng)構(gòu)成如圖1。
聲頭精確位置計算方法為:假定天線到聲頭的高為H,天線高斯坐標(biāo)為(X,Y),設(shè)載體姿態(tài)測量的航向角、俯仰角和橫滾角分別為ψ、θ和γ,則姿態(tài)方向余弦轉(zhuǎn)換矩陣為
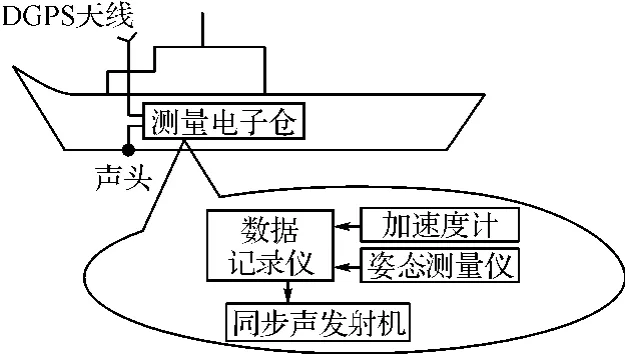
圖1 系統(tǒng)構(gòu)成原理圖
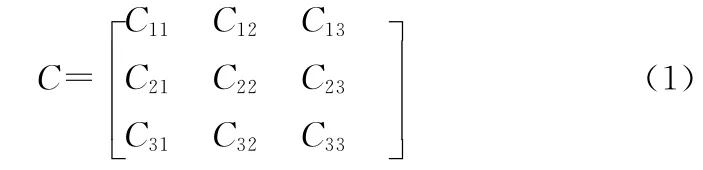
其中:
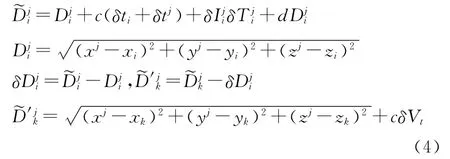
位置修正公式為

聲頭精確高斯位置為

該方法組成簡單,使用方便,只需研制便于安裝的聲頭即可。聲頭位置在水線下3~6m,位于聲表面層上,由于等溫效應(yīng)和虛源效應(yīng)的影響,和實際聲測量的情況不一致(實際聲頭一般在躍變層以下),所以其測量的結(jié)果不能反映聲設(shè)備實際測量潛艇魚雷等運動目標(biāo)的情況。同時該方法對聲被動跟蹤測量系統(tǒng)更是無能為力。所以標(biāo)校聲設(shè)備定位精度最好利用潛艇、魚雷等真實目標(biāo),準(zhǔn)確測量其運動軌跡。
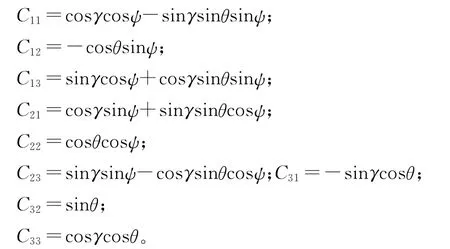
由于潛艇在潛望狀態(tài)航行時其艇上GPS接收機可以測量位置,聲源一般安裝在發(fā)射管中的雷上(水聲被動測量時聲源在螺旋槳附近),在潛望狀態(tài)下,聲源深度大約15m。在艇上安裝高精度姿態(tài)測量設(shè)備,可以準(zhǔn)確推算艇上聲頭每一時刻的位置、魚雷發(fā)射的起始點位置、姿態(tài),從而可以利用魚雷姿態(tài)、加速度測量設(shè)備準(zhǔn)確推算魚雷位置。測量設(shè)備構(gòu)成如圖2、圖3。
圖2 潛艇測量設(shè)備示意圖
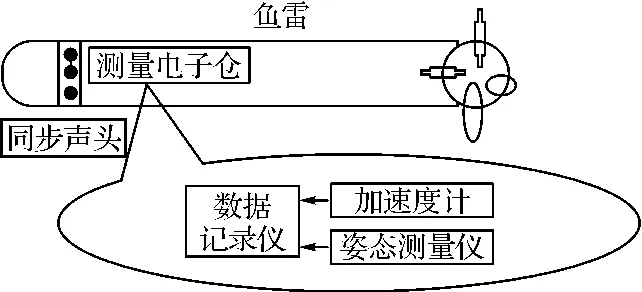
圖3 魚雷測量示意圖
測量設(shè)備包括:利用潛艇的GPS接收天線接收GPS信號,用GPS OEM 解算模塊測量衛(wèi)星偽距、潛艇位置,并記錄和存儲,測量船上同步測量衛(wèi)星偽距、差分修正數(shù)以修正目標(biāo)位置;結(jié)合光纖陀螺實時推算潛艇聲源的準(zhǔn)確位置;魚雷發(fā)射后,記錄發(fā)射時刻、位置,利用慣導(dǎo)組合導(dǎo)航技術(shù)推算魚雷的位置。經(jīng)過事后處理確保目標(biāo)測位精度在5m 以內(nèi)。水聲設(shè)備同步測量目標(biāo)、魚雷位置,聲線聲速儀同步測量聲速梯度,通過數(shù)據(jù)處理比對,得到聲測量設(shè)備的精度。
