長基線系統(tǒng)導(dǎo)航陣型設(shè)計*
2013-11-28 09:39:58劉百峰
艦船電子工程 2013年12期
關(guān)鍵詞:測量
劉百峰 羅 坤
(91388部隊 湛江 524022)
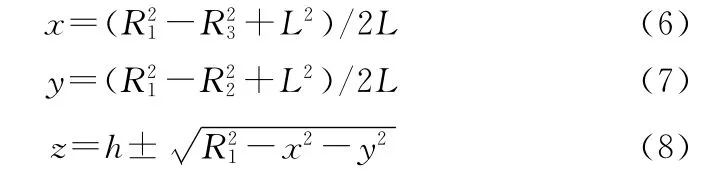
1 引言
長基線水聲導(dǎo)航定位系統(tǒng)[1~3]是水下目標(biāo)試驗鑒定的必需設(shè)備,該系統(tǒng)正式工作前必須首先完成對海底應(yīng)答器的布放,根據(jù)不同的試驗測量要求,布放不同的試驗測量陣形。不同的陣形有不同的適用場合和不同的導(dǎo)航定位精度。常用的陣形有:矩形陣、三角形陣、星形陣和菱形陣等,同時,由于陣型設(shè)計決定了測陣航路設(shè)計,其精度直接影響導(dǎo)航定位精度。本文通過對矩形陣型及三角形陣型進(jìn)行仿真比較并分析影響系統(tǒng)精度的幾種情況,提出最優(yōu)的系統(tǒng)海底陣型設(shè)計[4]。
2 長基線水聲定位系統(tǒng)定位原理
以三個水聽器組成的最簡單的長基線定位系統(tǒng)為例,說明長基線水聲定位系統(tǒng)的基本原理[5~6]。在 海 底 布 設(shè) 由三個水聽器T1、T2、T3組成的接收基陣,在直角坐標(biāo)系中,它們的位置分別為 T1(x1,y1,z1)、T2(x2,y2,z2)、T3(x3,y3,z3),如圖1所示。在對這些水聽器本身的的坐標(biāo)位置進(jìn)行測量校準(zhǔn)后,則它們的坐標(biāo)位置為已知的量。各個水聽器后面都接著一路接收、檢測信號預(yù)處理電路。用應(yīng)答器測量目標(biāo)到各個水聽器間的斜距值ri(i=1,2,3),得出三個水聽器坐標(biāo)位置為中心的三個球面。三個球面將相交于由三個水聽器確定的平面以上和平面以下半個空間的兩個點上,即有兩個解,這有可能造成定位模糊。為解決這一問題,一般是將水聽器布放在水底,則兩個解中位于該平面以下的解可以排除。可用解析法來得出目標(biāo)的位置坐標(biāo)T(x,y,z)。
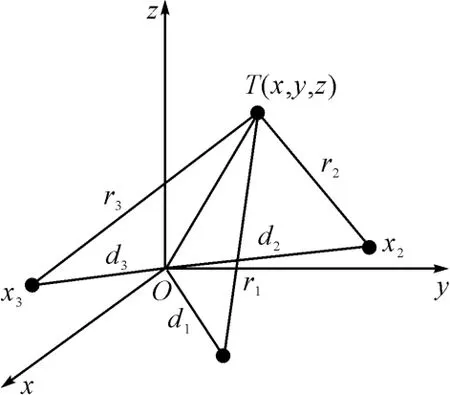
圖1 長基線導(dǎo)航示意圖
3 陣型仿真分析
海底應(yīng)答器陣分系統(tǒng)由多個應(yīng)答器組成。由于不同的陣形有不同的適用場合和不同的導(dǎo)航定位精度。根據(jù)測量區(qū)域要求,陣元有多種測量布局可供考慮[7]。
3.1 矩形陣
首先考察矩形級聯(lián)陣,如圖2所示。測量陣形按矩形布放,取四個應(yīng)答器船的坐標(biāo)分別為:S1(0,0,h),S2(0,L,h),S3(L,L,h),S4(L,0,h)。L=5km,h=58m為測量換能器深度。
陣元呈矩形排列,用距目標(biāo)最近的三個基元進(jìn)行定位解算。三基元呈等腰直角三角形,將上述參數(shù)帶入球形定位方程,得到:

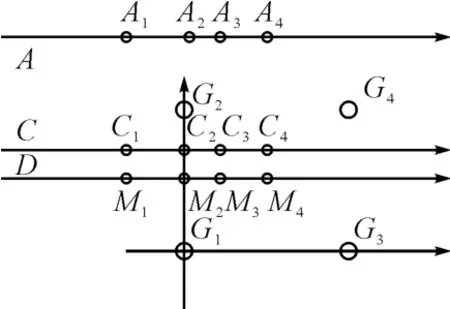
圖2 矩形級聯(lián)陣示意圖
線性化后得到:

容易解得:
求全微分,得:
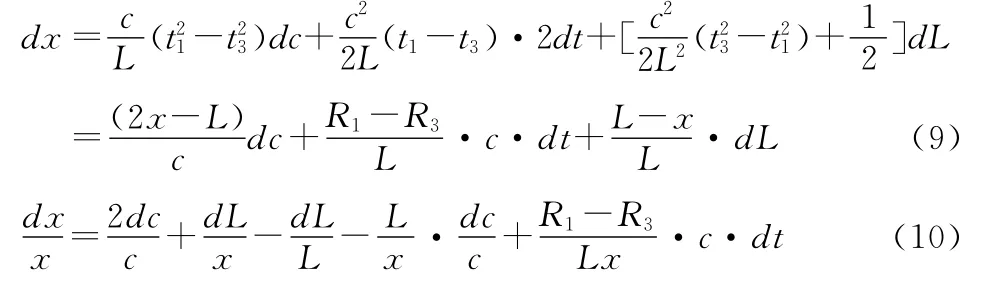
由式(9)、(10)可見,x的定位誤差由聲速測量誤差、測陣誤差和時延估計誤差三部分構(gòu)成。前兩項影響主要表現(xiàn)為相對定位誤差,測陣誤差引起的相對定位誤差與相對測陣誤差相當(dāng),還與測量距離有關(guān),聲速測量誤差引起的相對定位誤差為相對聲速測量誤差的兩倍。時延估計誤差的影響取決于應(yīng)答器到兩測量點的距離差與測量點間距之比。目標(biāo)在陣內(nèi)相對對稱位置,基線越長,誤差越小。
取R1-R3=5km,L=5km,DGPS測陣誤差為ΔL=2m,時延估計誤差為Δt=1ms,聲速測量誤差影響較小,可以忽略,則Δx=0.5‰x+3.5m。同理可求得Y方向定位誤差約為Δy=0.5‰y+3.5m。則總定位誤差約為1.2‰。
3.2 三角形陣
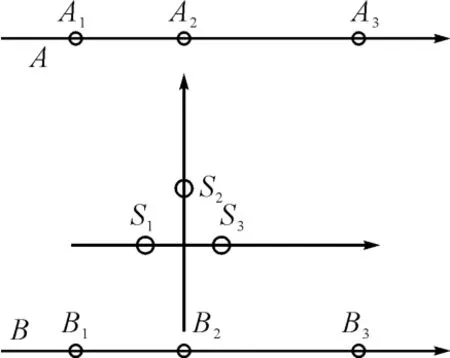
圖3 三角級聯(lián)陣示意圖