整個工作流程如下:潛艇在潛望狀態(tài)航行,GPS測量潛艇位置,測量船上同步測量GPS差分?jǐn)?shù)據(jù),用于事后計算潛艇的準(zhǔn)確位置;光纖陀螺配合測量計算潛艇聲源的準(zhǔn)確位置,水聲設(shè)備同步測量潛艇位置。至此完成在水下低速條件下對水聲設(shè)備標(biāo)校的測量工作。潛艇發(fā)射魚雷,記下發(fā)射的起始時刻、點位、姿態(tài),魚雷設(shè)定為直航,由內(nèi)計儀系統(tǒng)計算目標(biāo)位置,經(jīng)過數(shù)學(xué)方法處理,確定魚雷的準(zhǔn)確位置,由于目標(biāo)的運動方式簡單,得到的測量精度較高。聲學(xué)設(shè)備同步測量魚雷位置,對測量結(jié)果進行處理、比對,可以得到水聲測量系統(tǒng)的定位精度。測量設(shè)備包括艇上新裝或研制GPS接收機1臺,差分接收機1 臺,魚雷內(nèi)計數(shù)據(jù)錄取系統(tǒng)1套,光纖陀螺1個,聲速測量儀1套。
各設(shè)備作用如下:GPS接收機、差分接收機:用于目標(biāo)大地坐標(biāo)的準(zhǔn)確測量;光纖陀螺:用于配合測量計算目標(biāo)聲源的準(zhǔn)確位置;魚雷內(nèi)計數(shù)據(jù)錄取系統(tǒng):用于內(nèi)計測量魚雷的運動軌跡;聲速測量儀:用于測量海區(qū)的聲速情況,確定聲源位置能否滿足測試的要求。
3 潛艇天線、聲源位置的準(zhǔn)確測量方法
在測量船上測量GPS定位的位置、偽距修正數(shù),潛艇在潛望狀態(tài)通過GPS,得到位置、偽距參數(shù),并為光纖陀螺提供誤差修正,用組合導(dǎo)航模式計算潛艇聲源的位置。
3.1 GPS的精確測量
采用偽距差分技術(shù)。通過在基準(zhǔn)站上利用已知坐標(biāo)求出測站至衛(wèi)星的距離,并將其與含有誤差的測量距離比較,然后利用α-β濾波器將此差值濾波并求出偏差,將所有衛(wèi)星的測距誤差傳輸給用戶,用戶利用此測距誤差來修正測量的偽距,從而求出自身的坐標(biāo)。如果基準(zhǔn)站、用戶站均觀測了相同的4顆或4顆以上的衛(wèi)星,即可實現(xiàn)用戶站的定位。偽距差分原理:
由于偽距差分可提供單顆衛(wèi)星的距離改正數(shù)δDi,因此用戶站可選其中任意4顆相同衛(wèi)星的偽距改正數(shù)進行改正,而不必要求兩站觀測的衛(wèi)星完全相同,且偽距改正數(shù)是直接在WGS-84坐標(biāo)系上進行的,是一種直接改正數(shù),定位精度更高,且使用更方便。由于偽距差分定位依賴于兩站公共誤差的抵消來提高定位精度,誤差抵消的程度決定了精度的高低。誤差的公共性在很大程度依賴于兩站距離,隨著兩站距離的增加及衛(wèi)星的高度角、天線的指向性及高程差異,其誤差公共性逐漸減弱,特別是潛艇天線高程較低時,這種差異性隨目標(biāo)離基準(zhǔn)站的距離增大而更加明顯,偽距差分后的剩余誤差將更大。文章采用移動基準(zhǔn)站的方案,即利用星站差分技術(shù)確定測量船接收機的準(zhǔn)確位置,測量精度可以達到15cm,再由接收機偽距和位置確定衛(wèi)星偽距修正數(shù),選取和潛艇接收機一致的衛(wèi)星進行偽距修正定位,因測量船和潛艇距離在10km 以內(nèi),定位結(jié)果有高度的相似性,從而得到精確位置,其測量誤差為位置誤差和偽距碼誤差的疊加,可達75cm。
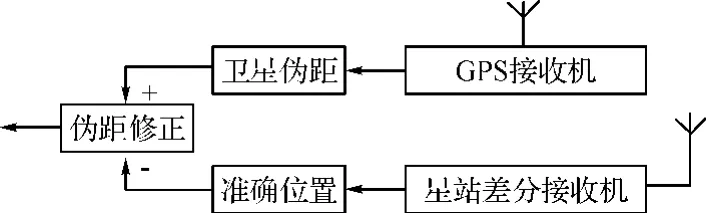
圖4 測量船GPS修正數(shù)據(jù)生成部分
3.2 利用GPS組合導(dǎo)航算法計算聲源位置
利用光纖陀螺測量載體的姿態(tài),設(shè)載體的航向角、俯仰角和橫滾角分別為ψ、θ和γ,則載體坐標(biāo)系與地理坐標(biāo)系的姿態(tài)陣為C(見式(2)),即聲頭在載體的坐標(biāo)增量為

聲頭在高斯坐標(biāo)下的位置為

其中(X0,Y0,Z0)為修正后的GPS 天線準(zhǔn)確高斯坐標(biāo),(ΔX,ΔY,ΔZ)為聲源在潛艇上的坐標(biāo)。
4 純內(nèi)計儀模式下魚雷位置測量方法
由于目標(biāo)在水下運動受水流等因素影響會引起位置偏差,直航模式、航向與水流方向一致時影響最小,這種影響可以通過組合系統(tǒng)測量,在直航模式下目標(biāo)運動的角度增量很小,考慮數(shù)據(jù)處理的簡易性、測量實施的簡便性,設(shè)計潛艇、魚雷為直航方式。
現(xiàn)代魚雷裝有高精度陀螺系和加速度計,可以較準(zhǔn)確推算魚雷位置,需要已知魚雷的起始位置和校準(zhǔn)航向,并最大限度減少魚雷運動的復(fù)雜度,以減小因速度控制等因素帶來的附加誤差。當(dāng)潛艇發(fā)射魚雷時,記錄發(fā)射時刻、位置、姿態(tài),魚雷直航,魚雷內(nèi)記儀記錄魚雷的運動狀態(tài),進行數(shù)據(jù)處理,由起始點推算魚雷準(zhǔn)確位置,魚雷和潛艇運動態(tài)勢如圖5。下面利用內(nèi)置于魚雷的導(dǎo)航系統(tǒng)解算魚雷的位置。
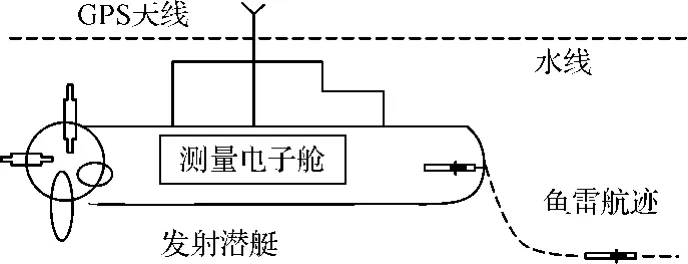
圖5 魚雷和潛艇運動軌跡設(shè)計圖
4.1 魚雷內(nèi)計儀組成及其數(shù)學(xué)平臺
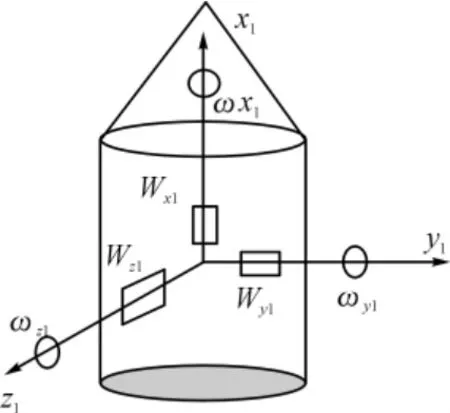
圖6 小型陀螺捷聯(lián)系統(tǒng)示意圖
現(xiàn)代魚雷的位置一般由小型陀螺和加速度計構(gòu)成的捷聯(lián)導(dǎo)航系統(tǒng)推算得到,捷聯(lián)系統(tǒng)由三維小型陀螺和三個石英加速度計固連于魚雷三個雷體軸上,如圖6所示,三維小型陀螺測量沿雷體軸x1,y1,z1方向的角速度為ωx1、ωy1、ωz1。三個加速度計測量沿雷體軸x1,y1,z1方向的視加速度
捷聯(lián)系統(tǒng)中小型陀螺輸出脈沖數(shù)代表雷體在采樣時間內(nèi)的轉(zhuǎn)角增量,若已知雷體的初始參數(shù),并測得各采樣時刻雷體的轉(zhuǎn)角增量,則可用數(shù)值迭代法求解轉(zhuǎn)動角。設(shè)陀螺儀測出雷體從第(k-1)次采樣時間到第k次采樣時間內(nèi)的轉(zhuǎn)角增量為
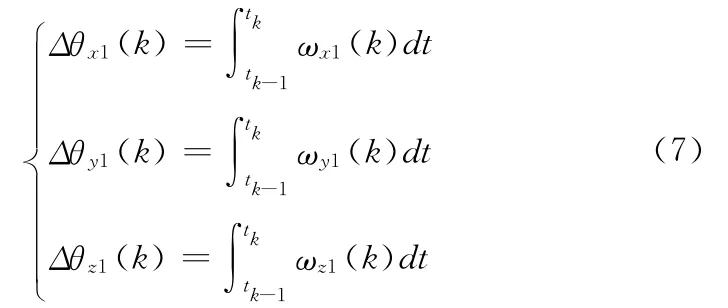
式中Δθx1(k)、Δθy1(k)、Δθz1(k)分別為從第k-1 次到第k次采樣時間內(nèi)雷體繞三個坐標(biāo)軸的轉(zhuǎn)角增量;tk-1為第k-1次采樣時的時間;tk為第k次采樣時的時間(k=1,2,3,…);根據(jù)轉(zhuǎn)角增量及初始角即可計算目標(biāo)的姿態(tài)。
4.2 小型陀螺捷聯(lián)導(dǎo)航方程
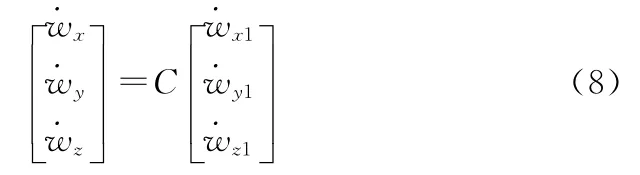
由圖6可知,三個擾性加速度計測出沿雷體軸的三個視加速度分量,則可求出在慣性系的視加速度,即:則魚雷的運動方程為
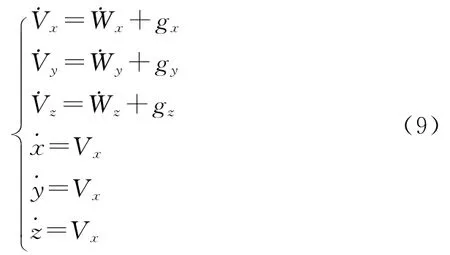
可得雷體的實時位置和速度的差分方程解如下:
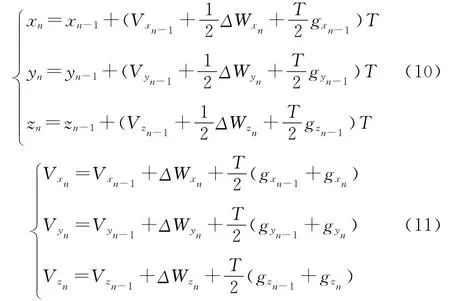