下面分析采用三角形陣時系統(tǒng)的定位精度。
目標(biāo)在測量陣外,如圖3所示,S1、S2、S3為陣元,A1、A2、A3、B1、B2、B3為目標(biāo)點位置。仿真結(jié)果與前面類似的分析可以求得x、y的誤差分別為
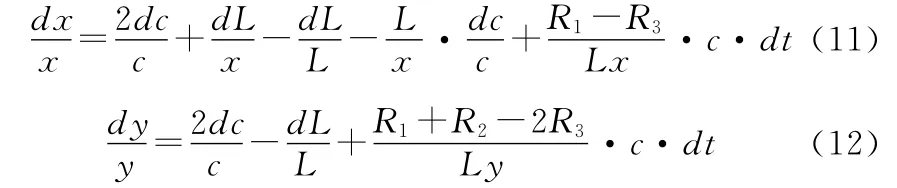
比較式(9)、(10)和(11)、(12)可以看出,在相同參數(shù)條件下,等腰三角形布陣的定位精度比等腰直角三角形布陣的精度略低。
取R1+R2-2R3=10km,R1-R3=5km,L=3.5km,DGPS測陣誤差為ΔL=2m,時延估計誤差為Δt=1ms,聲速測量誤差影響較小,可以忽略,則Δx=0.57‰x+4.1m。同理可求得Y方向定位誤差約為Δy=0.57‰y+4.3m。則總定位誤差約為1.34‰。
由仿真結(jié)果可以看出,采用陣形2時,在相同的測量誤差條件下,系統(tǒng)的定位誤差要大于陣形1。因此,在可能的條件下,為得到較高的測量精度,試驗過程中應(yīng)盡量采用矩形陣。但是三角形陣能在最少應(yīng)答器的基礎(chǔ)上達(dá)到最大測量范圍。
上述結(jié)論是在定點分析的基礎(chǔ)上得出的。表1給出了目標(biāo)在深度已知(深度200m),由測時誤差和測陣誤差引起的定位誤差對目標(biāo)定位精度影響的仿真結(jié)果。
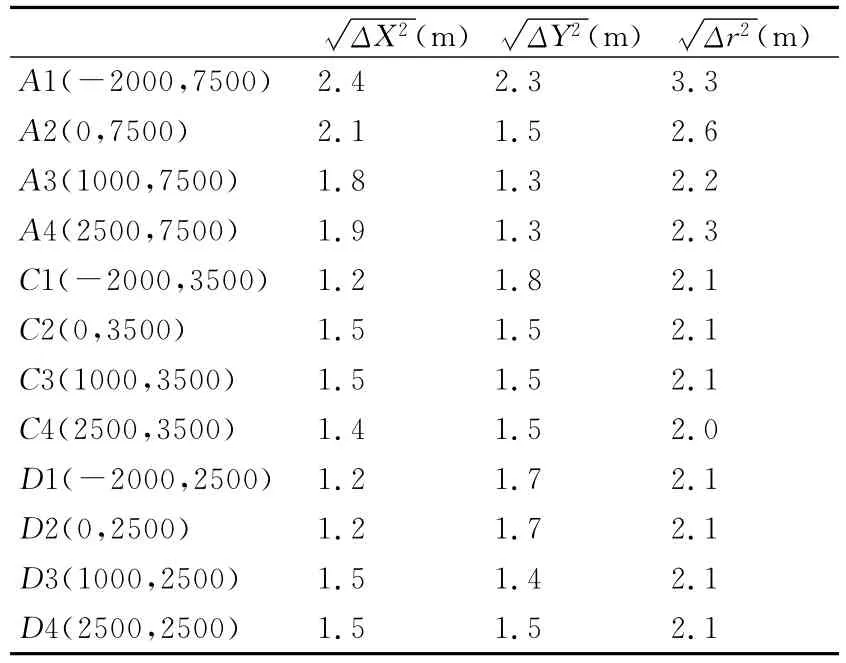
表1 三角形陣測時誤差(-1ms,1ms)+測陣誤差(-2m,2m)
由表1可以看出,對同步定位系統(tǒng),目標(biāo)在陣內(nèi)測量精度較高,陣外精度略差。測量船的坐標(biāo)誤差對應(yīng)答器的定位精度影響比較大,引起的定位誤差與測量船的坐標(biāo)誤差大致相當(dāng),這就要求DGPS有足夠的精度才能保證應(yīng)答器的定位精度,從而保證整個定位系統(tǒng)的定位精度。目標(biāo)到測量矩陣的距離較近時,測量誤差相對較小,隨著距離的增大,誤差隨之增大。
3.3 星形陣
布陣按星形,S1、S2、S3、S4、S5為布放陣元。通過分析可知
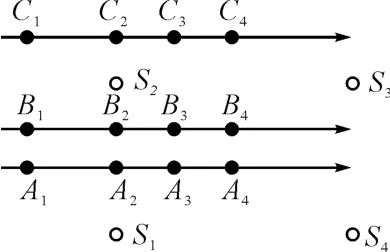
圖4 星形陣示意圖
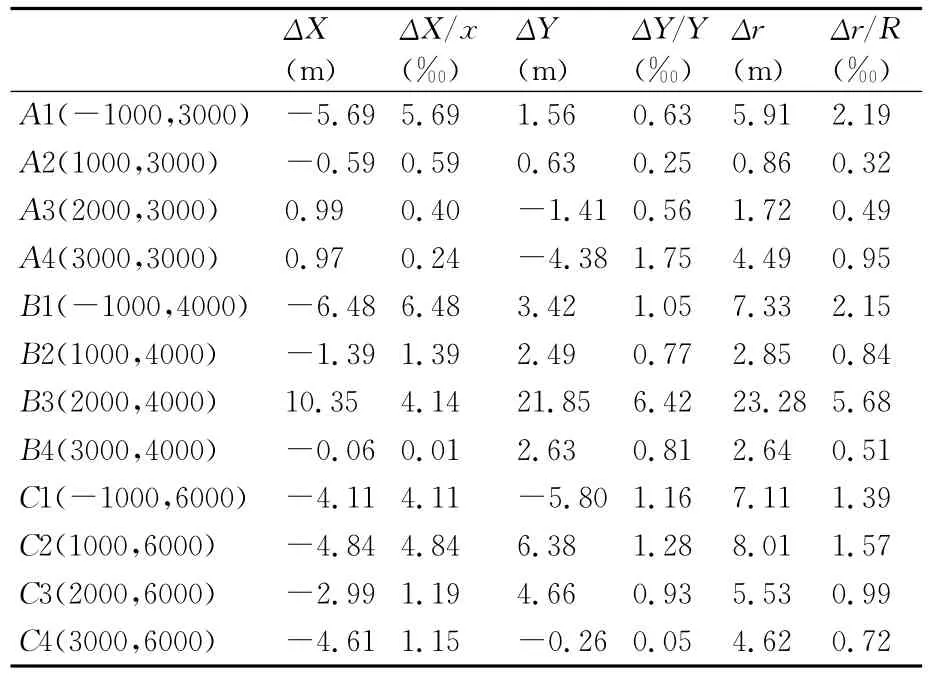
表2 星形陣測陣誤差(-2‰,2‰)+測距誤差(-3‰,3‰)
由表2可以看出,目標(biāo)到測量矩陣的距離較近時,測量誤差相對較小,隨著距離的增大,誤差隨之增大。
3.4 菱形陣
布陣按菱形,邊長4km,S1、S2、S3、S4為 陣 元,其 坐 標(biāo) 分 別 為 (1000,1000),(3000,3464)、(7000,3464)、(5000,1000),深度為160m。
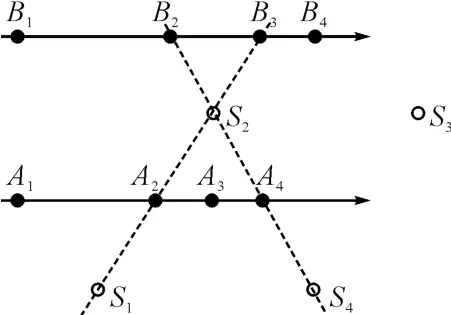
圖5 菱形級聯(lián)陣示意圖
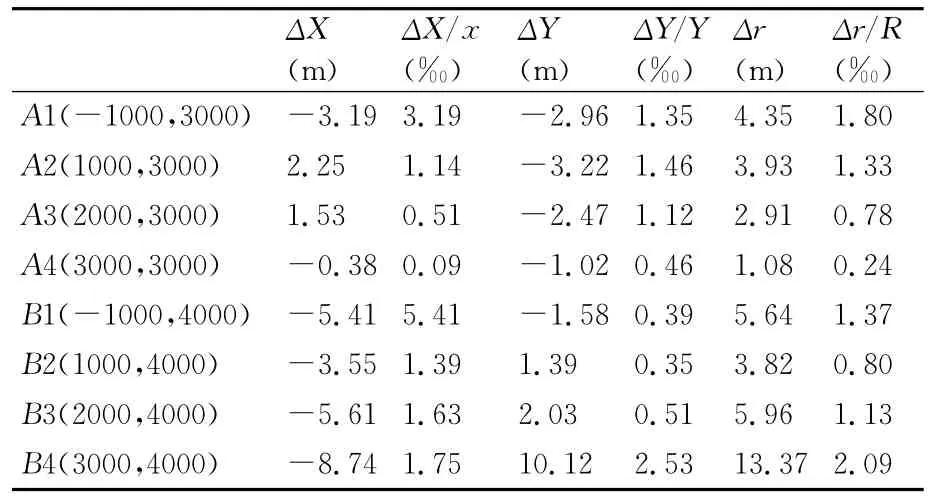
表3 菱形級聯(lián)陣測陣誤差(-2‰,2‰)+測距誤差(-3‰,3‰)
由表3可以看出,目標(biāo)在陣內(nèi)測量精度較高,陣外精度略差。測量船的坐標(biāo)誤差對應(yīng)答器的定位精度影響比較大[9],引起的定位誤差與測量船的坐標(biāo)誤差大致相當(dāng),目標(biāo)到測量矩陣的距離較近時,測量誤差相對較小,隨著距離的增大,誤差隨之增大。
4 海試驗證
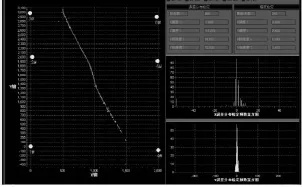
圖6 海試結(jié)果圖
圖(6)是在南海某海域試驗中采用的陣型設(shè)計,由于需要對目標(biāo)進(jìn)行精確定位,因而采用了矩形陣,目標(biāo)在陣中行走。良好海況,海深60m,聲速1500m/s,目標(biāo)聲頭深度6m,浮標(biāo)聲頭深度25m,系統(tǒng)同步周期6s。目標(biāo)船以小于5節(jié)航速在陣中低速航行。
從導(dǎo)航軟件可以看出,運動目標(biāo)軌跡與目標(biāo)自帶GPS的軌跡幾乎重合,證實了矩形級聯(lián)陣的精度符合要求。
5 結(jié)語