式中g(shù)x、gy、gz為考慮J2項攝動的重(浮)力項在慣性坐標(biāo)系三個方向上的分量。根據(jù)上式可計算目標(biāo)各時刻的位置和速度。
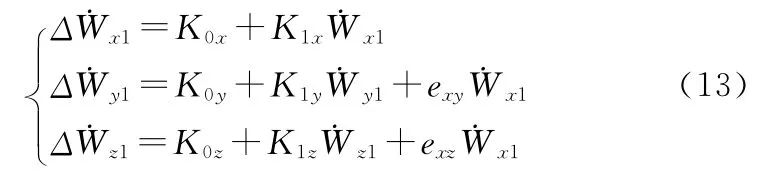
4.3 小型陀螺及加速度計的誤差模型
4.3.1 捷聯(lián)系統(tǒng)陀螺的誤差模型
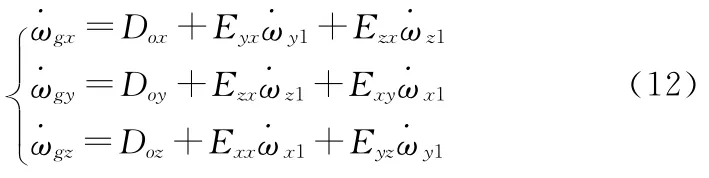
4.3.2 石英加速度計的誤差模型
4.4 數(shù)值仿真
取計算步長為100ms,用捷聯(lián)慣性器件誤差模型計算各項誤差,假定陀螺漂移為0.05°/6h,初始位置誤差為1m,初始航向誤差為0.010,加速度計隨機誤差為0.005g,安裝誤差即安裝方向的不一致性引起的誤差可以在岸上綜合補償消除,靈敏度為0.002g,由于總航行時間為4min,航向設(shè)定為直航,各種漂移和誤差不可控因素減低到最少,魚雷運行正常,其計算位置完全為目標(biāo)位置,經(jīng)仿真總體測量誤差不大于5m。
5 聲測量設(shè)備定位精度計算
5.1 數(shù)據(jù)的線性擬合
首先進行聲傳輸速度差異的修正,GPS測量和內(nèi)計儀推算的是t時刻的目標(biāo)位置,聲設(shè)備測量的是t-Δt時刻的目標(biāo)發(fā)出的信號或噪聲,對其進行修正得到同時刻的測量數(shù)據(jù)。假設(shè)魚雷航路設(shè)計成直線,在航行的穩(wěn)定段,為勻速直線航行。令

可以利用此特性對所有測量數(shù)據(jù)進行最小二乘直線擬合,得到目標(biāo)運動測量中心線的無偏估計。為使相鄰直線首尾相接,k為待定系數(shù),根據(jù)最小二乘原理,應(yīng)使Q=為最小。令dQ/dk=0,得

式中,k值確定直線的斜率,它的大小與n值選取有關(guān),n大,平滑效果好,但信號波形失真大。對魚雷的運動軌跡進行擬合,得到航行的直線航跡,由于是無偏估計,其總體誤差最小。
5.2 測量精度的計算
設(shè)聲測量設(shè)備測量的位置為(Xi,Yi),(Xi0,Yi0)為差分GPS測量和內(nèi)計儀推算(經(jīng)最小二乘直線擬合)的t時刻的目標(biāo)位置,n為計算的點數(shù),則:
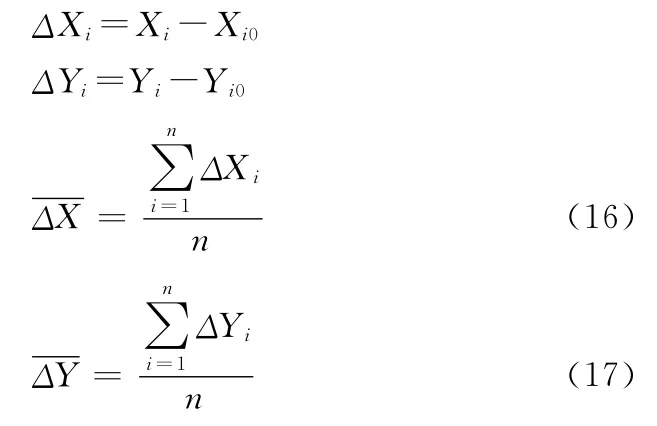
按原點矩計算測距精度指標(biāo):