經(jīng)過對長基線系統(tǒng)幾種可能的布放陣型進(jìn)行仿真分析,提出了在不同要求下適合長基線導(dǎo)航的陣位設(shè)計;并且對其中的矩形陣進(jìn)行海試驗證,在良好水文環(huán)境下完全達(dá)到了試驗要求。
[1]Daniel B Kilfoyle,Arthur B Baggeroer.The state of art in underwater acoustic telemetry[J].IEEE JOE,2000,25:4-27.
[2]丁士圻.對水下目標(biāo)的大地坐標(biāo)測量[J].海洋工程,1996(2):23-29.
[3]殷冬梅,等.無線遙控浮標(biāo)式水下目標(biāo)跟蹤定位系統(tǒng)[J].系統(tǒng)下工程與電子技術(shù),2004,26(9):1246-1249.
[4]CAI Yanhui,et al.Underwater GPS Positioning System[C]//International Symposium on GPS/GNSS 2005.HongKong,2005.
[5]王權(quán),等.差分GPS水下立體定位系統(tǒng)[J].測繪科學(xué),2006,31(5):18-21.
[6]劉林泉.水聲綜合測控系統(tǒng)關(guān)鍵技術(shù)研究[D].哈爾濱:哈爾濱工程大學(xué),2008,3:49-55.
[7]焦君圣,等.定位浮標(biāo)在波浪中的動態(tài)響應(yīng)[J].海洋技術(shù),2003,22(4):14-17.
[8]王澤民,羅建國,陳琴仙,等.水下高精度立體定位導(dǎo)航系統(tǒng)[J].聲學(xué)與電子工程,2005(2):1-3.
[9]黃韋達(dá).長基線定位導(dǎo)航系統(tǒng)浮標(biāo)水聲軟件設(shè)計[D].哈爾濱:哈爾濱工程大學(xué)碩士論文,2008:85-96.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00