整個過程分段計算,潛艇定位段用GPS修正數(shù)據(jù)計算聲測位精度,魚雷運動段用內(nèi)計儀數(shù)據(jù)及雷發(fā)射初始點位置計算聲測位精度。
6 結(jié)語
文章研究了在實際測量條件下水聲設(shè)備的動態(tài)精度標(biāo)校方法,方法簡單實用。利用現(xiàn)有裝設(shè)備,無須投入大量的設(shè)備研制購置經(jīng)費,方法成功實施后,可以準(zhǔn)確檢測各種水聲主被動跟蹤定位設(shè)備的海上實際定位精度,為水聲設(shè)備驗收提供必要的技術(shù)支撐,提高測量數(shù)據(jù)的可信度和權(quán)威性,更加有利于水聲測量設(shè)備定位精度的結(jié)果評估。
[1]劉利生.外彈道測量數(shù)據(jù)處理[M].北京:國防工業(yè)出版社,2002.
[2]劉利生.軌跡測量設(shè)備精度自鑒定技術(shù)與評估[M].飛行器測控時報,2000(4).
[3]劉丙申,劉春魁,杜海濤,等.靶場外測設(shè)備精度鑒定[M].北京:國防工業(yè)出版社,2008.
[4]劉根友,朱才連.任超.GPS相位與偽距聯(lián)合實時定位算法[J].測繪通報,2001,(10).
[5]劉基余.GPS測量原理[M].武漢:武漢大學(xué)出版社,2002年.
[6]高社生,等.GPS/SARS組合導(dǎo)航定位技術(shù)[M].西安:西北大學(xué)出版社,2006.
[7]J.A.Fessler,A.O.Hero.Penalized maximum-likelihood image reconstruction using space alternating generalized EM algorithm.IEEE Trans[J].On Image Processing,1995,4(10):1417-1429.
[8]顧笑東,邱志明,袁志勇.雙基陣聲納系統(tǒng)水下目標(biāo)被動定位精度分析[J].火力與指揮控制,2011,36(1)147-150.
[9]孫升賢.利用GPS測定羅經(jīng)差的方法及其精度分析[J].航海技術(shù),2012(3),41-42.
[10]劉大杰,陶本藻.實用測量數(shù)據(jù)處理方法[M].北京:測繪出版社,2000.
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
經(jīng)濟技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
